全海深原位测试装置控制系统设计
2021-06-24解则晓迟书凯张凯彬
解则晓,于 平,迟书凯,张凯彬,叶 旋,韩 涛,贾 威
(中国海洋大学 工程学院,山东 青岛 266061)
海底沉积物是一种粉质黏土,对海底沉积物力学特性原位测试装置的控制精度提出了更高要求,且全海深沉积物原位测试与取样成本高、风险高[1],对全海深沉积物的研究工作将带来巨大困难。近年来,海洋开发领域由近海向远海、由浅海向深海不断推进。海洋水深范围在6 000~11 000 m的海域,被科学家称为“海斗深渊”,是地球上最深的海洋区域,海斗深渊是地球上人类迄今为止探索极少且又难以涉足主要地区之一[2-4]。目前,全海深领域的研究主要集中在美国、英国、日本等少数发达国家。提高深海原位测试工作效率、深海设备工作能力对我国经济、国防和科研的发展和进步有着至关重要的作用。截至2015年底,达到万米级水下无人探测装置仅有美国的Nereus HROV(“海神”号)和日本的Kaiko ROV(“海沟”号)[5],并且两个探测装置均在探索任务进行中丢失,可见万米以下深海复杂环境对水下探测装置的可靠性要求之高。为提高我国海洋科学实力,加快完善深渊科学领域,研制万米级海底原位测试装置的控制系统势在必行[6]。
海平面下,随着深度不断增加,温度降低、压力升高。对海底进行科学研究采用原位测试获得的数据将更能反映深海的实际环境,原位测试可以实地在线测量,获取在海底复杂环境下的测量数据及样品。由于深海环境存在复杂性和不确定性,使用无人水下探测装置进行深渊原位探测就成为了一种节约资源、方便安全的探测方式[7-8]。探测装置核心控制系统在整个装置的下降、作业、回收过程中起决定性作用。万米级水下的压力对于实验装置的抗压能力提出了非常高的要求,能够达到万米级的水下耐压舱体积较小,在完成水下作业任务所需携带装置数量较多的情况下,对整个装置进行设备分舱装配将提高装置的安全性和可靠性,装置分舱安置各个子系对于控制系统供电及通信可靠性设计将提出更高要求[9]。体积小的耐压舱所携带的供电设备体积也相对较小,对系统功耗提出了更高的要求。万米水深多选用无缆的布放方式,水上水下通信选用的水声通信技术尚不成熟,在整个工作过程中可能出现水声失联和数据丢包的情况,因此要求控制系统有一定的自主工作能力。同时对于深海复杂环境及装置环境,需要进行实时感知,为自主工作模式提供数据支持。然而,目前的深海测试装置在工作时对于不同的测试需要设计不同控制系统,这无疑会造成人力及财力的浪费。因此,寻求一种具备高可靠性供电、通信、感知、存储的全海深控制系统,对提高深海原位测试工作的效率极为重要。
本文从海底沉积物力学特性原位测试装置课题控制系统研发需求出发,研究设计了一种高可靠性控制系统[10],可以在全海深环境下完成原位测试工作,搭载不同种类传感器便于获得整个作业过程环境及外部数据,控制多路土力学探杆降低成本,提高工作效率,具有功耗低、可靠性高、体积小、易于维护、应用范围广泛等特点。
1 控制系统设计
本文设计的全海深原位测试装置控制系统是整个装置的控制中心,整个装置由为贯入系统传输动作指令的电机驱动舱、水上水下通信传输命令的水声通信舱、水下数据采集整合的采集仪舱以及整个装置的控制核心总控制舱构成。本文设计的装置下潜至万米级海底,进行土力学原位测试并完成实时数据采集工作。控制系统需对整个作业过程进行控制操作及状态检测,并对水下环境数据实时上传至上位机。系统搭载水声通信机、采集仪、贯入系统控制驱动以及装置进入海平面后完成所有状态检测工作所需的状态传感器。
装置从入水至最终完成作业任务后浮出水面总共需要经历甲板准备、下降、近底、坐底、上浮、浮出水面等不同阶段,每个阶段需要控制系统对整个装置进行不同的控制。由于全海深环境的复杂性和特殊性,可达万米水深的密封舱容量小,要求承载控制系统的电路板及供电设备体积小,因此采用高性能低功耗32位ARM作为系统主处理器,高集成嵌入式系统将简化系统结构、降低系统功耗、提高系统可靠性。控制系统作为装置“大脑”,连接的外部设备、传感器种类和数量较多,需要多种不同类型接口驱动。在设计上采用FPGA芯片,利用其硬件可编程特点实现灵活的外部接口扩展;利用其硬件可重构特点灵活应对深海环境复杂性及外部系统设计变更,使控制系统易于维护;利用其高速并行逻辑处理能力完成系统电源保护电路的设计以提高系统可靠性。
控制系统ARM处理器搭载温度、气压、压力、高度计、方位姿态等传感器获取装置运行的外部及内部状态信息,搭载土力学采集仪对海底原位测试数据进行解析与处理[11]。水面上位机通过水声通信机实现水下与水上控制命令的传输与信息交互。控制系统FPGA对贯入系统电机、抛载电机和控制探杆启停的四路电磁阀分别进行控制[12]。控制系统舱内设置独立供电模块,为控制系统及部分外接系统提供供电[13]。控制系统方案设计如图1所示。
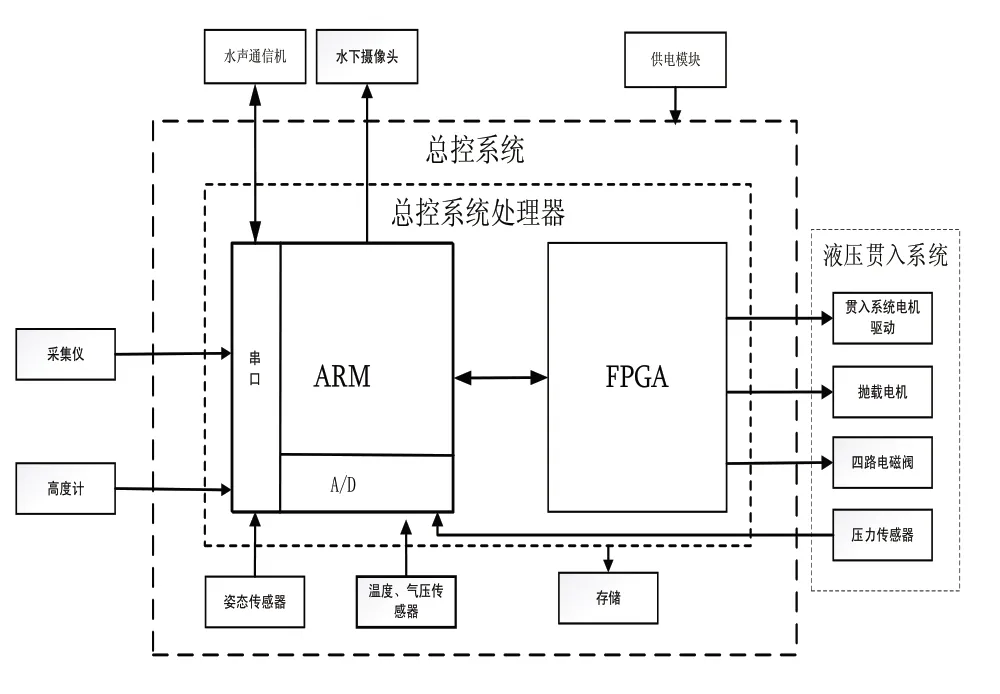
图1 控制系统方案设计
1.1 供电设计
采用安置在舱内的24 V锂电池及板载稳压模块对系统进行供电,对于不支持宽压输入设备采用经过稳压模块的24 V稳压供电,减少变压损耗,提高电源效率[14]。24 V电压进入控制系统为整个控制系统内部、深海环境感知的摄像机、深海高度计、方位姿态传感器、温度气压传感器等及原位测试装置其他密封舱内子系统提供供电及控制。由于控制系统内部及外设子系统供电要求不同,控制系统电源控制模块采用TPS54541与LTC3621芯片对锂电池输入的供电进行两次降电平处理,将24 V电压降为12 V, 5 V, 3.3 V,分别为控制系统内部各个模块及外接系统提供供电。控制系统供电设计如图2所示。

图2 控制系统供电设计
控制舱内所带供电锂电池体积较小,装置从入水至浮出水面整个工作时长对系统供电提出更高功耗可控的设计要求。系统供电设计采用模块化的设计方式并且在每个供电模块中加入可控开关,按照功能分块后,系统在装置不同运行状态时对不同功能模块控制供电,保证系统功耗可控。装置抵达海底后进行原位测试,控制系统通过控制供电的方式有选择性为四路电磁阀供电,电磁阀上电吸合后对应一路探杆贯入方向向下,控制系统以此方式控制整个原位测试过程顺利进行[15]。
原位测试装置采用分舱安置子系统的设计,在全海深极端背景下,这一设计要求控制系统为部分外部系统供电时要有更高的可靠性,且要确保控制系统电源不受外部系统故障及其他密封舱漏水短路等对总控舱造成的影响。
控制系统对外接系统供电时,部分外接子系统设备和外接传感器功耗较低,控制系统直接采用DC/DC隔离模块保护供电[16],隔离输出控制供电电路如图3 所示。高度计、电磁阀等运行功耗高或瞬时电流较大的外部设备采取FPGA高速逻辑中断保护,控制系统设计实时监测电压、电流电路,将检测到的信号发送至A/D模块经处理后传送至FPGA中,保证控制系统实时掌握系统各部分电路电流电压值,一旦发生过流、过压,将立即控制断电。高速逻辑中断保护电路如图4所示。
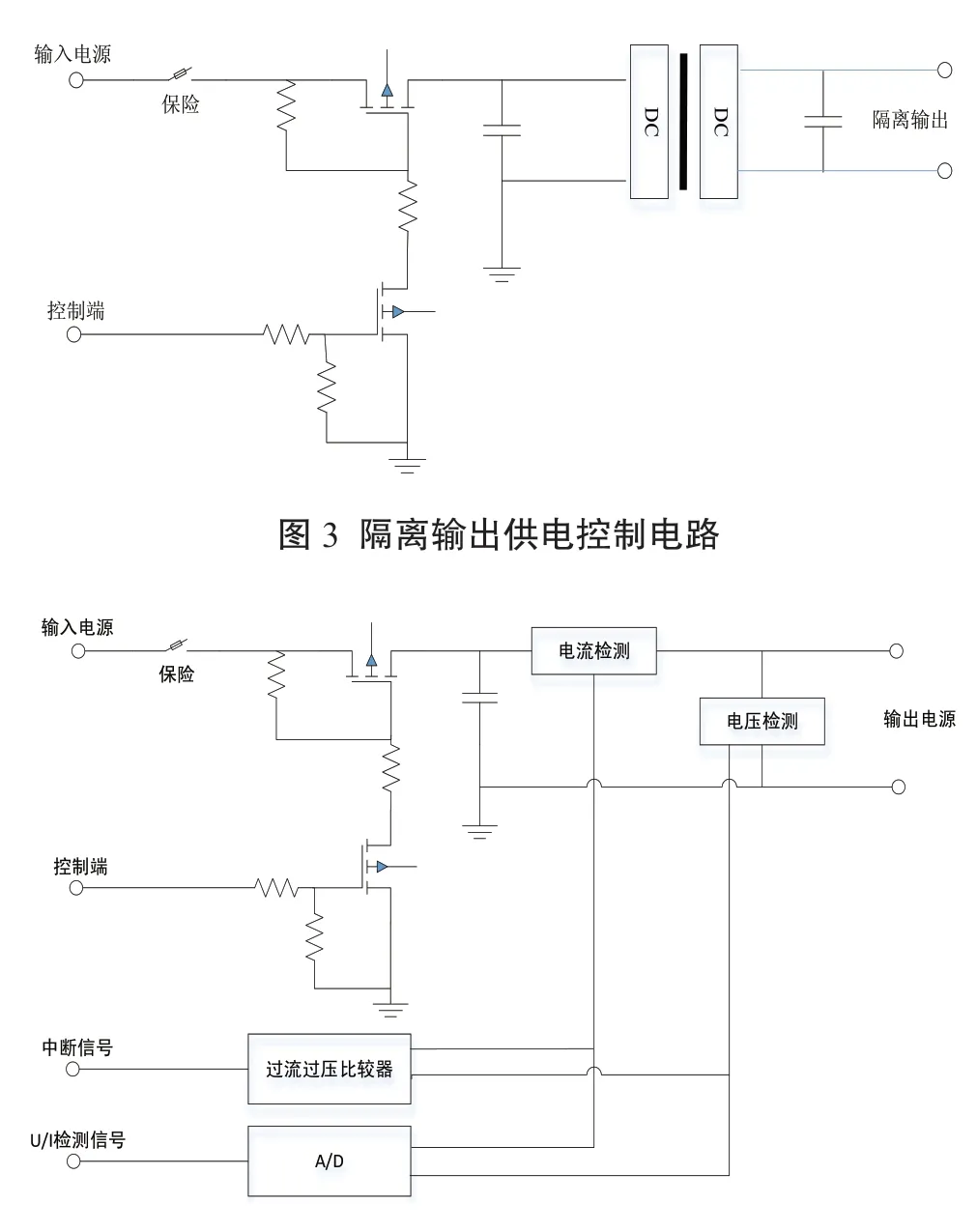
图4 高速逻辑中断保护电路
1.2 通信设计
原位测试装置整体体积较小,密封舱之间间距较近,控制舱外接设备种类较多。控制系统在装置整个工作过程需完成对其他舱内设备的控制任务,与系统内部进行参数信息交互及控制命令的发送。系统设计短距离、应用广泛的RS-232串口通信方式。控制系统通过RS-232与外部系统:土力学采集仪、贯入系统电机驱动等进行控制命令发送、接收控制系统的漏水传感器、方位姿态传感器、深海高度计回传的装置外部及内部状态信息。
控制系统通过水声通信机与水面上位机进行数据传输,水面上位机可以对水下控制系统进行实时控制,从而实现水上水下的信息交互。控制系统在整个水下作业完成后对抛载电机发出启动控制命令抛去负载装置上浮至水面完成回收工作。系统同时设计外接RS485、CAN总线等外接扩展板可满足多种子系统通信方式[17]。
控制系统与外部所有子系统和传感器的通信均采用隔离传输保护,隔离各子系统间的信号干扰,保障控制系统不受外部设备故障影响。分别采用隔离串口、隔离变送的方式实现了对信号的物理隔离和可靠传输,保障系统与外部系统的通信和传感信号可靠传输,提高系统可靠性[18]。隔离串口、隔离变送电路设计如图5和图6所示。

图5 隔离串口电路设计图
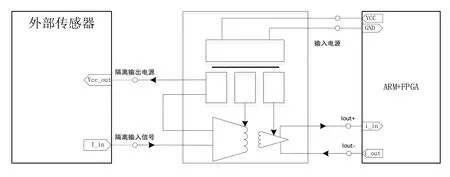
图6 二线制隔离变送电路设计图
1.3 感知设计
控制系统分别对全海深环境状态、原位测试装置状态、主控舱舱内状态、总控板状态分别进行感知设计。针对环境状态感知系统设计水下摄像机及压力传感器,装置入水后控制系统可以阶段性控制外接摄像机采集深海的环境图像数据并将图像信息保存于内置SD卡中。随着下潜深度增加压力升高,子系统中压力传感器将采集的压力数据值返回至ARM,经ARM中A/D处理后获得装置下落大致深度。
针对装置状态控制系统采用KONGSBERG MARITIME(挪威康斯伯格海事)生产的深海高度计获取装置离底高度,高度计的有效测量范围为0.8~300 m,控制系统将通过高度计回传的数值判断装置运行至近底、坐底阶段,当高度计回传数值为0.8 m并且数次不变后,代表装置已到达海底,控制系统可以控制开始原位测试作业任务。装置整个下落过程除依靠重力作用无外加动力控制,控制系统的姿态传感器将采集装置入水至回收全过程的三维姿态信息并通过RS232串口发送至ARM中,经处理后通过水声通信机上传至上位机[19]。
针对总控舱舱内状态,控制系统设计的温度、气压传感器将采集到的温度及舱内气压数据发送至ARM处理器。控制系统设计了漏水比较中断,一旦舱内出现漏水情况将及时发送信号至ARM处理器,ARM将立即发出抛载信号,防止整个系统瘫痪后装置无法回收。针对总控板状态进行设计,系统设计多处电流电压检测电路对系统内部的电流、电压进行采集。控制系统感知设计如图7所示。
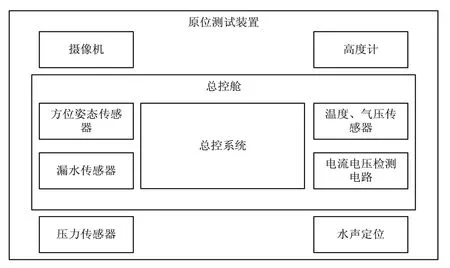
图7 控制系统感知设计
1.4 数据采集及存储
装置在下降、近底、坐底、上浮等阶段均将舱内温度、舱内气压、外部压力、近底高度、环境图像及土力学采集的数据等信息直接传送至ARM或通过FPGA传送至ARM进行处理。多种传感器的采集信号种类不同,而ARM只能处理0~3.3 V的电压信号,因此系统设计A/D采集模块对传感器回传信号进行进一步处理。本系统设计了SD卡和CF卡双介质独立存储备份,装置入水便开始进行实时数据的采集,采集的数据除通过水声通信机上传至上位机外,同时直接存入控制系统的SD卡及CF卡中,保证整个作业任务收集的数据完整可靠。
2 控制系统工作模式设计
为应对万米水声通信技术可能存在的失联及丢包的现象,控制系统设计多种工作模式以确保原位测试任务顺利完成。控制系统工作过程为上位机下发控制命令给系统中ARM处理器,ARM处理器发出控制命令,控制各个子系统完成作业任务。控制系统工作模式设计如图8所示。
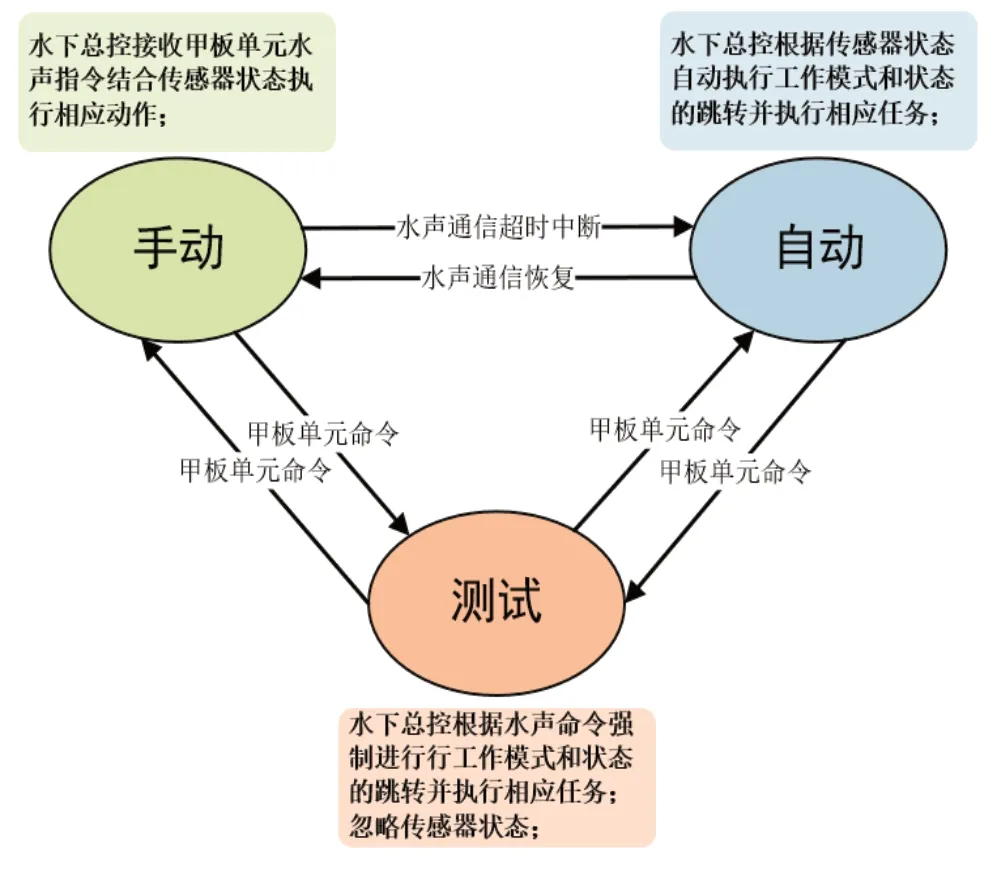
图8 控制系统工作模式设计
2. 1 手动模式
装置入水后以手动控制模式为主,控制系统内部程序设计为定时将采集到的传感器及采集仪数据以数据包的形式通过水声通信机向水面上位机发送,水面上位机接收到数据包后向控制系统发送数据成功接收指令,控制系统以在一定时间内接收到上位机发送的指令来维持手动模式。手动模式下控制系统由水面甲板操作人员通过上位机显示的状态数据对控制系统发送控制指令,控制装置及外部子系统完成作业任务。
2. 2 自动模式
控制系统超过一定时间接收不到水声回传指令将控制模式由手动模式切换至自动模式,当水声通信恢复后系统将自动切换回手动模式。自动模式下,控制系统根据传感器回传状态数据自动执行工作模式和状态跳转并完成水下作业任务。
2. 3 测试模式
控制系统为装置联调及水面准备阶段设计测试模式,测试模式下,控制系统将忽略水声通信的超时回传及传感器状态,控制系统通过上位机发出动作指令强制执行动作指令及子系统控制。
3 系统监测设计
为确保原位探测装置能够准确、可靠地完成布放及回收,对系统监控的设计至关重要。控制系统将原位探测装置从装置入水至作业任务完成后浮出水面设计为甲板准备、下降、近底、坐底、上浮、浮出水面6个工作状态,每一工作状态控制系统ARM处理器将包括水下舱外环境状态、装置状态、舱内状态、总控板状态等数据的数据包经水声通信机实时上传至上位机,以便上位机对海底情况实时监测。
3. 1 控制系统状态检测设计
原位探测装置在控制系统及水声通信机在甲板单元上电初始化完成后投放,装置入水后通过上位机下发指令为深海高度计上电,高度计上电后将以秒为单位向控制系统ARM处理器发送装置离底高度数据。同时控制舱内方位姿态传感器、温度气压传感器及舱外的压力传感器将实时采集的数据传送至ARM中,经ARM处理整合成数据包每隔1 min经水声通信机发送至上位机。
3. 2 水面上位机设计
探测装置完成一系列作业任务均需上位机与控制系统的信息交互来实现,水面控制软件是上位机和控制系统的重要实现接口,其主要功能有:监控探测装置各个子系统的工作状态,读取控制系统各传感器回传状态数据并显示,对水下各个系统发出供电及控制命令,保证作业任务顺利完成。
根据探测装置作业要求及控制系统设计需求,采用北京昆仑通态自动化软件科技有限公司(MCGS)上位机进行设计,上位机监控及控制界面如图9所示。
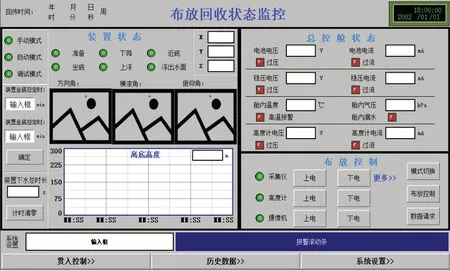
图9 上位机状态监控界面
上位机主界面设计总控舱内总控板电流、电压、温度、气压监测数据,可提供操作员实时查看舱内状态。左侧显示装置所处阶段,方位姿态传感器回传的装置运行姿态及高度计回传的装置离底高度,并显示控制系统此时所处于的控制模式。右下方为装置布放控制中采集仪、高度计、摄像机供电控制界面及控制模式切换。装置坐底后贯入控制界面如图10所示。

图10 贯入控制界面
贯入控制界面设计分为贯入状态监控及贯入控制。贯入状态有探杆贯入行程监测,包括贯入深度,十字板转动角度、剪切力强度,电磁阀总电流及液压舱内压力传感器回传压力值。贯入控制有贯入系统四路电磁阀启停控制按钮,三路电机启动停止按钮,以及四路探杆贯入深度阈值设定。
4 系统测试
根据水下密封舱内部空间尺寸进行设计,为减小空间,控制系统电路板层数设计为6层,控制系统实物总控板如图11所示。总控系统电路板从装置各系统实际安置位置设计总控板各模块位置。控制系统总控板主要包括ARM+FPGA的核心模块、供电模块、状态感知模块、通信模块以及数据存储模块。
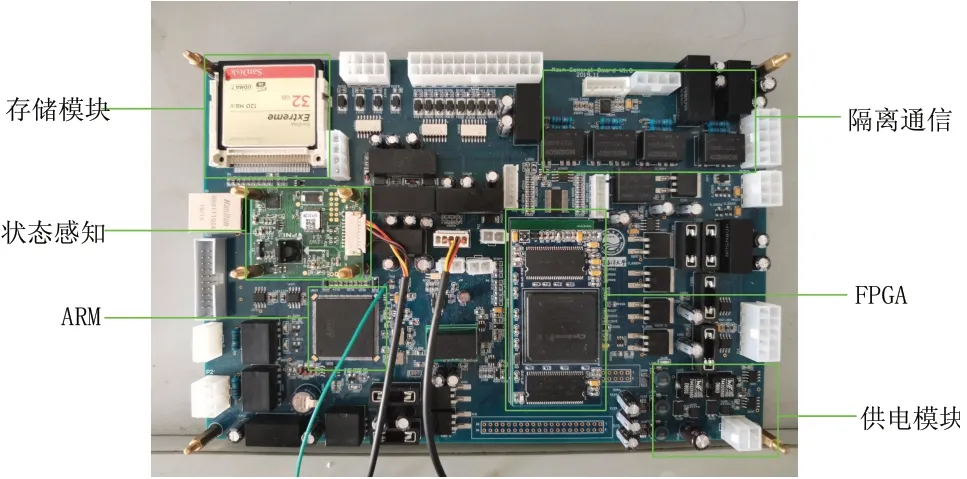
图11 控制系统电路板
控制系统分别外接单独子系统:水下摄像机,电磁线圈等。通过上位机发送供电指令,在控制板对应外接端子处均可测得设定的电压值。外接子系统均可获得额定电压,摄像机、电磁线圈可以正常工作,系统功能测试实验如图12和图13所示。
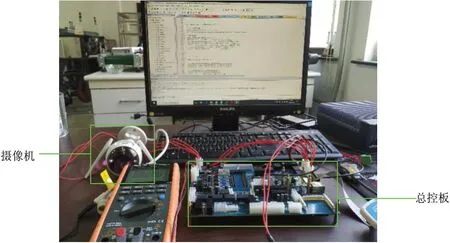
图12 摄像机功能测试
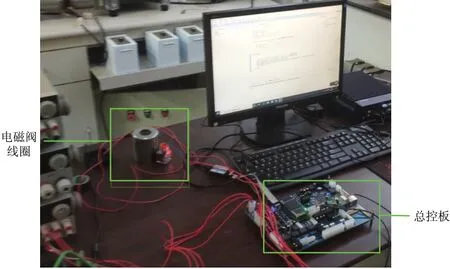
图13 电磁阀功能测试
图中摄像机可由上位机发送启动命令,控制系统接收到命令后为摄像机供电,摄像机进入工作状态将图像信息存储至内置SD卡中,可通过读卡器读取图像信息。根据课题需求,将控制系统电磁阀端子外接24 V/35 W电磁线圈进行实验,通过上位机控制总控板为电磁阀供电,检测电磁阀端子电压及电流均为额定值,分别将电磁线圈与每一路电磁阀外接端子相连并进行30 min通电实验,实验结果表明,电路设计合理MOS管过电流能力较强。
控制系统通过串口线直接与上位机连接进行信息传输及控制命令的接收,与采集仪及贯入电机驱动通过串口线相连进行信息采集与启停命令的发送。控制系统可以接收到上位机发送的控制指令并作出对应控制命令的发送,ARM及FPGA均可实现采集仪信号的接收和对贯入系统电机的驱动命令下发。
控制系统在系统上电后设置舱内外环境数据自动上传至上位机界面显示,其中包括温度、气压、高度计、方位姿态等传感器获得的数据。控制系统均可采集到每一个设计的传感器回传的数据并经过解析后上传至上位机显示。
为确保控制系统可以在装置运行及工作的过程完成对装置各子系统控制功能的实现,进行系统联调。调试过程将水面上位机、贯入系统、采集仪、高度计、方位姿态传感器均与控制系统连接,通过上位机对控制系统发送控制命令,控制贯入系统电机启停、土力学探杆贯入,系统接收状态传感器回传的数据解析后上传至上位机显示。全海深原位测试装置如图14所示。
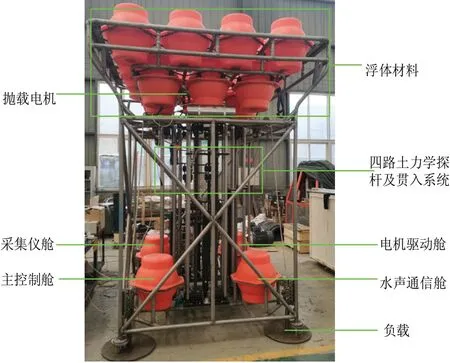
图14 原位测试装置实物图
整个装置顶部放置浮体材料,装置完成作业任务后抛载电机启动抛去底部负载,装置在浮体材料作用下上浮至水面完成装置回收工作。装置中间为四路电磁阀控制的四路土力学探杆及贯入系统,装置底部四个浮球别为主控制舱、电机驱动舱、采集仪舱、水声通信舱。
系统联调过程,贯入电机启动后,土力学探杆已具备贯入动力,对应探杆的电磁阀导通后探杆向下贯入。通过上位机发送控制指令,控制系统可以顺利对贯入系统各个电机发出启动和停止动作指令,控制电磁阀通断进而控制对应土力学探杆贯入及拔出,实验数据见表1。

表1 电磁阀启停测试
测试过程中检测总控板电池电压、电流及电磁阀供电端子电压、电流以保证总控板及电磁阀安全。总控板未给上电时,检测电池电压为23.9 V,电流为307 mA,电磁阀供电端子电压电流均为0,探杆处于静置状态。上位机发出电磁阀启动指令后,总控板电池电压为24.3 V,总电流为1 832 mA,电磁阀电压为23.9 V,电流为1 524 mA,探杆启动,向下贯入。上位机发出电磁阀掉电指令后,总控板电池电压、电流均回到初始状态,电磁阀电压、电流变为0,探杆向上提起至最高点。实验数据表明,上位机可以控制总控板对电磁阀做出启停控制,进而控制土力学探杆贯入或拔出。电磁阀测得的电流在电磁阀额定电流范围内,表明控制电路设计合理。
经系统联调测试,控制系统可以实现对于外接子系统控制命令的下达、通信传输等功能。
5 结 论
本文设计了一种针对全海深极端条件下原位测试装置的基于高性能控制器ARM+FPGA的控制系统,将ARM、FPGA的优势及特点结合起来应用到全海深原位测试当中,FPGA硬件可重构的特点使系统在装置分舱的情况下易于维护,实现了水下控制系统进入全海深领域。系统设计搭载的高度计、姿态、温度等传感器的使控制系统实时感知深海环境,通过上位机获取装置运行状态并判断装置所处工作阶段,能够使实验装置完成全海深环境下的目标任务。控制系统采取隔离的方式与外部系统通信、供电,提高了水下控制系统在分舱情况下的可靠性。数据采集与存储采取实时上传和内置存储器两种方式保证实验数据的安全性。多种接口电路、通信方式、供电设计使控制系统可以应用于多种水下作业任务,提高了系统通用性及可拓展性。
