地铁隧道打孔设备的研发分析
2021-06-25张睿航王宏杰贾玉周李政
张睿航,王宏杰,贾玉周,李政
(中建安装集团有限公司,江苏 南京 210000)
1 技术背景
随着我国城市轨道交通建设的快速发展,地铁隧道占比越来越多,地铁隧道牵引供电接触网、侧壁电缆、管道以及紧急疏散平台等机电安装需要在隧道壁上钻大量的安装孔,目前,仍主要采用人工划线、作业平台辅助人工手持钻孔作业模式,存在以下不足:
(1)由于钻孔数量较多,为满足工期要求,不得不雇用大量技工,成本高;
(2)人工作业质量,如钻孔的位置、钻孔方向准确性和一致性难以保证;
(3)部分安装孔的位置较高,需要搭建临时支架或移动式升降平台,辅助作业时间长,降低了作业效率,且高空作业,存在安全隐患问题。
为节约成本、加快施工进度、提高施工质量、保证施工安全,研发隧道钻孔机械手,实现钻孔作业全自动机械化施工,并建立BIM模型分析如图1所示。

图1 BIM建模分析图
2 重难点分析
因钻孔设备需通过载运车实现纵移,轨道与载运车之间的相对位置随着载运车纵移不断变化,轨道自身的空间位置也会因线路或安装实际状态表现为随纵向位置的不同而不同,使孔位标记自动化的实现因测量基准的不确定性而具有挑战性;钻孔作业时的动反力、作业机构运动控制过程中的动载荷会使作业机构(弹性变形是不可忽视的)或者机体发生振动,影响机构精准控制的平稳性;机构运动间的摩擦、间隙、黏滞等非线性因素的客观存在,机构运动控制本质也是非线性控制系统,使得基于几何计算的位置开环或者小闭环控制注定无法实现工程精度要求,而传统闭环控制策略也往往会产生极限环振荡,影响控制效果;基于孔位的大闭环控制需要,实时测量目标点与钻头实际位置之间的偏差,接触式测量工程上无法实施,非接触式精密测量系统对安装条件、工作环境有很高要求,基于视频图像识别技术因涉及复杂算法如何保证速度和效率也是难题。综上所述,归结如下几个主要技术难点,给出解决方案。
2.1 机构选型及优化
钻机支撑平台可采用空间并联机构,也可采用空间串联机构,并联机构有刚度大的优点,但结构复杂、自重大、运动范围小;本设备采用类似挖掘机的串联机构(串联机械手),多臂并行钻孔机械手,在具体结构型式、动态性能等方面进行优化分析。另外,传动与控制元器件需选用精密器件,满足钻孔作业所需的平稳、快速定位以及可靠钻孔。
项目采用粗定位与精定位两相结合的技术手段,粗定位通过电动轨道车纵移、底座调平、立柱伸缩保证立柱处于垂直位置及连接立柱与中间臂连接关节处于隧道断面中心位置,通过中间臂的转动与伸缩保证末端执行器处于预定位置附近;精定位通过末端执行器相对于中间臂的相对移动与摆动实现准确定位,具体实施时,通过软件控制系统识别末端执行器与预定位置的偏差,通过闭环控制系统驱动末端执行器移动和摆动,实现准确定位。
2.2 孔的目标位和钻头点位之间偏差的准确测量
通过测量与钻杆平行的激光束光斑与目标之间的距离及方位,引导伺服控制系统控制末端执行器准确定位。激光束光斑与目标之间的距离及方位精确测量需采用光学定位技术及其他辅助措施,利用快速算法对测量结果进行校准与修正。
2.3 智能控制策略的研究
该设备具有大惯性、强非线性系统,实现快速、精确控制具有较大难度,研究中重点为非线性补偿技术,本设备采用非线性补偿与智能控制相结合的方法,以满足系统调整过程稳、快、准,满足工程要求。
2.4 机械手整机的稳定性研究
本设备的电动轨道车运行于轨道之上,隧道断面内的支点(轨距)小,末端执行器在洞壁位置,易导致整机倾覆,为了保证倾覆稳定性,本设备产品的机械臂采用大直径空心钢管,在提高刚度的同时尽量减小质量;通过简单的足尺模型实验测定满足实际要求的驱动器功率与转矩,合理确定驱动器参数,尽量减小驱动器质量;通过电动轨道车上增加适当配重增加稳定性;另外,设置抓轨装置提高抗倾覆性能。
3 设备原理与设计参数
3.1 主要技术
隧道轨行式全向内壁钻孔机器人将载运平板车、电源系统以及打孔机械臂有效统一控制,实现各子系统协调工作,采用PLC自动化控制技术,通过程序设定,用以控制不同的子系统协调工作,以达到准确走位、准确找点、准确钻孔的要求。同时,本系统还采用了程序预植技术,在遇到不同孔径、不同高度、不同距离的安装孔以及不同形状的隧道时,通过改变预植程序内的某一项或者几项参数,用以改变钻孔机器人的程序化工作,以满足不同专业不同打孔需求。
3.2 设备指标
本设备采用市面常见汽油发电机供电,为整个设备运行提供源源不断的电源;钻孔设备满足最大孔径30mm扭矩要求;采用无线控制及操作台控制,既可以无线操作也可以通过操作台控制设备运行;两孔最小孔距300mm,最大孔距850mm;两电锤钻头中心距设计时需满足280~900mm可调;轨道中心到施工面可达距离满足最小1700mm,轨道面至顶部可达最大距离6500mm;打孔时如果打在钢筋上,提供两种选择:退出/直接打断;电锤调节角度按照45°的调节范围;液压站及发电机的布局可沉入平板车平台下方,以最大限度的腾出折臂的旋转空间,距轨道面距离≥200mm;两个电锤单独控制,以满足一排有三个孔的施工;发电机加装尾气排放过滤器及噪音减弱装置。
4 经济效益分析
打孔效率与人工相比提升约6~10倍,一条约20km长的地铁线各种安装孔约有620000个,使用该设备可以节约人工约1800个,为施工单位节约人工成本约25万元;施工中缩短工期30天,压缩城市轨道交通站后机电施工时间,对整体地铁建设过程产生的经济效益不可估量,设备组装及现场实际应用如图2所示。
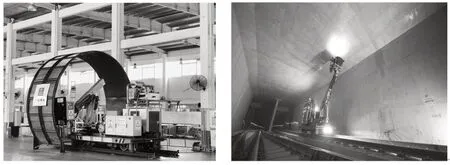
图2 设备组装及现场施工图
5 结语
本文提出了一种地铁隧道打孔的新型设备,考虑了钻孔作业时的动反力、作业机构运动控制过程中的动载荷、机体发生的振动;机构运动间的摩擦、间隙、黏滞等非线性因素的客观存在,具有粗定位与精定位两相结合的技术手段,闭环控制系统驱动末端执行器移动和摆动,实现准确定位。
智能化设备的研发与应用是目前中国发展的大趋势。研发机械自动化、施工智能化等新型设备,应以本单位面临的主要问题及具体条件为导向,做到研究有目的,成果可推广。