基于无人机技术的实景三维建模
2021-06-25周健
周健
(甘肃林业职业技术学院,甘肃 天水741020)
基于无人机技术的实景三维建模实质是利用倾斜摄影技术来获取测区五个不同方向的影像(一个垂直和四个倾斜)[1],从五个方位获取地面物体的全方位的顶面及侧视的信息,最后利用影像特征提取、影像匹配等摄影测量技术,生成区域实景三维模型。本文以甘肃林业职业技术学院校区作为实验对象,利用大疆精灵无人机获取校园的航空影像资料,内业使用ContextCapture 软件建立实景三维模型。
1 无人机实景三维建模的基本流程
1.1 外业工作
外业工作主要包括航摄因子确定、航线规划、像片控制测量等。根据天气条件、测区的地貌地形、测绘产品成果规范要求,对无人机的飞行模式、相机曝光度、照片格式、照片比例等基本参数进行设置,同时根据成图比例尺要求设置飞机飞行航高、航向重叠、旁向重叠度等进行基础设置。最后,为了提高实景三维模型的精度,要给予测区一定约束条件,需在测区范围内布设一定数量的外业像控点,根据测区的基本地形地貌选择飞前控制或飞后控制,飞前控制指的先布设控制点后航飞,飞后控制指先航飞后布设控制点,控制点的个数取决于测区条件和精度要求。其位置要求一般在测区四周和中央必须控制点,其余点位可大致均匀分布于测区其他位置[2]。
本文选取甘肃林业职业技术学院为研究区,测区平均海拔为1250 米,地形以平地和丘陵地为主,测区南北长约为720 m,东西宽约770 m,测区地物主要以房屋和植被为主。
结合学院实验室现有设备,同时为了方便后期实训教学,本次航飞作业飞行平台采用大疆精灵Phantom 4 Pro V2.0 无人机,其中无人机单镜头像素为2000 万,为了满足实景三维建模需要获取倾斜五个方位影像的需要,航线规划软件选用UMap无人机智能规划软件,因测区内最长建筑物为图书馆,长为88m,照片比例为4:3,为避免过多影像分割图书馆,故本次航线选用南北向。同时根据测区内最高建筑物为图书馆(高30m),设置相机倾斜角度为45 度,飞机飞行航高设为105 米,航向重叠度设置为80%,旁向重叠度设置为70%,同时为了清晰呈现测区的边缘模型,需要设置测区外扩,根据航摄因子等参数,航线规划范围外扩100 米(见图1),本次作业测区共拍摄6200 张航空影像。在外业控制测量工作上,采用飞前控制的方法,其控制点靶标采用划“L”字型,为了满足在影像上靶标清晰可见,控制点靶标选择在1 米*1 米尺寸的防水布上油性喷涂打印红色标识,具体为80*60cm 长,宽度为15cm 的“L”字形(见图2),没有特殊说明,外业均测量直角内角,测区内共布设12 个像片控制点,6 个检查点。全部利用南方银河RTK 进行控制点坐标的测量(静态拟合方法)。
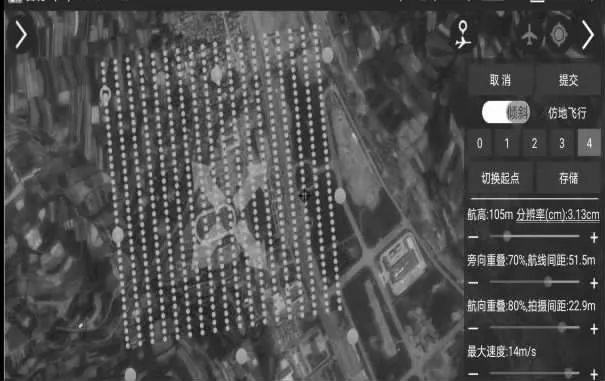
图1 航线规划软件
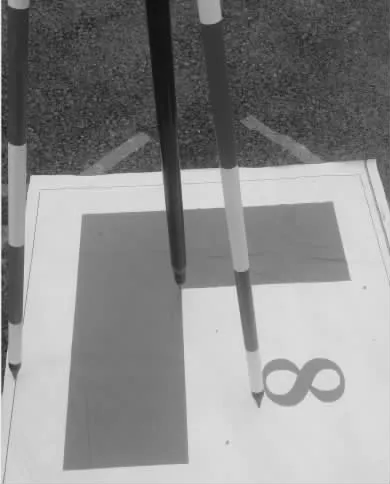
图2 像控点靶标
1.2 内业工作
1.2.1 数据预处理
数据预处理指检查航拍像片的质量[3],包括测区内是否存在航摄漏洞、重叠度、航线弯曲度、像片旋角等是否符合规范要求,同时由于飞行角度原因,导致太阳入射角对于全区照片的色彩会存在偏差,需判断影像是否要进行匀光匀色等操作,最后要删除起飞、降落和向航点飞行等产生的多余影像。
1.2.2 内业实景三维建模
在数据预处理结束之后,采用在测绘、建筑领域应用广泛的ContextCapture 全自动三维建模软件进行实景三维建模工作,ContextCapture 软件为Bentley 公司出品,是通过扫描、拍摄等手段获取现实模型的应用软件,其生产的模型的真实体现第五地貌足够的多细节,同时,可在建模过程中提供准确的地理坐标,可为后期其他应用提供基础数据。
ContextCapture 三维建模基本方法为:导入像片- 导入POS数据- 导入控制点数据并刺点- 空中三角测量- 三维建模-产品生成。其中空中三角测量为关键步骤,其精度直接决定了后续三维建模产品的精度,本次作业要求空三精度报告中单个控制点和检查点的精度均小于1/2 个像素。目前多视影像联合平差技术是三维建模关键的技术,实质就是数字摄影测量中基于特征的提取[4],常用的特征算子包括SIFT、MSER、Moravec、Forstner 等。特征提取后进行数据匹配,软件内置的高密度匹配技术会根据高精度图像匹配算法自动匹配所有图像中所有的同名像点,从而从图像中提取更多特征点,形成一个高密度点云,从而更准确表达地表地表地物地貌的细节。
1.2.3 模型修饰
利用软件直接生成的三维模型在细节上会稍有瑕疵,例如地物之间相互遮挡、特征不明显的水域、反光明显玻璃幕墙均会产生一定的扭曲变形,某些区域纹理拉伸模糊、空洞、冗余碎片、标牌破损、水面残缺、漂浮物等现象均可能产生,解决这些问题可利用手机等地面补拍地物细节并与无人机影像共同参与建模的方式,进行纹理的补充,当然,也可利用精修软件进行三维模型后期的优化和修复工作。目前,市面上常用修模软件有武汉天际航的DPModeler 软件和大势智慧的模方软件。经过处理后的校园实景三维模型和模型细节图分别见图3 和图4。

图3 校园实景三维模型

图4 图书馆东门
2 精度评定
精度是检验模型准确度的指标,本次主要评定模型的平面精度和高程精度。由于考虑外业实测数据也存在一定误差,所以将外业实测数据与在三维模型上量测的对应点数据做对比,并计算中误差,从而判断中误差是否合格。外业上仍然采用南方银河RTK 进行检查点的实际测量,内业上利用软件选取对应的点位,选取点位时要放大到一定倍数,确保点位清晰准确后,才能量测其坐标和高程信息。经过统计,测区内共35 个检查点,高程精度均小 于 0.1m, 高 程 中 误 差0.064m,平面位置精度均小于0.25m,平面中误差为0.145m,从而得出结论,其精度均符合要求。
3 结论
本文以甘肃林业职业技术学院为研究区域,研究基于无人机技术进行校园实景三维建模的方法,经过实验发现,四天即可完成测区770m*720m 范围实景三维模型的制作。而传统的建模软件则是在地貌地物平面信息的基础上建立没有纹理的三维模型[5],平面信息需已知或实际量测,且模型中的纹理需要大量人工拍照后贴到三维模型上,相同面积需要耗时15-20 天,因此借助倾斜摄影测量技术,不仅可以高效率的快速建立测区的具有真实纹理三维模型,同时实地验证其精度,使模型具有地理参数意义,可为学院规划、管网建设、建筑施工提供准确可用的测量数据,也为后期智慧校园的建立提供了数据支持。
