基于无人机的新型海水采集系统设计与实现
2021-06-24刘玉良陶良明刘宏升毛俊仁许明乐刘金椅
刘玉良,陶良明,董 平,刘宏升,毛俊仁,许明乐,刘金椅
(1. 浙江海洋大学 信息工程学院,浙江 舟山 316022;2. 浙江省舟山中学 科技创新中心,浙江 舟山 316001;3. 温州理工学院 设计艺术学院,浙江 温州 325035;4. 舟山商文机器人科技有限公司,浙江 舟山 316106)
近年来,随着工业污染及生活垃圾排放、海洋渔业养殖规模过度增加,近海海域水污染问题日益严重,海水温度、溶解氧、pH值等参数不断偏离正常范围[1],给养殖业等造成了巨额损失,因此需要对海水进行实时采集、检测和治理。目前海水采集以人工为主,一般为乘小船到现场采集,需要的人力物力较多,而且采集海水时覆盖面积小、效率低,部分水域还面临风大浪急、乘船触礁搁浅等危险[2]。目前,我国只有少部分海域启动了海水自动检测模式,即把海水采样监测设备固定在渔场的特定地点,一定程度上体现了自动化特点[3],但是仍存在采样覆盖范围小、采集地点变动不灵活等缺陷。用无人机参与海水采集能够充分发挥其便捷、灵活、高效等优势[4],为解决上述问题提供了新思路。无人机在陆上环境监测、农业、林业等领域已得到成功应用,积累了不少经验,为无人机在海水采集领域的应用研究提供了重要借鉴[5]。根据文献报道,一些地方已经尝试研制基于无人机的海水采集设备,但大多数是在无人机上挂载水瓶、水桶等简陋设备,密封性不好,很容易使海水样品在转移过程遭受二次污染,从而导致海水化验结果不准[6];另外,现有的设备使用了舵机、连杆、弹簧、阀门、水泵等,机械结构复杂,体形笨重[7-8],运动不灵活,可靠性也不高。基于此背景,本文研制了新型海水采集装置,依托无人机升降及控制装置完成海水采集任务,重点解决近海海域海水采集的准确性、灵活性等关键问题,旨在提高我国近海海域海水检测自动化水平。
1 海水采集系统的总体方案设计
本文设计的海水采集系统适用于近海海域,包括上位机和下位机,即无人机平台和海水采集装置,总体方案如图1所示。图1中无人机平台包括单片机、无人机本体及飞行控制器、电动绞盘、步进电机、独立电源等,设置独立电源是为了确保控制系统稳定;海水采集装置包括单片机、海水采集管、双头采集针、推杆电机、防水设备等,总体方案如图2所示。海水采集装置细分为海水采集管、双头采集针、控制器及通信设备等;海水采集管内部初始状态是真空或负压;双头采集针是由软胶管相连的内针头和外针头;外针头固定在采集装置外部下方,内针头固定在采集装置内部且初始位置跟采集管的密封橡皮圈对准。海水采集装置的内针头刺入采集管时,由于负压原理海水将从外针头沿着软胶管进入采集管;当内针头从橡皮圈拔出时,海水采集管将与外界自动隔离而停止采集海水,满足海水采集的密封性要求。
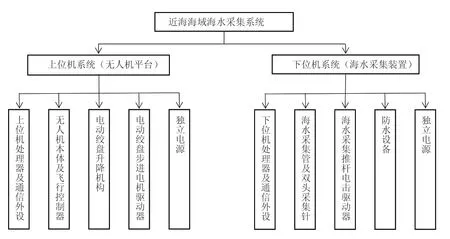
图1 海水采集系统的总体结构

图2 海水采集装置的结构、外观和截面图
海水采集系统工作时,无人机平台完成海水采集装置的输送与升降,而海水采集装置完成海水采集的启动与停止。设计要求是无人机平台能够在目标海域上方悬停,接到命令后将海水采集装置下降到海面,等待海水采集任务结束后,把采集装置提升并固定在无人机平台上,然后携带海水采集装置飞回到陆上的海水化验中心。海水采集装置收到由上位机下达的海水采集命令后,通过推杆电机推动针头前移,扎破负压采集针管的顶封橡皮圈而吸入海水。本文采集海水的动作命令由传感器触发,采集量达到要求后,传感器触发下位机发出结束采集的命令请求,然后由上位机反馈信号以控制推杆电机反转,将采集针头从采集针管的橡皮圈拔出,从而停止采集海水并使采集管自动密封。
2 机械结构设计
2. 1 海水采集装置的机械设计
本文的海水采集装置设计借鉴医学注射器的负压抽取原理,分为前端、中部和尾端3部分。工作时前端朝下,尾端朝上。前端由前盖和采集管构成(图3),在前盖上预留一个小孔,目的是使双头采集针外针头正好穿过前端而向下伸入海水。后端包括后盖和电池(图4),后盖底端的凹槽为固定11.5 V锂离子电池的位置,推杆电机及电池导线等均放于后盖。

图3 前端结构

图4 后端结构
海水采集装置的中间部分为核心部分,如图5所示,具体包括中盖、圆柱体夹具、推杆电机等。中盖上小孔跟前盖配合,为采集针刺穿采集管提供通道;中盖上预留的凹槽是为嵌入推杆电机预留的位置。本文的推杆电机相电阻为7.5 Ω,相电流0.5 A,工作电压12 V。安装时,先将双头采集针的内针头固定在推杆电机转轴上,再将推杆电机放入中盖的凹槽,最后将双头采集针的外针头从中盖的小孔穿出,伸到前端,便于由其前盖的小孔伸入海水。

图5 中间部分的结构
2.2 电动绞盘的机械设计
绞盘作为升降控制系统的核心组件,其原理是通过转动借助绳索使物体位置提升或降低,按照动力方式可分为液压绞盘、气动绞盘、电动绞盘等。本文由于升降力不大,同时考虑到安装及控制的简便化要求,选用了电动绞盘,其盘座、连接件等采用3D设计和打印,如图6所示。
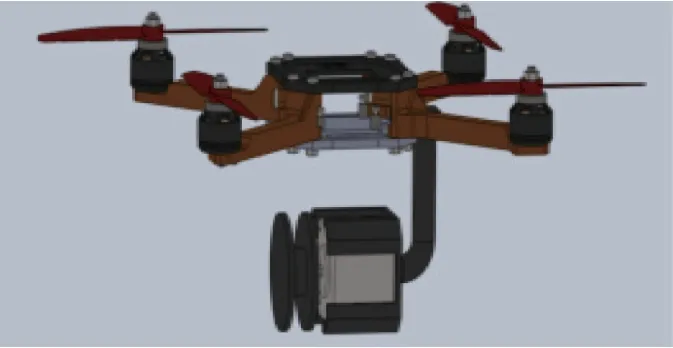
图6 无人机与电动绞盘连接示意图
3 控制系统设计
本文的控制任务包括无人机飞行控制、海水采集装置升降控制、海水采集启停控制等。其中,无人机飞行控制借用了无人机平台的自带功能,具体工作是无人机通信协议的研究与编程实现;而海水采集装置升降控制和海水采集启停控制,本文以单片机arduino promini为硬件核心,应用TB6612电机驱动模块,分别控制无人机上电动绞盘的步进电机和海水采集装置的推杆电机。本文的遥控终端应用乐迪AT9S型号航模遥控器,由它发出电动绞盘升降控制和海水采集启停控制的原始指令。原始指令通过无人机平台的开放通道进行通信,上位机和下位机之间通过zigbee无线串口模块通信。为便于软件升级、安装调试,本文控制系统采用了模块化设计思路,如图7所示。

图7 升降控制和采集控制原理图
3.1 控制方案简述
无人机控制的特点是:要求电机启动、停止、升降、转向等能够快速响应,而且要求电机体积小、力矩大、质量轻、抗干扰能力强、输出稳定等。本文权衡后选用步进电机,理由是尽力避免电机停转时吊起的装置滑落,另一理由是步进电机响应仅由数字输入脉冲确定,支持开环控制,电机结构简单且控制成本低。本文采用了两个步进电机,一个是固定在无人机上的4相5线制电机,用来控制绞盘转动即控制升降;另一个是微型2相4线制推杆电机,通过推杆的直线运动控制海水采集的启与停。
3.2 控制软件设计
本文的控制器Ardunio Pro Mini单片机只有单个串口,给通信和烧录切换带来不便,因此使用Software Serial库模拟串口通信。为提供编程效率,使用Arduino的内置步进电机控制库函数step( ),编程时仅需配置引脚和脉冲频率。无人机遥控器上还有可用的舵机接口,本文通过此接口给无人机发送信号,实现电动绞盘步进电机的正反转控制。电机控制基于脉宽调制PWM原理,无人机上舵机引脚与单片机I/O口相连,读取I/O口一个舵机基准信号周期的高电平占比,再判定高电平占比从而控制电机工作。本文的通信主机为无人机平台,其作用为读取遥控器发射的舵机信号,控制绞盘电机收放绞盘和发射状态码给下位机,下位机的作用是接受主机发送的状态码,控制海水采集装置的推杆电机,完成海水采集的控制。软件流程如图8所示。
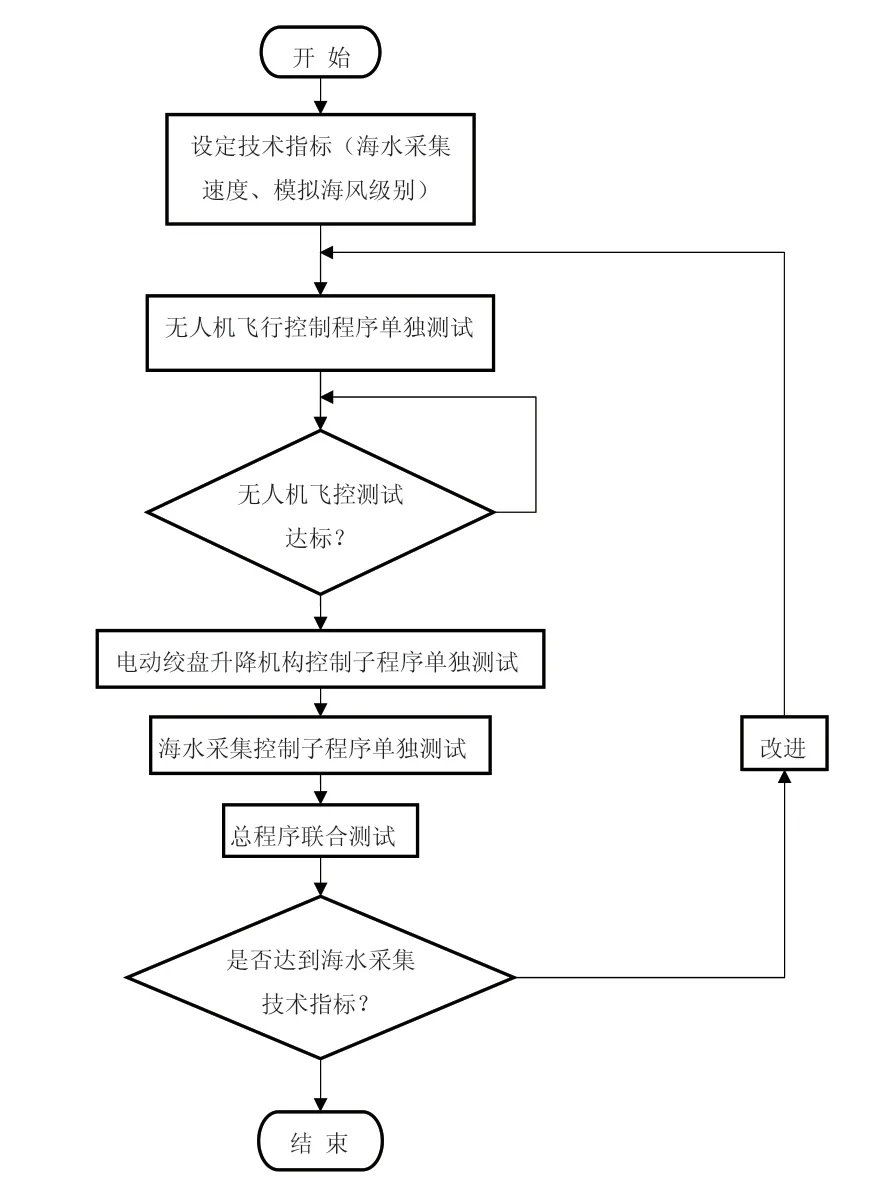
图8 海水采集系统的软件流程图
4 海水采集实验
海水采集实验系统组装起来后,上位机尺寸尺度大约400 mm × 400 mm × 440 mm,重量1.654 kg;下位机尺度约为200 mm × 200 mm × 300 mm,重量0.654 kg;功耗为1 500 mAh;无人机型号为S500四轴无人机pixhawk。实验时间天气条件均为阴天和多云,东南风或西南风5级以下,海浪高度0.1 m以下。课题组完成上位机和下位机的模块化设计之后,应用KeyShot软件进行了计算机仿真,如图9(a)所示。计算机仿真通过后,在浙江海洋大学智能机器人研究所进行了模块制作、组装,如图9(b)所示。然后进行室内调试和浙江海洋大学校园内的调试,最后在舟山长峙岛附近海域进行了现场测试和改进后的再次测试。在测试过程中,利用控制器面板上设有的遥控和自控切换按钮,支持遥控和自控操作,保证安全性和便利性。同时采用紧凑型四旋翼无人机平台,保证体积小、成本低的优点,便于后续推广。测试结果表明,采集过程无人机能够稳定飞行和悬停在海域上空,扣除无人机往返飞行等装备时间,采集5 mL海水平均用时15 s。借助无人机平台,能够稳定地实现海水采集设备的下吊、提升以及采集后海水采集设备在无人机上位置的固定;系统的续航能力为满载飞行时间10 min和遥控工作范围1.1 km。
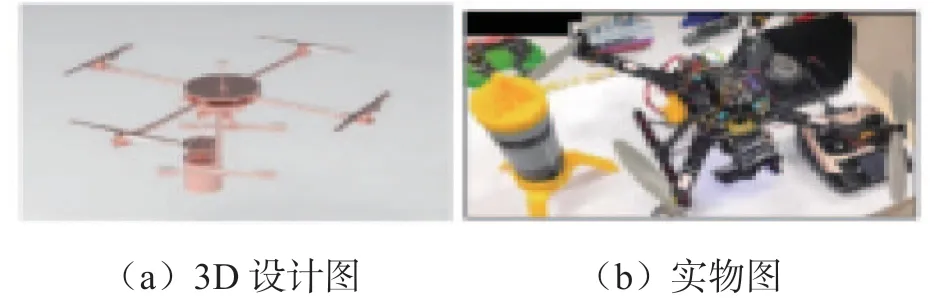
图9 海水采集实验装置
5 结 论
本文提出了基于无人机的新型海水采集方案,完成了上位机和下位机的设计、集成与测试,其中上位机控制支持遥控和自控两种方式。本文重点完成了海水采集设备的设计,该设备基于负压原理,保证海水采集的密封性即海水检测的准确性要求。最终改进后的系统在舟山海域单个采集点进行了5次测试,均取得了成功。目前存在的主要问题是无人机续航时间不够长、飞行抗风性不够强等问题,因此课题组将继续改进海水采集装置,以提高海面风浪增加后的工作适应性。目前由于设备尺寸及配重所限,只适应于浪高0.1 m以下的微浪,能够在大浪环境下稳定采集海水的第二代样机,将是下一步的研究任务。课题组还将更换大容量采集针管,并尝试在多个采集点进行测试,研究采集点位置切换时系统的工作稳定性和灵活性,以及引进机器视觉和智能控制算法[9-10],以进一步提高海水采集系统的自动化程度。
