基于改进全阶滑模观测器变频空调电动机转速辨识研究*
2021-06-23珠海格力电器股份有限公司陈万兴梅正茂方小斌唐海洋
珠海格力电器股份有限公司 陈万兴 梅正茂 方小斌 唐海洋
0 引言
相比传统空调用电动机运行抖振频率±3.0 Hz满足恒温调湿要求,变频空调在降低出风含湿量的同时控制出风温度,其方案如图1所示。相比于风冷散热,风冷和水冷散热相配合可减小冷凝换热温差,从而达到降低系统冷凝温度的目的,提高性能系数,全工况满足出风含湿量≤8.0 g/kg、温度16~30 ℃可调。变频电动机调节制冷剂流量,按需输入除湿量,双冷凝器并联,通过双电子膨胀阀调节制冷剂流量配比,按需输出再热量,减少机组能耗,因此电动机运行抖振频率精度严重制约高效恒温除湿性能。

图1 变频空调双冷源水冷方案
为了减小变频空调频率抖振幅度,提升电动机转子频率精度,精准控制新风出风温度和含湿量。在常用运行转速时,满足变频风机转频的2~8次谐波频率不落在风机的固有频率上,风机转速2 600 r/min,离心风机转频43.32 Hz,叶频(叶片数×转频)216.51 Hz,结构七阶模态频率249.39 Hz的要求。
本文分析了传统的滑模观测器方程,引入反电动势作为状态变量,构建了全阶滑模观测器,分析反电动势的状态表达,去除了低通滤波器环节,避免滤波器带来的相位延迟和补偿不准确的问题。构建变增益的切换函数,改善了系统抖振问题。实验表明,本文所提出的方案可以更准确地辨识电动机位置,转速辨识具有较好的稳态特性。实现频率精度控制在0.2 Hz以内,保证其运行时的高效恒温除湿性能。
1 传统滑模观测器速度辨识问题分析
通过滑模观测器的观测电流和实际测量电流构建滑模面,经过滤波处理后得到反电动势,再由反电动势计算出电动机位置和转速,代替速度传感器。
根据永磁同步电动机的数学建模方程,可以列出在静止坐标系下电动机的电压方程:
(1)
式中U、E分别为定子电压和反电动势电压,V;Rs为定子电阻,Ω;p为微分因子;L为定子电感,mH;ωe为转速,r/s;I为电流,A;下标α、β、d、q分别代表α轴、β轴、d轴和q轴。
可以得到反电动势的表达式:
(2)
式中θe为转子角度,°;Eex为反电动势幅值,V。
根据式(1)、(2)可以得到以电流为状态变量的状态方程:
(3)

Z为由滑模面估算的反电动势,其表达式如下:
(4)

按照式(3)、(4)构建的滑模观测器系统如图2所示。

图2 反电动势观测器
(5)

(6)
滑模观测器结构简单、鲁棒性强、系统易收敛,但是传统的切换函数滑模面存在高频抖动的问题,因此,在观测的反电动势上需要增加低通滤波器,通过观测转速去补偿低通滤波器带来的相位延迟。电流误差开关量中包含了相对较低频率的反电动势信号,但同时包含了开关函数引起的高频切换信号,所以需要将这部分高频信号滤除掉,只保留有用的反电动势信号,可以选择使用低通滤波器来实现。低通滤波器的传递函数如下式所示:
(7)
式中s为拉普拉斯算子;ωc为低通滤波器的截止角频率。
2 全阶滑模观测器设计
2.1 全阶滑模观测器状态方程
全阶滑模观测器系统如图3所示。
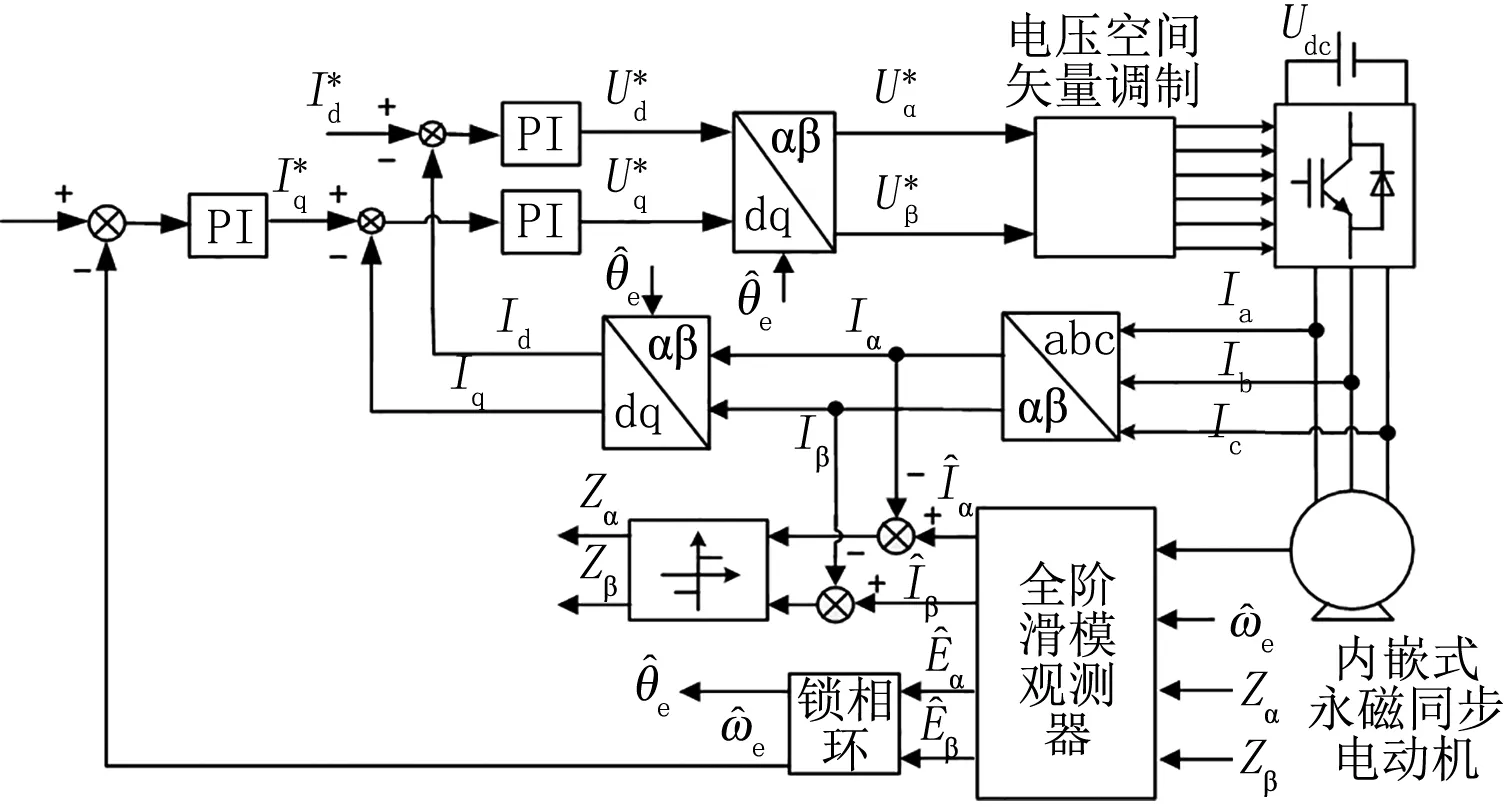
图3 基于全阶滑模观测器的速度辨识系统框图
在电动机控制系统中,转速的变化率比起电流的变化率要慢很多,所以转速的变化率近似为0,电动机反电动势的变化率表达式如下:
(8)
将电流、反电动势作为观测变量,并以计算出的电动机电角速度代替真实电动机电角速度,得到下面的观测方程:
(9)
式中I′为观测的电流;E′为观测的反电动势。
其中
A′计算式中ω′e为观测的电角速度。
由于反电动势的测量比较困难,所以无法作为校正反馈项。定子电流的采样测量是电动机控制器中的重要部分,其测量精度较高,很适合作为状态观测器的校正反馈项,根据自动控制理论中的全阶状态观测器的误差补偿理论,在上面的观测矩阵的基础上,采用定子电流误差构成的滑模面来作为校正项(误差补偿器)。
那么系统状态方程就变成:
(10)
式中G为补偿矩阵。
(11)
电流误差构成的滑模面为
(12)
由于转速的波动相对于电动机的电磁时间系数较低,可以近似为恒定值,得到观测反电动势与实际反电动势的误差方程表达式如下:
(13)
式中E*为静止坐标系下的反电动势误差。
当系统进入滑模面时,观测电流很接近真实电流,电流的观测误差为0,根据状态观测矩阵,反电动势的误差值可以表示为
(14)
得到反电动势的误差方程为
(15)
从上述表达式可以看出,反电动势已经包含了卡尔曼滤波器中的预测和校正环节,所以不需要再对观测的反电动势进行额外的滤波,从而消除了对相位的补偿。
2.2 自适应反馈矩阵系数设计
反馈矩阵的值决定了系统是否收敛,并且决定了收敛的速度,那么利用小信号分析理论的知识,可以对全阶滑模状态观测器进一步分析,得到反馈矩阵选值的范围及规律。
基于滑模面在静止坐标系α轴系下的电流方程:
(Uα-E′α)+[-KZ(I′α-Iα)]}
(16)
观测电流和实际采样电流的跟踪关系是分析电流方程中的重要环节。因此,可以将电流误差值作为正定表达式:
V=(I′α-Iα)
(17)
忽略其中的电阻项,并假设静止坐标系β轴系下的电流估算与实际电流一致:
(18)
已知,系统如要收敛,正定表达式的要求为
(19)
那么系数K需满足:
K>|Eα-E′α|
(20)
再分析反电动势的观测方程:
(21)
将上式重写成状态函数如下所示:
(22)
(23)
化简归一后,得到如下方程:
(24)
从式(24)可以看出,其基本结构与标准的二阶振荡方程很接近,所以在工程上,可以采用二阶振荡的特性来近似,标准二阶振荡方程的表达形式如下:
(25)
式中ξ为阻尼比;ωn为自然振荡角频率。
(26)
(27)

(28)
经过以上理论分析,可以得到反馈矩阵系数的取值趋势,传统的取值方案是取较大的值覆盖各种工况要求,保证系统的收敛性及稳定性。
图4显示了系统在滑模面上运动的轨迹,可知,当切换系数很大时,系统每次都会离滑模面较远,下次再穿越滑模面去到另一边,这会带来较大的高频抖振。

图4 系统切换函数x(t)在滑模面上运行的轨迹
本文在保证系统收敛的前提下,通过上述分析,设计了一个反馈系数自由化。当系统刚启动时,由于观测的反电动势还未跟踪上真实的反电动势,所以其误差较大,需要较大的K值使系统稳定(K=K0),在系统稳定后(时间t>t0),观测器观测的反电动势已经跟踪上实际的反电动势,此时可以降低K值(K=K1)。但是为了系统依旧收敛,同时考虑电流误差的影响,当电流误差较小时,系统收敛较好,观测器跟踪较好,所以此时可以使用较小K值(K=K2)来减小系统抖振;当电流误差较大时,系统观测效果差,可能会发生不收敛,所以采用较大K值(K=K3)来使系统稳定。最终的K值选取这2种取值中的大值,并且K值的变化都需要考虑切换的顺滑性,切换示意如图5、6所示。

图5 K随时间t的变化

图6 K随电流误差Eer的变化
再利用观测的转速来实时更新系数K,使得系统工作在最佳欠阻尼状态,提高了系统的鲁棒性及稳定性。
3 实验验证
为验证减小系统频率抖振技术理论的正确性和利用优化滑模面切换函数、三阶正交锁相环设计等技术的有效性,通过MATLAB仿真和实物平台联合调试等技术手段验证电动机反电动势相位跟踪误差、频率辨识精度、系统频率抖振幅值大小的控制效果。采用GLDE-F80电动机设计了一套变频空调控制系统,其主要参数见表1。

表1 变频空调控制系统参数
传统的二阶滑模算法虽然可以辨识转速及电动机转子位置,但是其观测的转速波动较大(±10 r/min),观测反电动势需要进行滤波,会带来相位延迟(相位误差为4°)。从上面的仿真结果可以看出,传统滑模观测器的观测转速波动较大,由于低通滤波器的原因,观测的转子位置存在较大相位误差,并且误差值随转速变化而变化,结果如图7~9所示。

图7 基于传统的二阶滑模算法的实测与估算转速

图8 基于传统的二阶滑模算法的实测与估算角度

图9 传统的二阶滑模算法的观测反电动势Eα
全阶滑模观测器的仿真结果如图10~12所示,可以较好地提高观测转速性能。

图10 基于全阶滑模观测器算法的实测与估算转速
由上述实验波形可见,采用变增益滑模切换函数三阶锁相环通带频率的电动机反电动势相位偏差减小至0,抖振频率偏差精度控制在±0.2 Hz以内,实现了恒温17.6 ℃、调湿5.4 g/kg的控制效果。

图11 基于全阶滑模观测器算法的实测与估算角度

图12 基于全阶滑模观测器算法的观测反电动势Eα
4 结语
针对改进全阶滑模观测器进行了研究,减小了变频空调频率抖振,实现了电动机反电动势相位准确实时追踪,并设计了变增益滑模切换函数,降低了系统频率抖振幅值,利用三阶锁相环设计通带频率,降低了高频部分的干扰,提高了电动机频率辨识精度。保证了空调系统高效、恒温及除湿性能,从而大幅提升变频空调的能源利用效率。
