超低轨道卫星应用离子电推进技术方案
2021-06-23杨福全王成飞胡竟张宏吴辰宸张兴民耿海傅丹膺
杨福全,王成飞,胡竟,张宏,吴辰宸,张兴民,耿海,傅丹膺
1. 兰州空间技术物理研究所 真空技术与物理国家重点实验室,兰州 730000
2. 航天东方红卫星有限公司,北京 100094
由于在300 km以下的地球外部区域大气密度引起的阻尼比较明显[1],因此飞行在该区域的卫星数量受到很大限制。但是对于重力梯度测量卫星和对地观测卫星的轨道如果设计在该区域,将使得任务优点十分突出。然而残余大气对卫星造成的阻尼会严重影响飞行状态和轨道精度[2],解决该问题的有效方法就是采用小推力推进系统对阻尼进行补偿[3-4]。不同任务卫星需要的阻尼补偿方式不同,对于无拖曳飞行任务,需要实时抵消对应的大气阻尼。而非无拖曳飞行只需保证任务要求的卫星轨道精度,补偿方式有两种:一是连续推力调节输出补偿,二是间歇式恒定推力输出补偿。前一种方式由于实时根据大气阻尼变化调节输出推力,卫星受到的飞行方向的残余力很小,因此可实现精细的轨道维持;后一种方式工作在一个较大的恒定推力模式,每次开机时轨道抬升,关机时轨道衰减,因此轨道高度呈现波浪式变化,精度相对较低[4]。在实际任务中,补偿方式的选取由任务对轨道精度的要求决定。重力梯度测量卫星等无阻尼惯性飞行任务,对推进系统的特殊要求包括推力宽范围连续调节(1~20 mN)、推力调节的快速响应(≥2.5 mN/s)、低推力噪声(在2 mHz频率下≤5 mN,在0.2 Hz频率下≤0.05 mN)、高推力分辨率(≤12 μN)。对地观测卫星的高精度轨道维持任务,推进系统的要求主要为推力宽范围调节(1~25 mN)、相对高的推力分辨率(≤100 μN)等[4-5]。此外,对于上述任务,考虑卫星有足够长的寿命以完成相应的任务,这就要求推进系统具有较长的寿命(≥10 000 h)和较高的额定比冲(≥2 000 s)。由于离子电推进具有宽范围连续精细调节性能、低噪声、长寿命和高比冲等特点,使其成为超低轨卫星大气阻尼补偿任务推进系统的优先选择。国外已经在超低轨卫星上成功应用的离子电推进包括欧空局GOCE卫星的无拖曳飞行阻尼补偿T5离子电推进[6]和日本SLATS计划“燕”卫星阻尼补偿12 cm离子电推进[7-8]。GOCE卫星离子电推进阻尼补偿工作轨道范围220~268 km,推力范围1~20 mN,比冲500~3 500 s,推力分辨率≤12 μN[9-10]。“燕”卫星离子电推进轨道维持范围220~268 km,推力调节范围10~28 mN,比冲2 000~2 500 s。
本文分析了220~268 km高度范围大气阻尼变化情况和该高度范围不同任务类型卫星对电推进技术需求。提出了离子电推进推力调节方案,研究了指标体系、系统组成、推力控制方案和在轨应用策略,并进行了初步的技术验证。
1 需求分析
1.1 大气阻尼变化分析
大气阻尼是超低轨卫星的重要约束条件之一[4]。卫星飞行时刻、轨道高度和迎风截面积决定了其所受的大气阻力。对于确定的卫星,在某一飞行时刻其受到的阻尼变化与大气密度成正比,而大气密度的变化范围与轨道高度、太阳辐射强度、地磁活动指数、季节、昼夜等因素有关。在自由分子流状态下,大气阻力引起的卫星质心加速度为:
式中:Cd为大气对卫星的阻力系数;vs为航天器的轨道速率;M为航天器质量;Av为航天器投影到垂直于飞行方向平面上的横截面(即迎风面)的面积;ρa为气体的质量密度。
因此,卫星受到的飞行方向大气阻力计算公式[2]一般形式为:
根据相关模型,对不同高度轨道上的大气平均密度能够得到粗略的估计,但是实时大气密度受各种因素的影响有较大的波动范围,很难精确预测[11-12]。根据NRLMSISE-00大气模型计算得到太阳活动和地磁活动平年单位迎风面积上受到的大气阻尼随高度变化曲线见图1。从图1可以看出,当轨道高度从300 km下降到180 km时,单位迎风面积上受到的大气阻尼从1 mN上升到28 mN,变化达到30倍。在250 km轨道单位迎风面积上受到的平均大气阻尼约为4 mN。
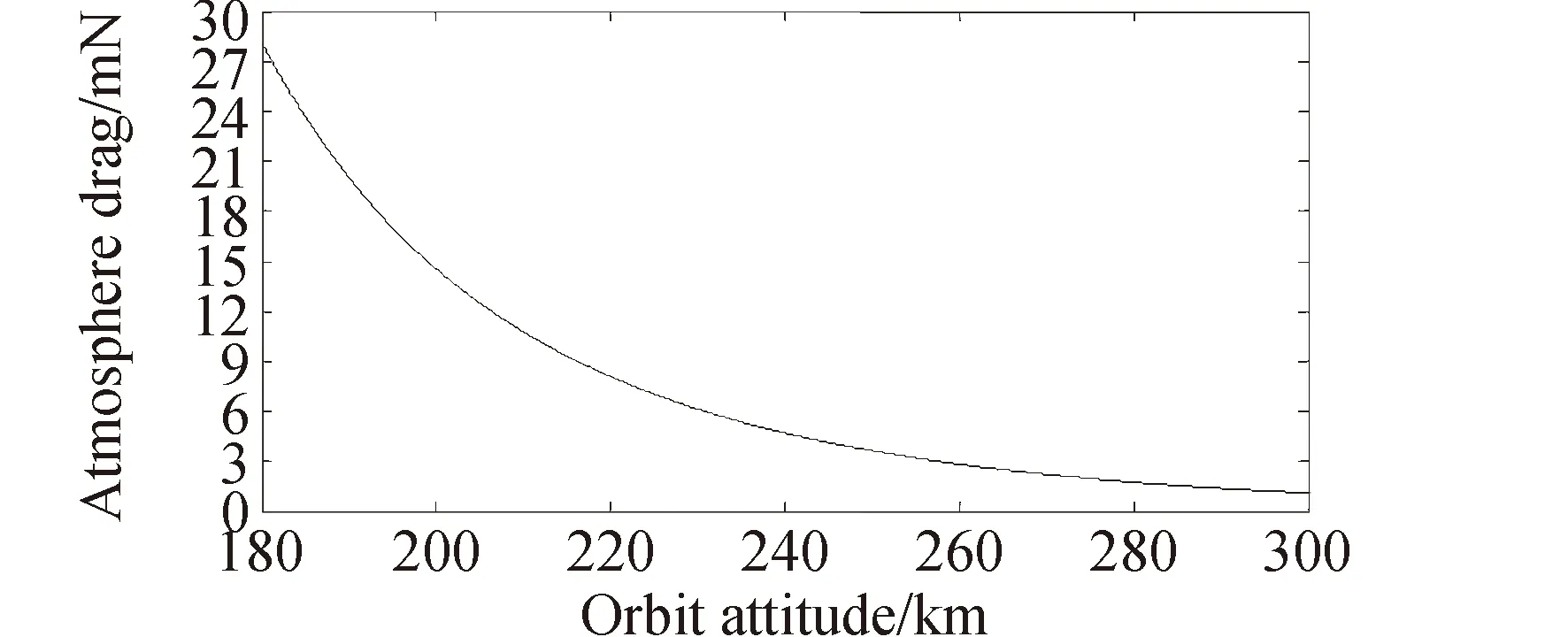
图1 大气阻尼与轨道高度的关系曲线
同时,根据NRLMSISE-00大气模型对250 km轨道高度上太阳活动和地磁活动平年大气阻尼随季节变化的情况进行计算,计算结果见图2。从图2可以看出,在250 km轨道上,单位迎风面积受到的大气阻尼1年内随季节变化范围约为3.5~4.7 mN。
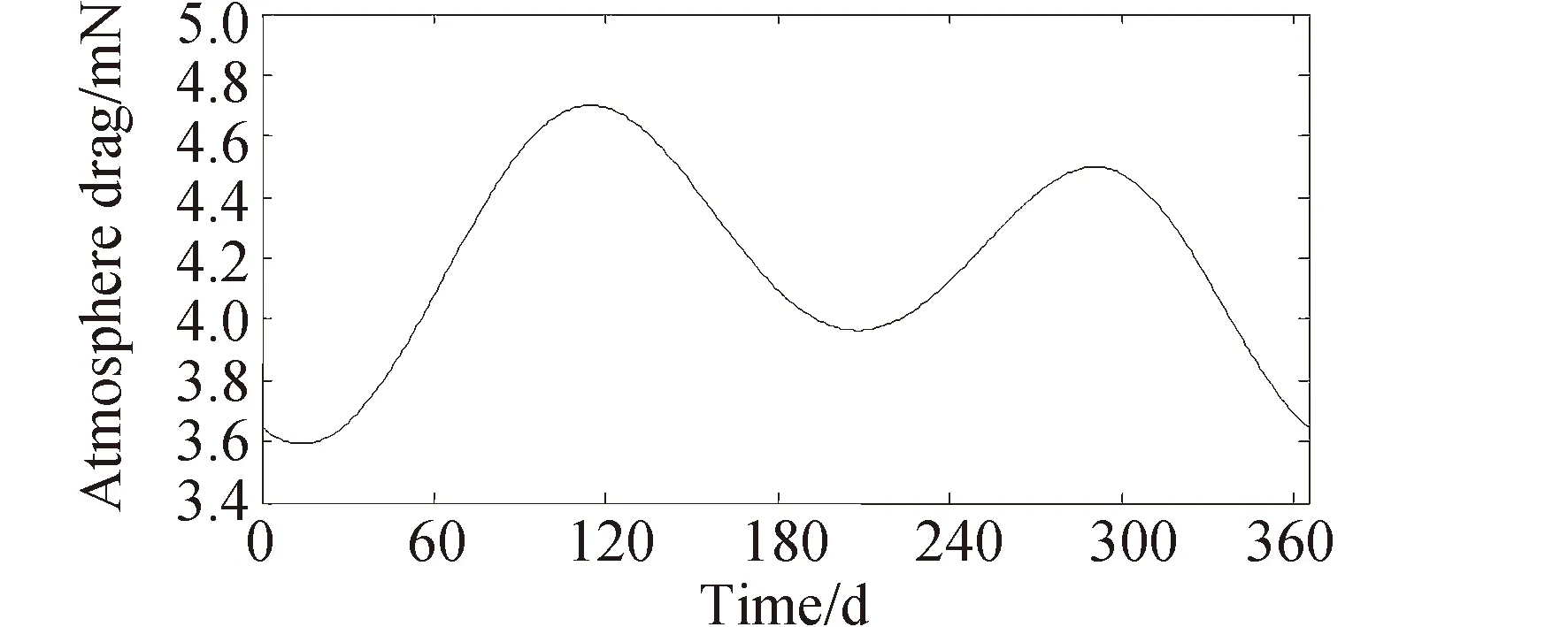
图2 250 km轨道高度大气阻尼与时间的关系曲线
上述曲线基本反映了太阳和地磁活动平年大气阻尼的变化情况,但是在太阳活动和地磁活动高年,大气阻尼会高出数倍,例如GOCE卫星在250 km轨道上飞行时于2013年下半年遇到地磁风暴,其中6月1日卫星受到的阻尼变化为4~21 mN[6,9]。
从上述分析计算可知,卫星在超低轨道飞行时,其受到的大气阻尼随高度变化、太阳和地磁活动影响变化范围很大。
1.2 不同任务类型分析
1.2.1 无拖曳飞行任务
无拖曳飞行最典型的事例为重力梯度测量卫星和引力波测量卫星,其中重力梯度测量卫星如GOCE卫星飞行在200~300 km的超低轨道。这里将以重力梯度测量卫星为对象进行超低轨无拖曳飞行任务需求分析。若重力梯度测量卫星轨道高度为250 km,为了恢复200阶的重力场,空间分辨率达到100 km,并使相应的大地水准面分辨率达到1 cm。对重力梯度仪提出的要求为测量范围3 000 E、测量精度4 mE/Hz1/2、测量频带0.005~0.1 Hz。
对于重力梯度测量卫星的科学测量轨道高度若取250 km,卫星质量1 050 kg,迎风面面积1.1 m2,估算得到在最大和最小大气密度下卫星大气阻尼分别为约18 mN和2 mN,由此引起的加速度分别为1.7×10-5m/s2和1.7×10-6m/s2。如果卫星不通过无拖曳控制来抵消大气阻尼引起的加速度,那么加速度计的动态范围就需要达到152 dB,这会给加速度计的设计带来极大的难度。因此重力梯度测量卫星必须通过推进系统进行阻尼补偿[13]。考虑了无拖曳控制的作用后,加速度计的共模输出范围应大于1.7×10-6m/s2,也即要求卫星无拖曳控制后残余加速度小于1.7×10-6m/s2。
重力梯度仪的测量频率范围为0.005~0.1 Hz。考虑到滤波存在过渡带,采样率最低应为测量通带上限的2.56倍。参考GOCE卫星重力梯度仪,梯度测量科学数据输出速率1 Hz可满足需求。
加速度计的共模输出是无拖曳控制系统的被控量,需要更高的输出速率以提高系统的控制响应速度,因此无拖曳控制测量数据的输出速率定为10 Hz。
为了获取足够详细的重力场数据,重力梯度测量卫星在轨工作时间不应小于3年,对应阻尼补偿推进系统的总冲不应小于106N·s。
由上面分析可知,考虑太阳高低年大气阻尼变化、扰动、控制精度等因素并取一定的裕度后,重力梯度测量卫星阻尼补偿推进系统的推力范围为1~20 mN、推力分辨率小于100 μN、推力输出测量频率不低于10 Hz、总冲不小于106N·s。
目前主要应用的推进系统有化学推进、冷气推进、电推进等。对于重力梯度测量卫星任务,传统的化学推进由于推力大(>1 N)、比冲低(<300 s),无法适应任务需求。冷气推进虽然推力大小和推力精度能适应任务,但是比冲太低(<100 s),完成任务所需的推进剂量非常大;霍尔电推进推力调节范围有限(调节比小于3∶1)、推力调节分辨率低(>1 mN),难以满足任务需求;离子电推进推力调节范围宽(调节比大于20∶1)、推力调节分辨率高(≤12 μN)、比冲高(≥3 000 s),完全满足重力梯度测量卫星的任务需求。
1.2.2 轨道维持任务
工作在300 km轨道高度以下的卫星在没有主动维轨的情况下,由于大气阻尼作用轨道高度衰减很快,因此要实现超低轨道任务目标,卫星必需采用推进系统进行阻尼补偿以实现轨道高度的维持。假定在220~268 km高度范围飞行的卫星迎风面积为0.8m2,考虑极端情况卫星受到的大气阻尼大约在2.0~25 mN之间。为了使卫星飞行在较精确的近圆轨道上,实现平滑的轨道维持,就需要推进系统对大气阻尼进行实时补偿。对于超低轨卫星轨道维持任务,由1.2.1分析可知,传统的化学推进和冷气推进只能满足短期任务和轨道精度要求不高的任务;霍尔电推进和离子电推进由于推力适中(1~102mN)、比冲较高(>1 500 s),成为长寿命超低轨卫星的优选。对于220~268 km高度轨道的超低轨任务,要使卫星任务总冲在5×105N·s以上,而且卫星7天自主维持轨道精度优于100 m和1天自主维持轨道精度优于10 m,推进系统的推力调节分辨率应小于100 μN[4],这时离子电推进最具有任务适应性。
2 离子电推进技术方案
2.1 系统组成
要实现重力梯度测量卫星和对地观测卫星阻尼补偿要求的功能和性能,离子电推进系统需通过各组成部分的协调配合工作才能实现。系统基本组成至少应包括电推进控制单元、电源处理单元、离子推力器和氙气比例供给子系统,对它们的要求如下[14-16]:
1)离子推力器须具备推力宽范围精细调节功能和工作的高稳定性。
2)电源处理模块须具备输出电压、电流的宽范围输出以及高稳定性、高精度和高分辨率。
3)氙气比例供给单元需具备宽范围精确调节功能。
4)控制模块需具备精确反馈控制功能。
从降低系统复杂性和控制效率角度考虑,将控制模块和电源处理模块集成在一个单机中是合理的选择。氙气比例供给单元从模块化角度可分为氙气瓶、调压模块和流量控制模块。从寿命、可靠性以及推力输出能力需求综合考虑,离子电推进系统可采用适当的冗余和备份。基本组成与工作关系如图3所示。具体配置为2台10 cm离子推力器[13-14]、2台电源控制单元(包括控制模块和电源处理模块)、1套氙气比例供给单元(包括1个氙气瓶,1台调压模块和2台流率控制模块)。为了实现更高的可靠性,2台离子推力器与2台电源处理与控制单元进行交叉备份。
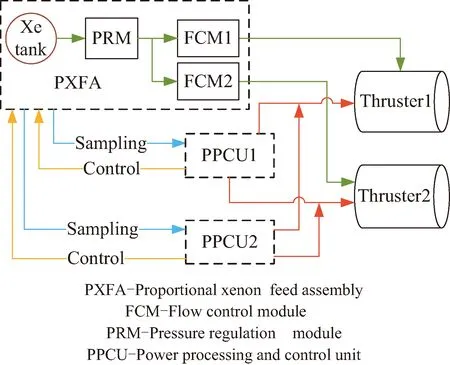
图3 离子电推进系统组成示意
系统工作过程如下:由卫星发出工作指令到电源控制单元,电源处理与控制单元通过相应的控制和变换后向离子推力器供电,同时电源处理与控制单元控制氙气比例供给单元向推力器供气。
电源处理与控制单元可根据卫星发出的阻尼补偿需求指令,通过特定的控制算法控制氙气比例供给单元的流量控制模块和电源处理与控制单元的电源处理模块随时调节氙气流率和电参数,实现推力的实时快速精确调节。
2.2 系统技术指标
如前所述,在超低轨道执行任务的卫星,其飞行状态由任务类型决定,基本分为无拖曳飞行和保持一定轨道精度的非无拖曳飞行。对于重力梯度测量卫星而言,一般在一个相对固定的轨道上运行,已经成功飞行的GOCE卫星和我国规划的重力梯度卫星设计轨道均为250 km。对于对地观测卫星,根据观测目标的不同轨道变化范围较宽,可以在220~268 km范围机动。为了满足任务对卫星飞行状态的要求,进行大气阻尼补偿的离子电推进系统技术指标就需要覆盖可能出现的所有极端情况。结合前面的超低轨大气阻尼分析和任务分析,提出了满足不同应用目标的离子电推进系统主要技术指标见表1。

表1 离子电推进系统关键参数
2.3 推力调节方案
超低轨卫星不论是无拖曳飞行还是精确近圆轨道飞行,均需要进行大气阻尼补偿。如果卫星在220~268 km高度范围进行机动或分段工作,考虑最严酷环境,需要补偿的阻尼范围应在1~25 mN之间变化。
离子电推进具有放电过程与离子加速引出过程相对分离的特点,使得其在实现宽范围推力调节时,工作稳定性和性能均能保持相对较优的水平[6,13]。通常通过阳极流率、阳极电流、磁场强度、加速电压等参数组合调节引起束流密度的变化从而实现推力的调节[15]。
一般任务的离子推力器都设计为单点或多点工作模式,磁场一般由永磁铁产生,工作点的变化只能通过阳极流率、阳极电流和加速电压的调节实现[13-15,17]。这种调节模式很难实现连续精细调节。对于超低轨任务需求,由于推力调节范围要求宽、推力分辨率要求高,因此需要引入磁场调节方法,磁场调节通过电磁线圈实现[14,18-19]。为了尽量降低系统复杂性和保证宽范围内相对高的比冲,推力调节拟采用阳极流率、阳极电流和励磁电流三个参数的组合调节方法实现,调节过程中加速电压始终保持恒定。原理如图4所示。
图4所代表的具体物理机理为:输送到放电室的工质气体是产生等离子体的物质源泉,通过改变工质气体流率可改变放电室的中性气体密度,进而改变放电室等离子体密度。在一定电参数下,工质流率保持在一定合理范围是维持放电室正常放电的必要条件,过大或过小将使得放电性能变差,工质流率需根据输出推力大小和比冲要求,配合阳极电流和励磁电流进行合理调节。阳极电流大小反映阴极发射的原初电子数量的多少,调节阳极电流可改变放电室气体放电等离子体密度。磁场在放电区域对电子起到约束作用,使得电子从阴极向阳极运动的过程中绕磁力线做螺旋式前进,从而增加了与中性气体的碰撞电离概率,通过改变放电室磁场强度大小,在较大范围内改变气体电离率,从而改变放电室气体放电等离子体密度。在恒定的加速电压下,放电室等离子体密度的变化决定了引出束流密度的变化,也就决定了推力的变化。
基于该调节方案开展了试验验证,获得了推力与阳极流率、阳极电流和励磁电流之间的变化关系。图5(a)~(c)给出了其中三个阳极流率下的阳极电流、励磁电流与推力的变化关系曲线。由变化关系曲线可以看出通过三个参数的组合调节能实现推力的宽范围精细调节。试验得到了单台离子推力器实现推力1~20 mN、比冲500~3 500 s指标所需调节的阳极流率、阳极电流和励磁电流范围分别0.104~0.483 mg/s、0.45~2.5 A和0.045~0.75 A。

图5 不同阳极流率下推力与阳极电流、励磁电流关系
2.4 推力控制方案
根据卫星阻尼补偿工作模式可知,卫星给出的补偿推力信号即系统控制输入量是预先未知的随时间任意变化的函数,因此从控制的角度来看,该系统是一个随动系统。该系统对卫星阻尼补偿需求应进行快速响应,在特定的控制算法支持下,控制模块将阻尼补偿需求信号转化为各调节参数要求分发给不同功能单机,并根据推力器工作参数的采样,通过精确和快速反馈控制对电源处理模块和氙气比例供给单元的输出参数进行控制,实现推力器供电、供气参数的调节,最终通过推力输出与阻尼补偿需求信号的对比实现闭环控制[16]。
由于离子电推进工作机理的复杂性,从等离子体的理论建立推力与工作参数之间的物理模型,即机理建模十分困难,即使能够建立关系,其精度也无法满足精确控制推力输出的要求[20]。本方案拟采取基于试验数据的数学建模,即辨识建模的方法获得推力与调节参数之间的精确模型,并在此基础上设计推力控制算法,给出开环和闭环控制参数。
离子电推进特性表明,通过流率与阳极电流配合可实现大步长推力调节,通过励磁电流可快速改变推力,适合输出推力的高频控制。因此,长时间的大步长推力变化依靠流率和阳极电流变化实现,而推力小增量快速变化则通过励磁电流变化实现。推力调节控制优先级应该为励磁电流、阳极电流和流率。具体方式为采用开环模式通过相对较慢的放电室流率和阳极电流调节进行推力的粗调节;采用闭环模式通过励磁电流的快速调节,提供一个高精度,快速响应的微小推力调节控制。推力控制框图如图6所示,图中飞行方向的阻尼力作为推力调节控制的输入信号,根据输入信号,在基于试验的控制编表中查找需要调节的放电室流率、阳极电流和励磁电流,这三个参量作为流量控制模块和电源处理模块参数调节的输入信号。推力的精调通过励磁电流的闭环控制调节实现,具体的实现过程为控制模块对反馈的推力输出信号与重力梯度仪测到X方向的阻尼力输入信号进行比较,二者的差值作为调节励磁电流的驱动信号。
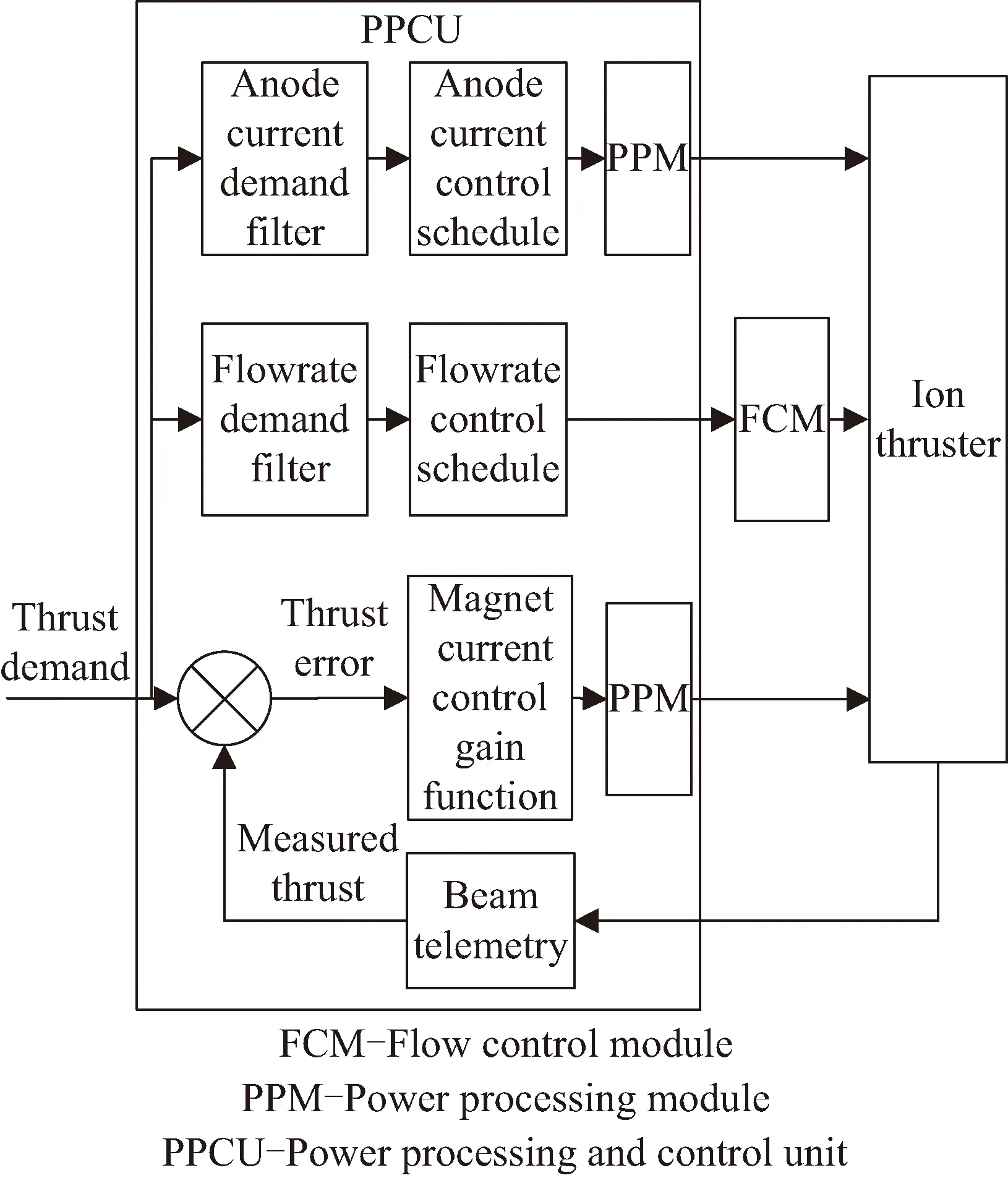
图6 离子电推进系统推力控制框图
2.5 与国外离子电推进方案对比
本方案离子电推进与欧空局GOCE卫星的无拖曳飞行阻尼补偿T5离子电推进[6]、日本SLATS计划“燕”卫星阻尼补偿12 cm离子电推进[7-8]均属于考夫曼型离子电推进,它们都具有推力调节范围宽、比冲高、推力调节分辨率高等特点。本方案与英国T5相近,口径均为10 cm,磁场均采用电磁场,推力的调节均通过阳极电流、励磁电流、流率的调节实现,不同之处为T5离子推力器栅极为凹面双栅,本方案为凸面双栅。日本的12 cm离子电推进磁场采用永磁场,栅极为凸面双栅,推力调节只通过阳极电流和流率实现,调节分辨率不高。具体对比见表2。

表2 与国外方案对比表
对比可知,本方案具有以下技术优势:
1)与英国T5离子电推进相比推力调节范围更宽,多任务适应性更强。
2)与英国T5离子电推进相比,由于采用凸面栅,使得束流引出效率更高。
3)与日本12 cm离子电推进相比,由于采用可调节的电磁场,使得推力范围、比冲、推力分辨率均具有优势。
3 离子电推进在轨应用策略
在220~268 km高度范围飞行的卫星,离子电推进主要承担飞行方向的大气阻尼补偿任务。为了减小迎风面积,卫星一般都设计成细长型或流线型,为满足卫星结构布局要求和系统工作要求,离子电推进各组成部分在卫星上应合理布局,一般2台互为备份离子推力器安装在卫星的尾部,关于卫星X轴对称布置,每一台的推力矢量过卫星质心,对应的2台电源控制单元和2台流量控制模块靠近推力器对称布局,氙气瓶安装在X轴上[10]。
对于轨道高度约250 km的重力梯度测量卫星而言,科学测量期间的阻尼补偿由一台推力器执行。如果需要轨道提升,可考虑2台推力器同时工作。对于对地观测卫星轨道维持任务,在任务轨道高度下限工作时,如果遇上大气密度高的条件,单台推力调节指标1~20 mN的推力器或不满足轨道维持要求,因此需要2台推力器同时工作。此外,需要轨道大幅提升时,也可2台推力器同时工作。
对于无拖曳飞行任务,离子电推进依据重力梯度仪测得的飞行方向的阻尼需进行实时连续阻尼补偿[21]。对地观测卫星轨道维持任务,如果轨道维持精度要求高,离子电推进可依据测轨数据进行连续工作,轨道维持精度要求不高的场合,可根据任务需求间歇式工作[4]。
4 结束语
针对超低轨道卫星阻尼补偿应用需求,通过一定轨道高度大气阻尼分析和任务目标分析,提出了满足任务需求的离子电推进方案,得到以下结论:
1)放电室流率、阳极电流和励磁电流组合调节的方案可实现单台10 cm离子推力器1~20 mN推力调节,推力分辨率12 μN,对应比冲500~3 500 s。
2)采用开环控制通过放电室流率和阳极电流调节可实现大步长推力调节,采用闭环控制通过励磁电流的快速调节,可实现高精度、快速响应的小增量推力调节。推力调节控制优先级为励磁电流、阳极电流和流率。
3)研究表明,离子电推进具有的宽范围连续精细调节和高比冲性能与超低轨卫星无拖曳飞行和轨道维持任务要求相匹配。离子电推进系统设计方案满足无拖曳飞行和对地观测卫星轨道维持任务推力调节范围1~25 mN,推力分辨率优于100 μN的需求。
