非合作目标交会接近的自主检测和跟踪方法研究
2021-06-25杜荣华张兴星
杜荣华,张 翔,王 宁,汪 玲,张兴星
(1.南京理工大学机械工程学院,南京 210094;2. 南京航空航天大学电子信息工程学院,南京 210016)
0 引 言
随着世界各国对太空资源探索和利用的加剧,卫星应用呈现多样化,航天任务范围大大扩展,不再局限于通信、导航和遥感等传统应用领域,而是向在轨服务[1-2]、在轨装配[3-4]、编队飞行[5-6]和深空探测[7-8]等新型航天任务拓展,这些新型航天任务成为卫星领域关注的研究热点,相关技术也成为国际竞争前沿技术。
这些任务涉及与空间非合作目标的交会接近过程,但由于地面测控站受定轨精度和响应速度等限制,从相距百公里开始,传统的星地回路控制方式不利于航天器的实时控制。为了保障在轨服务、在轨装配、编队飞行和深空探测等任务成功实施,亟需发展对空间非合作目标的自主交会接近功能,其中主要涉及非合作目标自主检测和跟踪方法、自主轨迹规划和自动控制方法的研究。
本文重点研究非合作目标交会接近过程中的自主检测和跟踪方法,即主动星在不依赖地面测控站的支持下,能够自主检测并获取空间非合作目标相对于主动星的相对运动状态。目前常用来测量空间物体之间相对运动状态的有源主动式传感器(例如微波雷达、激光雷达等),由于功耗高、体积大和造价贵等因素,使得它们在实际工程应用中受到很大限制,而光学相机等无源被动式传感器在这方面具有很大的优势[9-10],因为它们可应用于各种卫星间距,并且对卫星质量/功耗的设计影响很小[11],非常适合微小卫星平台的应用。事实上,许多航天器配备了星敏感器,如果方向适当,可用于跟踪其视野范围内的空间目标,并根据视线角测量信息执行相对导航任务[12]。其中,仅测角相对导航技术代表了多种高级分布式空间系统的明确使能技术,包括自主交会和对接、空间态势感知、分布式孔径科学以及非合作目标的在轨维修等任务[13]。此外,仅测角相对导航技术在天基反导监测以及空间碎片探测和清理等领域也有较大的应用前景[14-15]。
实际上,从原始图像中提取空间非合作目标相对于主动星的视线角信息是非常困难的,这需要稳健可靠的目标检测算法,但是在空间目标离主动星较远时,空间目标在图像中呈亮点状,且空间复杂多变的光照环境给非合作环境下的目标检测带来了巨大挑战。针对空间非合作目标自主检测方法的研究,已经公开的在轨实验中,ARGON (使用GPS和光学导航的高级交会演示)实验[16]首先通过比较图像中星点的角速度检测出非恒星目标,然后再依据亮度以及检测到的次数,从所有检测出的非恒星目标中筛选出最佳目标[17]。该目标检测算法的运行速率高达2 Hz,但该目标检测算法仅对感兴趣区域进行处理[18],可能会导致较大的质心定位误差。德国宇航中心开展的AVANTI(自主视觉接近导航和目标识别)实验[11]与ARGON试验相比,光照条件更差,且每30秒才采集一张图像。AVANTI实验的目标检测方法首先将连续多帧图像中的亮点进行匹配以确定非恒星目标[19],并从中检测出要进行抵近的空间目标。但是,该目标检测算法假设空间目标相对于主动星的相对运动轨迹信息先验已知,但在实际的非合作场景中未必能满足该假设,因此需要研究更为稳健的空间非合作目标自主检测算法。
本文从提高空间非合作目标自主检测的稳健性出发,在不依赖先验轨道信息的情况下,进行空间非合作目标的精确识别。首先从摄像机采集的原始图像中检测出所有感兴趣的对象,并根据推导的主动星高精度姿态来确定摄像机的精确指向,进而结合恒星星库和摄像机成像模型进行初步恒星对象剔除操作。然后根据不同对象在图像中的运动轨迹差异将感兴趣的对象标识为恒星、空间目标和相机热点等,进而从原始图像中检测出空间目标。在空间目标仅视线角可观测的条件下,基于相对轨道根数构建相对运动方程,并包含J2摄动效应以及平均轨道根数至密切轨道根数的非线性转换来提高仅测角相对导航系统的可观性,在此基础上,通过EKF构建仅测角相对导航滤波器以推导出空间目标相对于主动星的相对运动状态。最后在3种不同的轨道场景中,对提出的方法进行了地面半物理仿真校验。
1 非合作目标自主检测算法
提出的非合作目标自主检测和跟踪流程如图1所示。其中图像预处理的目的是将原始图像中的各物体从背景中分离出来,并进行质心定位,从而将图像中各物体简化为质心列表,以便进行后面的高精度姿态确定和初步恒星对象剔除等操作。
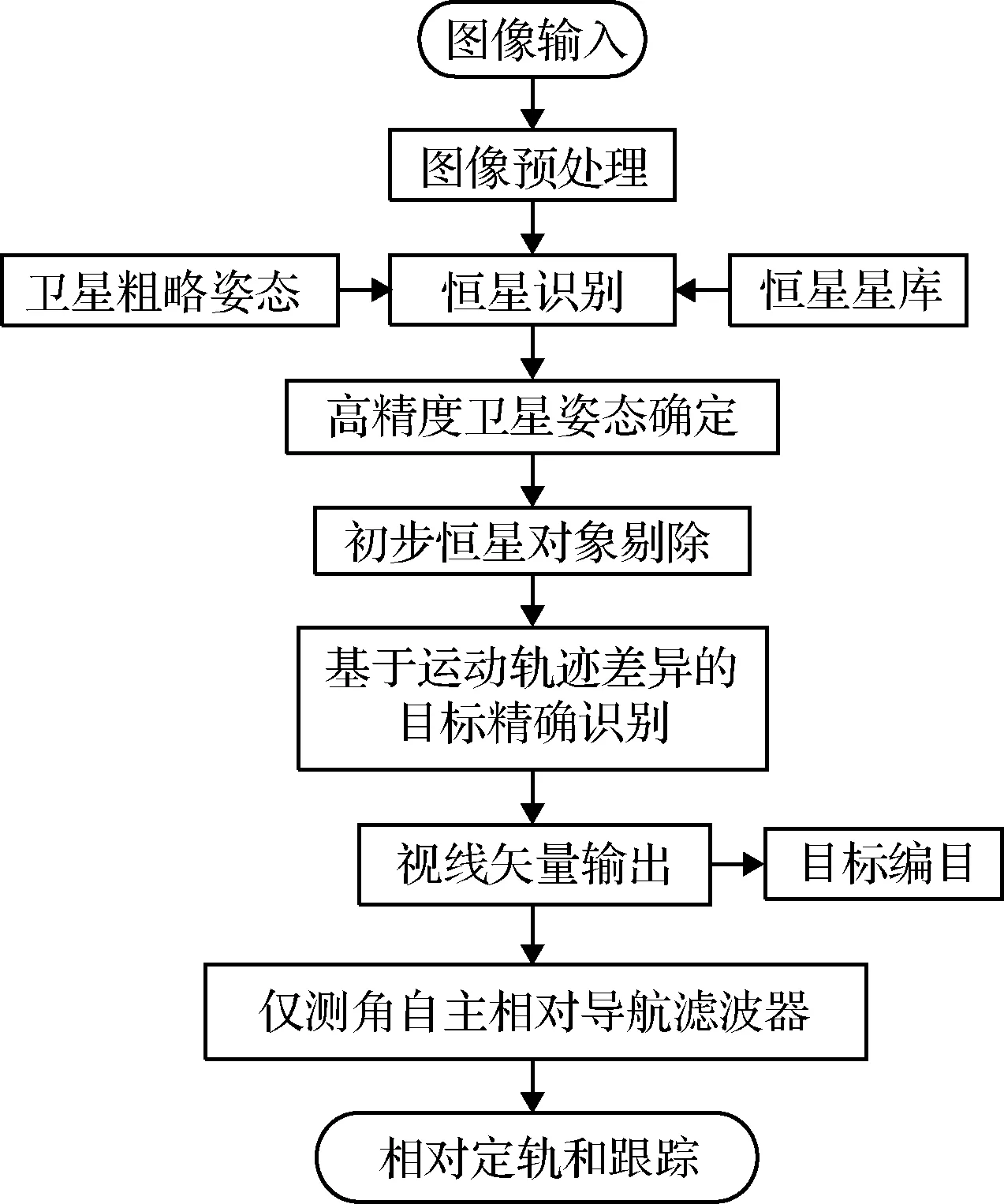
图1 非合作目标自主检测和跟踪流程图Fig.1 Flow chart of autonomous detection and tracking of an uncooperative target
1.1 初步恒星对象剔除
该非合作目标自主检测算法需要识别原始图像中所有发光点对应的分类,包括恒星、空间目标和相机热点等。在较远距离时,由于空间目标和其他物体在图像中都呈亮点状,所以无法从图像中直接区分空间目标与摄像机成像后的其他物体。因此,在主动星粗略姿态已测得的基础上进行恒星识别,进而推导出主动星的高精度姿态信息,利用推导的主动星的高精度姿态信息来确定摄像机的精确指向,并根据恒星星库以及摄像机的成像模型来进行初步恒星对象剔除操作。但是,仍然不能排除几个未被识别的发光点,造成目标检测失败。其中主要存在以下几个问题:
1) 发光点属于恒星天体,但该恒星天体不存在于恒星星库中;
2) 发光点不属于恒星天体,例如其他卫星、空间碎片和小行星等;
3) 摄像机传感器成像的噪声点(也被称为相机热点)的干扰。
后续将在初步恒星对象剔除操作的基础上,继续基于不同对象的运动轨迹差异将空间目标从原始图像中检测出来。
1.2 基于运动轨迹差异的目标精确识别
在进行初步恒星对象剔除操作之后,其余未被识别的质心就是空间目标以及其他可能的非恒星物体、未被识别的恒星和相机热点等。接下来,组合多张连续的图像,并提取各个未被识别物体的运动轨迹,可以通过运动轨迹差异清楚地区分空间目标和其他物体,进而将空间目标从图像中识别出来。当摄像机指向空间目标可见的方向时,空间目标在两张连续的图像之间的位移与未识别的恒星在两张连续的图像之间的位移相比非常小。图2通过显示六个图像序列的组合图来说明该检测方法,其中空间目标的轨迹由黑色五角星表示,未识别的恒星轨迹由白色五角星表示,非恒星物体使用白色三角形表示,相机热点使用白色圆圈表示,并将其他亮点视为噪声点(黑色圆圈)。
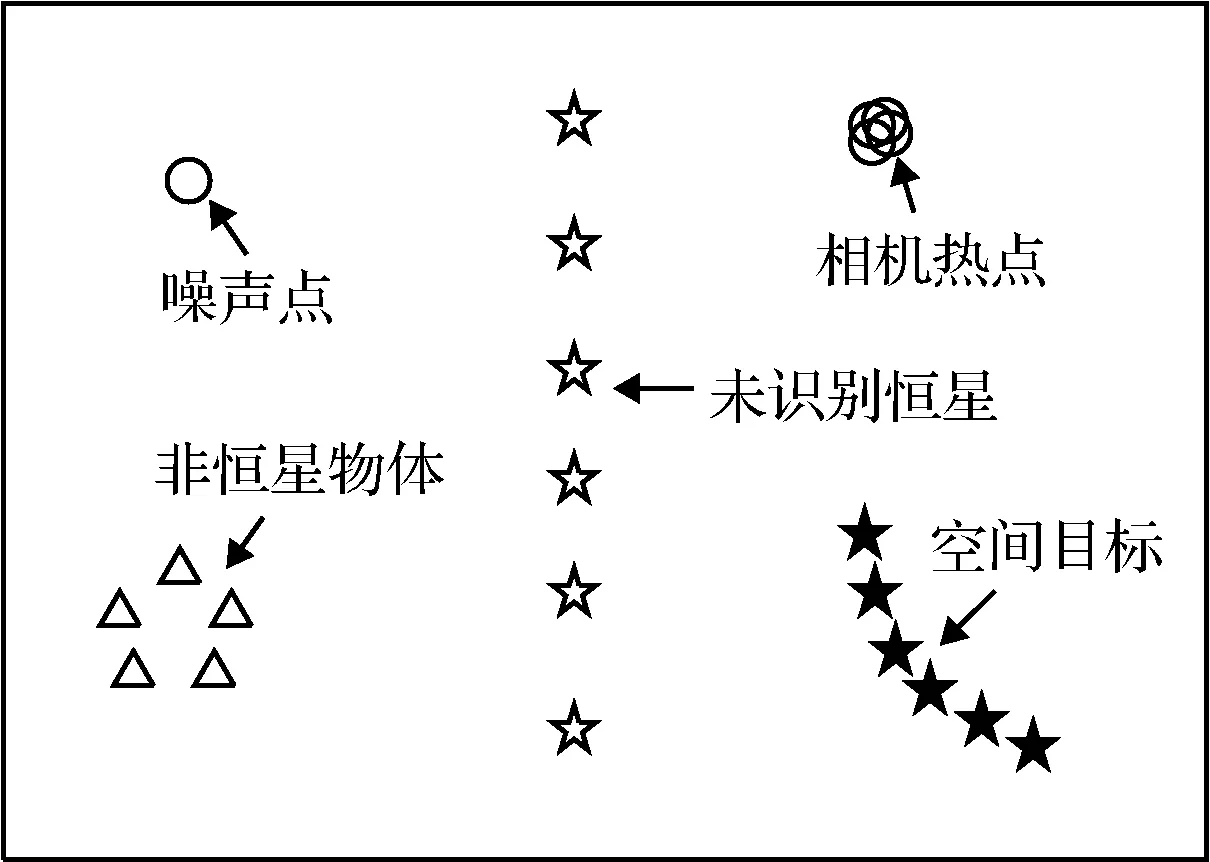
图2 六个图像序列的组合图Fig.2 Combination of six image sequences
该方法主要分4个步骤进行,即:
1)感兴趣对象的检测;
2)连续图像匹配关联;
3)目标判别;
4)目标编目。
1.2.1感兴趣对象的检测
首先,对原始图像中所有感兴趣对象进行检测,并主要分为三类:恒星、空间目标以及相机热点。其中相机热点是一些位置基本保持不变且较亮的像素块。将所有感兴趣的对象称为簇,簇是一组连通的像素集合,其每个像素灰度值都超过阈值I1,并且至少有一个像素灰度值超过阈值I2。若是一个像素的灰度值超过I2,就会在该像素周围生成一个簇。如果像素灰度值大于I1,则应用递归方案将该像素附近的所有像素标记为该簇。阈值I1和I2可以设置为常量或者根据背景和恒星的亮度进行动态调整。
然后,在J2000惯性坐标系中通过赤经α和赤纬δ确定恒星的视线矢量为:
(1)
恒星在摄像机坐标系下的视线矢量为:
(2)

(3)

1.2.2连续图像匹配关联
为了通过运动轨迹的差异来识别空间目标,需要将两张连续图像中的簇进行匹配关联。通过定义相似性度量的方式来描述两张图像中簇的匹配相似程度,其具体公式为:
(4)
式中:ωl和ωp分别为亮度偏差和位置偏差的权重;Δl(i,j)和Δp(i,j)分别为亮度偏差和位置偏差。
Δl(i,j)的具体公式为:
(5)

Δp(i,j)的具体公式为:
(6)

(7)
通过分别设定阈值Δpmax和Δlmax的方式来判断两张连续图像中簇的关联性。如果Δp(i,j)>Δpmax或Δl(i,j)>Δlmax,此时S(i,j)=∞,即没有关联性。
在两个簇实现匹配关联后,可以计算簇在图像中的平均移动速度,其公式可以表示为:
(8)
式中:v(t)为前一张图像中簇的平均移动速度;N为能够跟踪到簇的先前图像的数目。
对于相机热点的检测,可以利用相机热点平均速度特别小的特性:如果N>Nmin,并且其平均速度的范数小于给定的阈值速度大小vmin,则认为该簇为相机热点。
1.2.3目标判别
空间目标为满足以下条件的簇:首先,空间目标不能被标记为恒星或相机热点;其次,空间目标的位置偏差与平均位置偏差差异最大,其平均位置偏差eavg可被定义为:
(9)

结合空间目标不是恒星也不是相机热点的特性,空间目标应满足以下式子:
(10)
式中:Imay为可能的空间目标候选集。
通过上述三个步骤即可完成空间非合作目标的精确识别过程。
1.2.4目标编目
在检测出空间目标的基础上,估计空间目标在J2000惯性参考系中的视线矢量,其关键在于获取主动星上的摄像机坐标系相对于J2000惯性坐标系的姿态信息。
首先,可以通过最小化以下目标函数得到:
(11)


(12)

(13)
(14)
式中:κ∈(0,1)为权重。
因此,空间目标在J2000惯性坐标系下的视线矢量求解公式为:
(15)

2 仅测角相对导航滤波算法
在设计仅测角相对导航滤波器时,考虑基于平均相对轨道根数建立的相对运动模型能够更直观地显示空间目标和主动星之间相对运动轨迹的形状[21],且能够包含J2摄动效应以及平均轨道根数至密切轨道根数的非线性转换,所以比常用的笛卡尔坐标系建立的CW方程具有更高的建模精度,因此本文采用平均相对轨道根数来建立相对运动模型。
首先,在空间目标仅视线角可测量的情况下,每个时刻的观测量只包括两个角度(即方位角α和俯仰角ε),并将视线矢量ρc指向空间目标(见图3)。
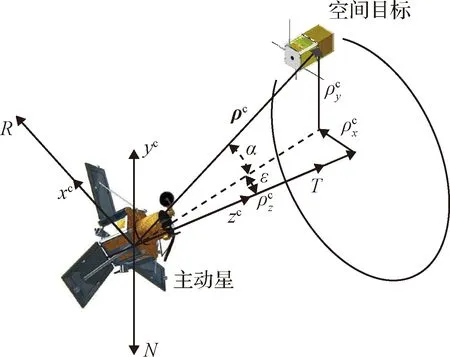
图3 视线角测量几何示意图Fig.3 Geometric diagram of line-of-sight angle measurement
上标“c”表示的是摄像机坐标系,并且根据相对状态x建立以下非线性的测量模型:
(16)
完整的状态估计量由下式组成:
(17)
式中:ao和为空间目标的轨道半长轴;δα为一组无量纲的平均相对轨道根数;b为摄像机的测量偏差。
通过平均相对轨道根数得到相对运动状态的参数化[21]形式为:
(18)
式中:a,e,i,ω,Ω和M是经典的开普勒轨道根数;u=M+ω为卫星幅角;有上标“o”的为空间目标的轨道参数,方程中出现的其他绝对轨道根数都属于主动星。
在HCW方程的假设下,相对偏心矢量δe和相对倾斜矢量δi的大小提供了平面内和平面外相对运动的幅度,而它们的相角描述相对运动的方向。相对半长轴δa和相对平均经度δλ分别表示径向和沿轨道方向的平均偏移。此外,可以根据Brouwer在文献[22]和Lyddane在文献[23]中提出的理论进行平均轨道根数至密切轨道根数的一阶非线性转换,以提高仅测角相对导航系统的可观性。
摄像机的测量偏差b可以表示为:
(19)
空间目标和主动星之间的相对距离假设远小于主动星和地心之间的相对距离。将相对动力学的非线性微分方程简化为线性微分方程为:

(20)

所获得的线性微分方程组的解可以通过状态转移矩阵来表示。在存在控制输入和测量不确定性的情况下,得到状态方程和量测方程为:
(21)
式中:ν(t)为摄像机的测量误差,属于高斯白噪声。
式(21)中的其他矩阵量由下式确定:
(22)
状态转移矩阵Φ(t,t0)为[21]:
Φ(t,t0)=
(23)
式中:
(24)
式中:RE为地球赤道半径;n、i和a为主动星的平均轨道角速度、轨道倾角和轨道半长轴。
摄像机的测量偏差被建模为指数相关的测量误差,其随时间的演变过程由以下状态转移矩阵表示:
(25)
式中:τ为相关的时间常数,当τ=∞时,传感器的测量偏差被建模为不相关的测量误差。
在时间tm处,由脉冲机动引起的相对轨道根数的变化可以在线性相对动力学的假设下进行建模,并利用相对轨道根数表示的HCW方程解的反演得到B(tm)为[24]:
(26)
式中:um=u(tm)表示主动星在tm时刻的卫星幅角。
通过应用以下链规则计算视线角测量量z相对于相对轨道根数δα表示的参考状态的偏导数为:
(27)

采用线性模型给出相对轨道根数与局部LVLH坐标系之间的映射关系为:
(28)
可以使用摄像机坐标系中表示的相对位置相对其自身求偏导得到:
(29)
式中:∂ρc/∂α和∂ρc/∂ε为:
(30)
方位角和俯仰角相对于摄像机坐标系表示的相对位置的偏导数,可以通过式(29)交替乘以(∂ρc/∂ε)T和(∂ρc/∂α)T来计算,得到:
(31)
已知式(27)中的所有分量,则可以求得矩阵C(t),进而得到系统的测量方程。在得到系统状态方程和测量方程的基础上,通过EKF对系统进行动态滤波,进而完成对空间目标的相对定轨和跟踪。
具体包括一步预测方程:
(32)
式中:函数f由前面建立的相对运动模型确定;uk为外部控制输入矢量;F为函数f相对于状态量x的雅可比矩阵;Gk为过程噪声的分布矩阵;Qk为过程噪声协方差矩阵;Pk|k-1为预测误差协方差矩阵。
更新方程:
(33)
式中:Kk为滤波增益;雅可比矩阵Ck由前面求得的C(t)确定;Rk为测量噪声协方差矩阵;Pk为估计误差协方差矩阵;zk为观测量矩阵。
3 仿真校验
3.1 半物理仿真平台搭建
在完成空间非合作目标自主检测和跟踪的算法设计后,搭建验证该算法的地面半物理仿真平台,其结构框图如图4所示。
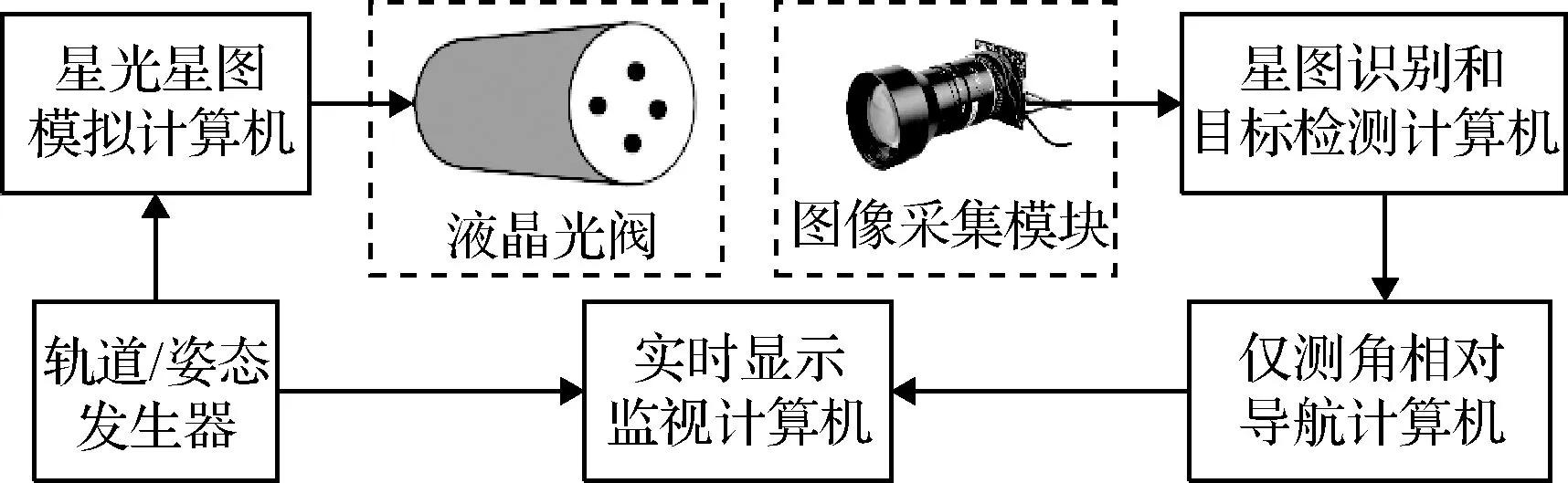
图4 地面半物理仿真平台结构框图Fig.4 Block diagram of ground semi-physical simulation platform
该地面半物理仿真平台主要包括以下部分:
1) 轨道/姿态发生器
该模块内部装有Matlab/simulink软件和STK软件,主要用于生成主动星和空间目标的运动轨迹。
2) 星光星图模拟计算机
该计算机作为星光星图模拟器,主要用来模拟恒星和空间目标在星图中的分布情况及星光等级。
3) 星图识别和目标检测计算机
该计算机的主要功能是在原始图像中找到空间目标,并输出空间目标相对于摄像机的视线矢量。
4) 仅测角相对导航计算机
该计算机的主要功能是完成仅测角相对导航算法的实时运算,输出空间目标相对于主动星的相对运动状态信息。
5) 实时监视显示计算机
该计算机主要用于监视和显示姿态/轨道发生器模拟的主动星和空间目标的姿轨信息以及仅测角相对导航计算机的输出结果。
搭建的实际地面半物理仿真平台如图5所示。该地面半物理仿真平台在原有设备的基础上,配备了精密三轴转台和精密三自由导轨等机械微调装置,可以调整星图显示装置和星图采集模块同轴。
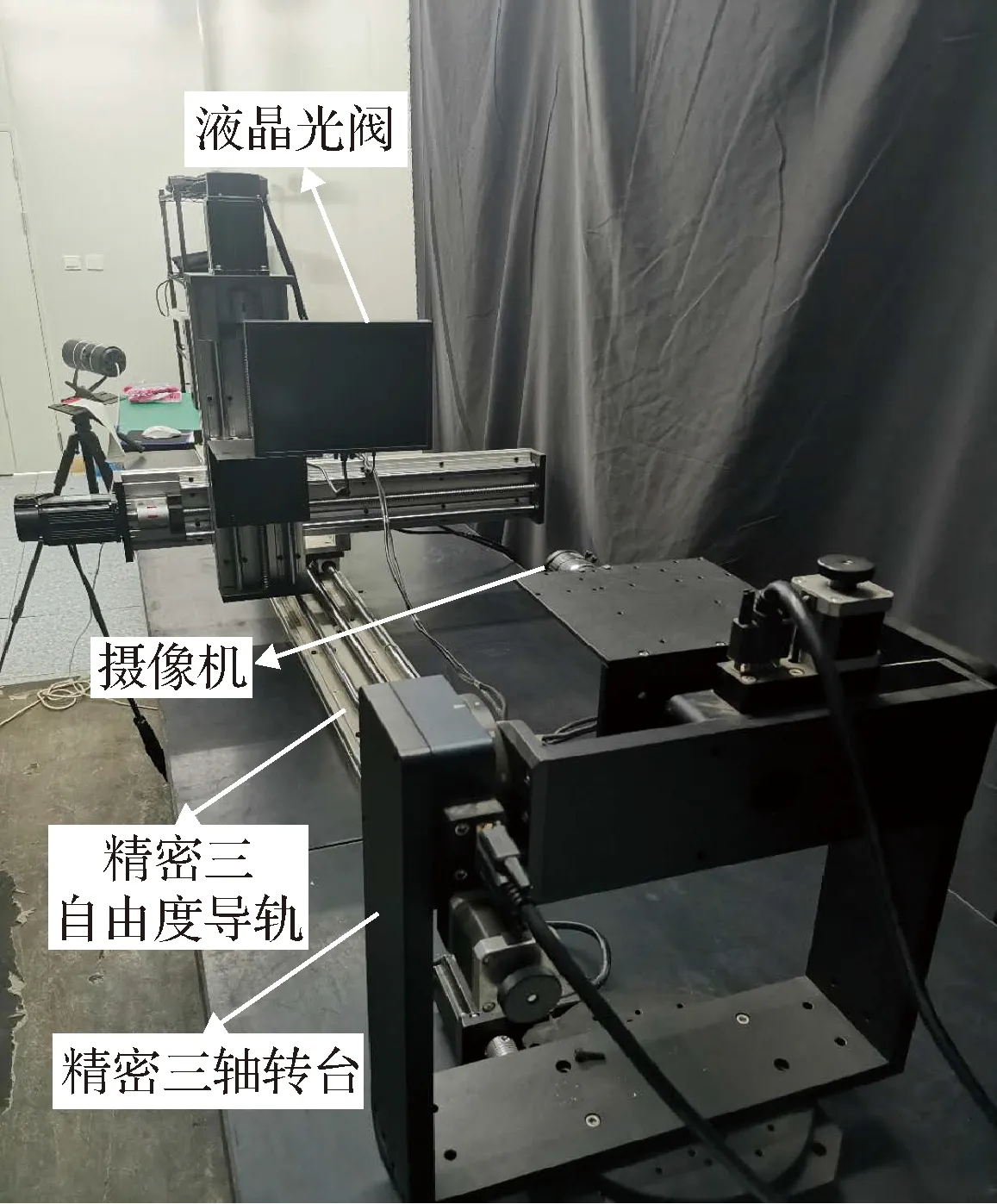
图5 地面半物理仿真平台Fig.5 The ground semi-physical simulation platform
3.2 试验测试和结果分析
该仿真校验过程主要在3种不同的轨道场景中进行,其主要仿真参数见表1,具体包括Case 1: 保持点相对运动轨迹、Case 2: 自然漂移相对运动轨迹和Case 3: 主从随动相对运动轨迹。这些轨道场景为主动星对空间目标交会接近过程中常用到的几种相对运动轨迹,覆盖了主动星从远距离交会至接近空间目标的整个过程。试验结果如图6~11和表2~4所示,其中表2~4显示了在3种轨道场景中,不同卫星姿态确定误差和相机测量偏差下的目标检测准确率;图(6、8和10)为仅测角相对导航滤波器在3种轨道场景中的相对定轨均方根误差(Root mean square error,RMSE);图(7、9和11)为仅测角相对导航滤波器在3种轨道场景中的相对运动轨迹跟踪结果。
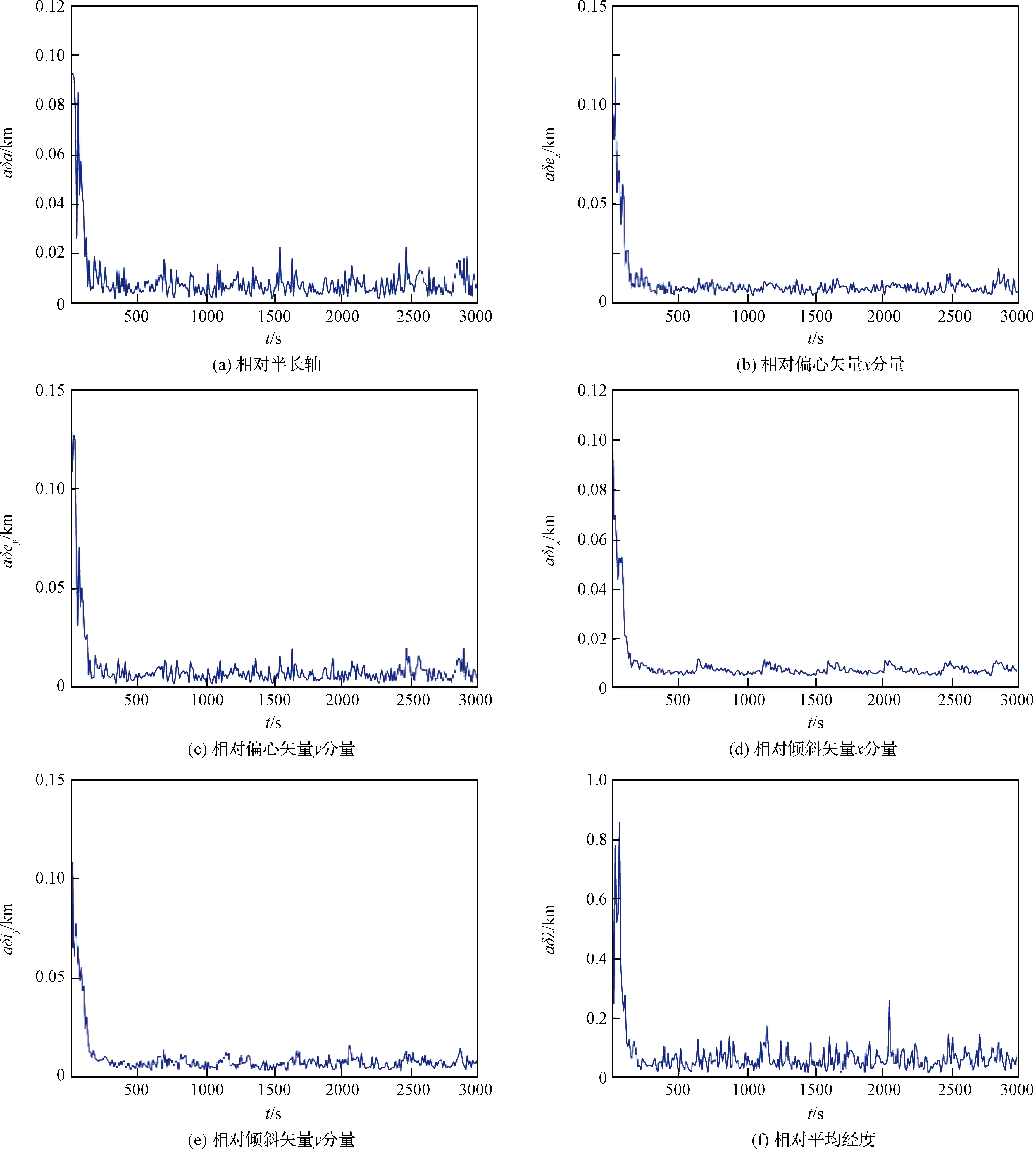
图6 Case 1的仅测角相对导航滤波器的相对定轨RMSEFig.6 Relative orbit determination RMSE of the angles-only relative navigation filter of Case 1
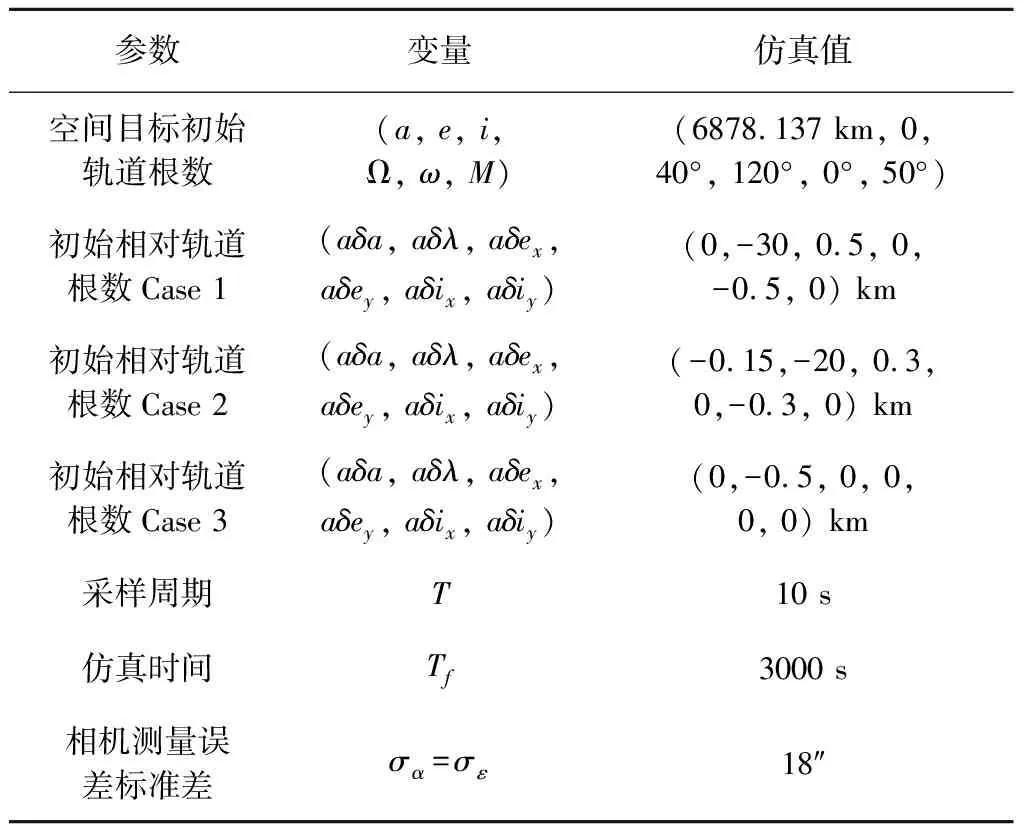
表1 主要仿真参数Table 1 Main simulation parameters
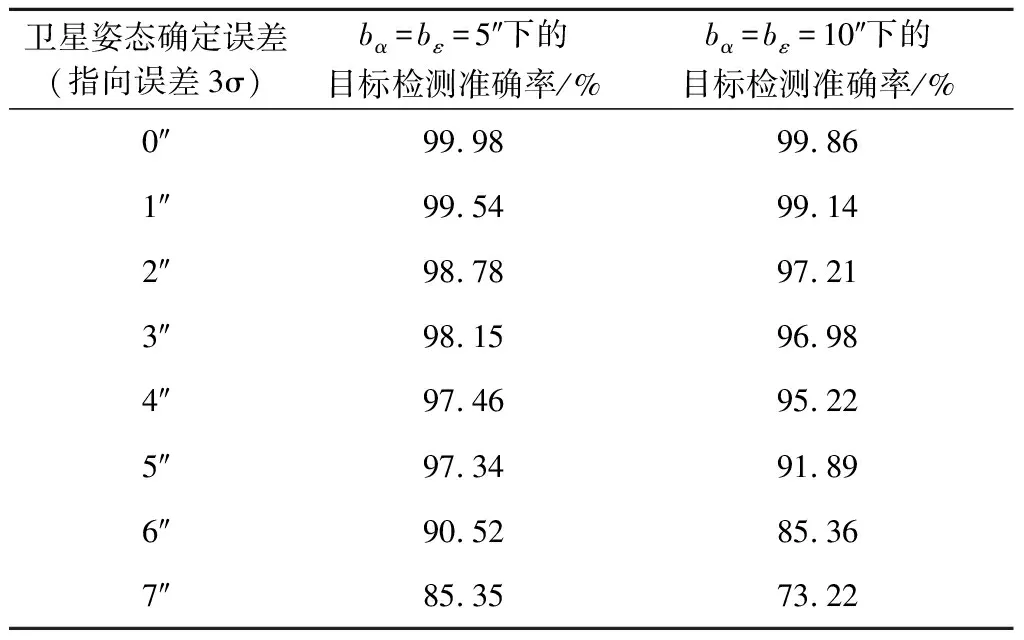
表2 Case 1的目标检测准确率Table 2 The target detection accuracy of Case 1
Case 1: 保持点相对运动轨迹
Case 2: 自然漂移相对运动轨迹

表3 Case 2的目标检测准确率Table 3 The target detection accuracy of Case 2
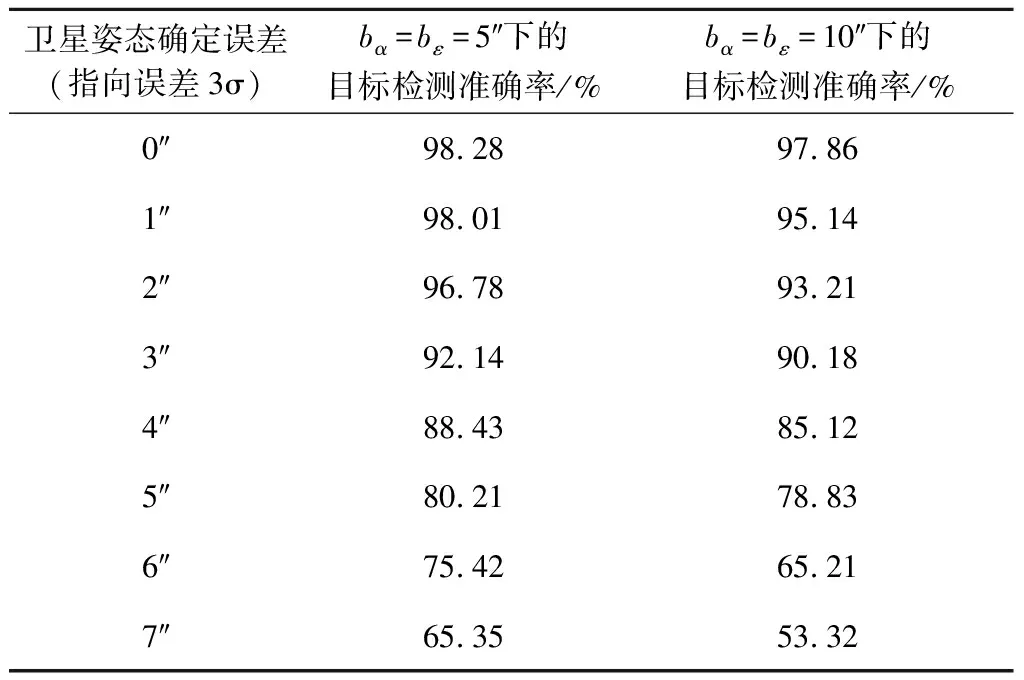
表4 Case 3的目标检测准确率Table 4 The target detection accuracy of Case 3
Case 3: 主从随动相对运动轨迹
根据表2~4,卫星姿态确定误差和相机测量偏差越小,目标检测正确率越高,在保持点轨道场景中,当卫星姿态确定的指向精度优于3″的条件下,该方法的目标检测正确率可达96%以上,但随着卫星姿态确定误差和相机测量偏差逐渐增大,目标检测正确率会下降,当卫星姿态确定的指向误差在6″以上时,目标检测正确率下降地尤为明显。因此,为了提高目标检测的正确率,主动星必须具备高精度的姿态确定能力。此外,在主从随动轨道场景中,该方法的目标检测正确率明显低于前两种轨道场景,这是由于在这种轨道场景中,空间目标在图像中的位置基本保持不变,这样很容把空间目标误判为相机热点,造成目标检测失败。
从图(6、8和10)中可以看出,设计的仅测角相对导航滤波器能够随着时间演化而成功收敛,滤波精度能够达到所测距离范围的1%以内。从图(7、9和11)中可以看出,设计的仅测角相对导航滤波器能够很好地跟踪主动星和空间目标之间的相对运动轨迹,但是在主从随动轨道场景中,仅测角相对导航滤波器出现了较大的误差振荡幅度,这是由于在主从随动轨道场景中,仅测角相对导航滤波器的可观性较差,可以通过进行适当的轨道机动(例如沿交叉轨道方向的轨道机动)来提高仅测角相对导航滤波器的可观性。
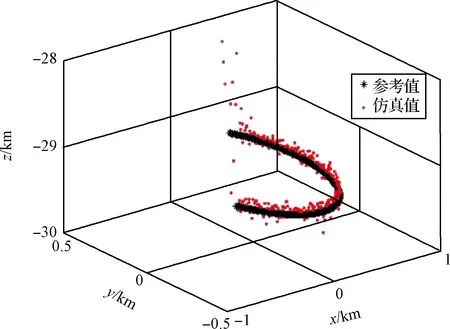
图7 Case 1的相对运动轨迹跟踪结果Fig.7 Tracking results of relative motion trajectory of Case 1
4 结 论
针对空间非合作目标交会接近问题,本文提出了一种空间非合作目标自主检测和跟踪方法,并通过地面半物理仿真实验得到以下结论:
1)在主动星高精度的姿态确定条件下,该方法能够准确从原始图像中检测出空间目标,但不同的相对运动轨迹会影响空间目标的检测准确率。例如,在主从随动轨道场景中,目标检测准确率明显低于其他两种轨道场景。

图8 Case 2的仅测角相对导航滤波器的相对定轨RMSEFig.8 Relative orbit determination RMSE of the angles-only relative navigation filter of Case 2
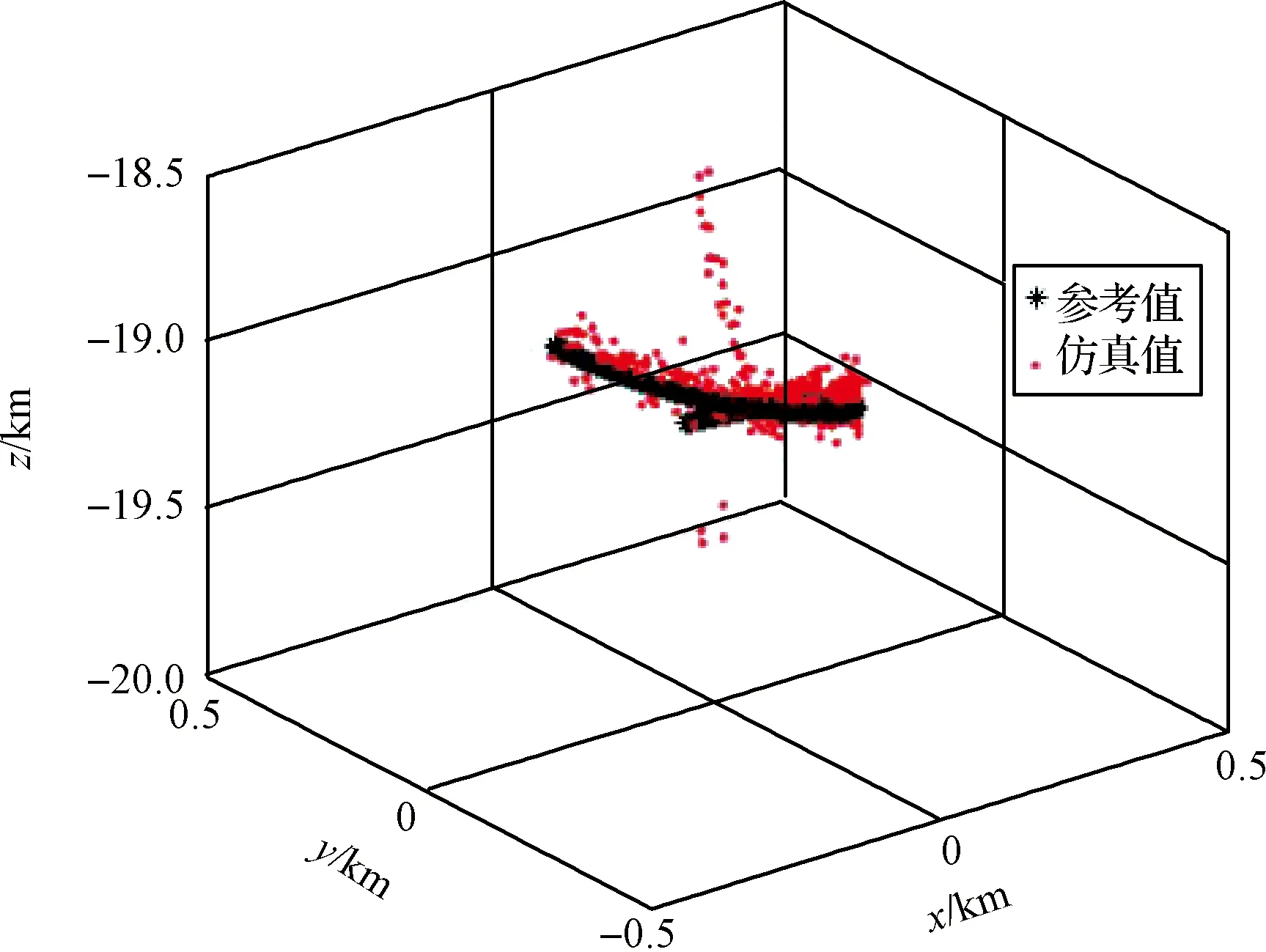
图9 Case 2的相对运动轨迹跟踪结果Fig.9 Tracking results of relative motion trajectory of Case 2
2) 利用扩展卡尔曼滤波基于相对轨道根数构建的仅测角相对导航滤波器能够实现对目标轨迹的精确跟踪,其相对定轨精度可达到所测距离范围的1%以内,但不同的相对运动轨迹会影响仅测角相对导航滤波器对目标轨迹的跟踪效果。
3) 本文所提出的非合作目标自主检测和跟踪方法需要主动星具备高精度的姿态确定能力。为了提高该方法在实际工程中的适用性,后续将进一步开展主动星低精度的姿态确定条件下,非合作目标稳健的自主检测和跟踪方法研究。

图10 Case 3的仅测角相对导航滤波器的相对定轨RMSEFig.10 Relative orbit determination RMSE of the angles-only relative navigation filter of Case 3
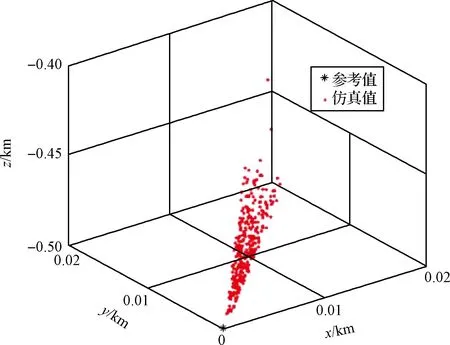
图11 Case 3的相对运动轨迹跟踪结果Fig.11 Tracking results of relative motion trajectory of Case 3