汽车自动紧急制动系统行人避障策略及仿真
2021-06-22向世林
向世林
(中国汽车工程研究院股份有限公司,重庆 401122)
0 引言
汽车自动紧急制动系统(AEB)可以通过摄像头、毫米波雷达等传感器设备对周围环境状况进行判断,在发生碰撞危险之前,实时、不断发出预警信号,当驾驶员未采取有效措施时,AEB会主动控制车辆并进行紧急制动,从而避免或减轻对行人的伤害。据统计,AEB系统的应用可减少约27%的车辆碰撞交通事故,能够有效保障行人的安全[1]。
近年来,对于自动紧急制动行人避障系统(AEB-P)的研究日益得到重视,国内外现有的行人避障系统研究主要包括控制策略、行人检测和危险场景三大方向。文献[2]基于我国特有的交通场景条件,建立了AEB-P典型测试场景,并借助PreScan工具进行了系统分析。文献[3]提出了基于车车通讯AEB-P的仿真模型,并进行了相关的测试验证。文献[4]基于模糊控制相关理论,提出了一种行人避撞自动转向方法,在30km/h车速范围内精度较高。文献[5]提出了一种行人预测位置和车辆速度相融合的目标检测算法,可以保证在40km/h车速内的有效避撞。文献[6]针对行人横穿马路的典型场景,对车辆速度进行实时控制,可以有效防止车辆与行人发生碰撞。文献[7]根据行人速度提出了一种碰撞风险计算方法,可以对碰撞概率进行量化分析,并且计算结果与实际安全测评数据有较高的契合度。
综上所述,目前我国AEB-P系统的研究大多是针对行人检测和危险场景,在行人避障策略方面缺乏深入分析。由于国内外交通状况不同,不能直接将国外相关研究应用于我国交通场景。为此,本文在C-NCAP发布的AEB-P行人避撞评价标准基础上,建立了上层模糊控制和下层PID控制的联合分层控制策略。对安全距离算法[8](AS)、碰撞时间算法[9](TTC)以及车头时距算法[10](THW)进行了对比分析,提出了基于TTC算法的风险评价模型。最后通过搭建Simulink/Carsim联合仿真模型,对控制策略的有效性进行验证。
1 风险评价模型和预警系统
1.1 建立风险评价模型
风险评价模型决定AEB-P系统的响应时间,这是AEB-P系统安全性的重要保障。本文建立了如式(1)所示的TTC风险评价模型。
(1)
式中:tTTC表示从某一时刻开始,车辆避免与前车发生碰撞的时间;Δv表示车辆与目标物纵向相对速度;Δa表示车辆与目标物纵向相对加速度。
将AEB-P预警系统发出预警信号时的tTTC临界值作为tTTC安全阈值。该参数的选取可以基于中国C-NCPA发布的AEB-P行人避撞测试标准,通过实际道路测试和虚拟仿真手段确定。tTTC安全阈值随不同的车速进行变化,与表1中的tTTC取值相对应。
1.2 AEB-P预警系统
如表1所示,AEP-P预警系统根据不同车速的tTTC取值划分出相应的安全等级。该安全等级分为3级,其中Ⅰ级表示行驶安全级,说明此时行车处于安全状态,AEB-P预警系统输出信号值0;Ⅱ级表示碰撞预警级,此时与行人有碰撞风险,AEB-P系统输出信号值1;Ⅲ级表示碰撞危险级,车辆与行人即将发生碰撞,AEB-P系统输出信号值2,此时驾驶员若还没有进行减速控制,AEB-P系统立即介入进行制动。
当车辆处于Ⅰ级安全状态,AEB-P系统不干预驾驶员行为。当车辆处于Ⅱ级状态,AEB-P系统实时不断发出预警信号。驾驶员的反应时间选取为1.25s。制动迟滞一般在0.2~0.3s之间,因此设置预警时间为1.5s。
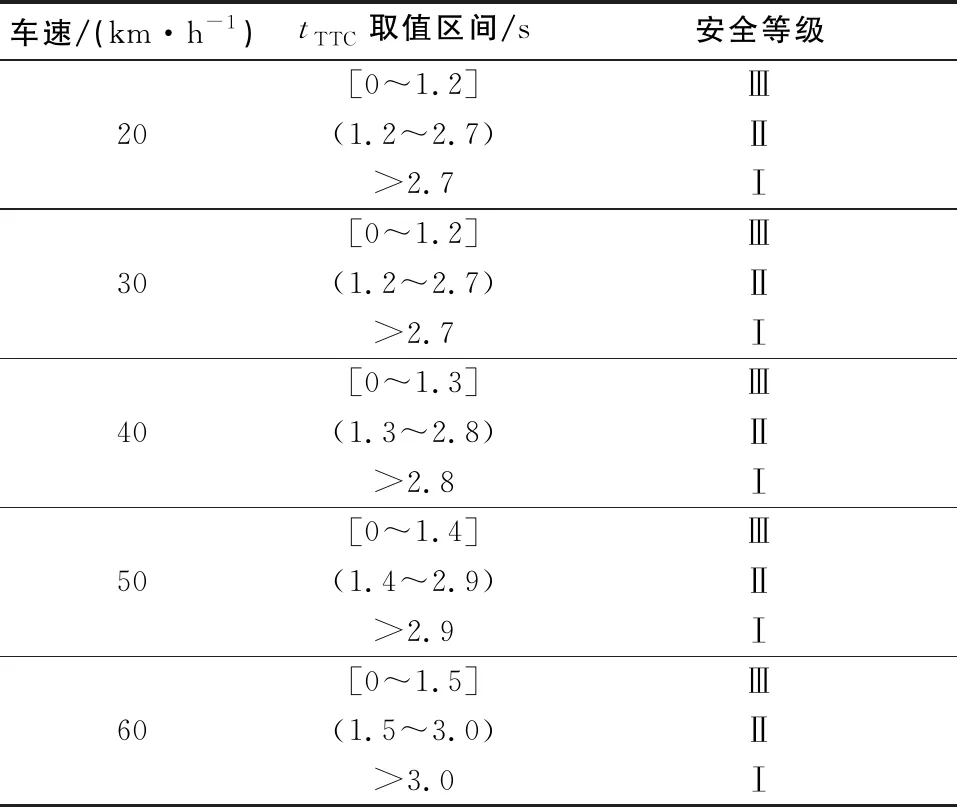
表1 不同车速时tTTC取值区间和安全等级
2 AEB-P系统控制策略
2.1 AEB-P系统工作原理
如图1所示,基于风险评价模型上层模糊控制器可以输出期望的减速度,下层PID控制器则将获取的期望减速度值以制度管路压力值的方式传递给车辆的制动系统,实现对车辆速度的控制。
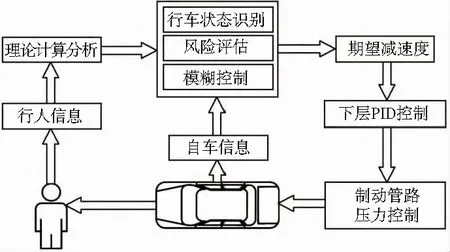
图1 AEB-P系统工作原理
2.2 AEB-P上层模糊控制系统
本文建立的模糊控制器输入参数为车辆与行人纵向相对速度Δv0(Δv0=0-v2,km/h)以及车辆与行人相对距离Δs(m)。模糊输入参数、输出参数的语言变量可以划分为N10(负大)-N1(负小)、Z0(零)、P1(正小)-P7(正大)。Δs的论域范围为[0,80],采用Z0、P1、P2、P3、P4、P5、P6、P7这8个变量描述(图2)。Δv0的论域范围为[-150,0],采用Z0、N1、N2、N3、N4、N5、N6、N7、N8、N9、N10这11个语言变量进行描述(图3)。输出量期望减速度ar(m/s2)的论域为[-10,0],采用Z0、N1、N2、N3、N4、N5、N6、N7这8个变量描述(图4)。
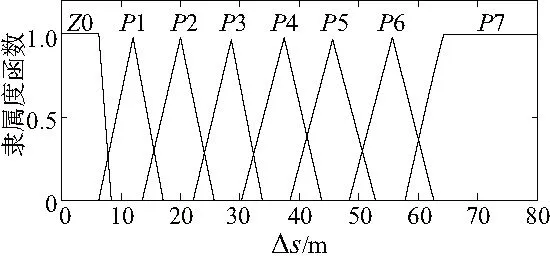
图2 距离隶属度函数
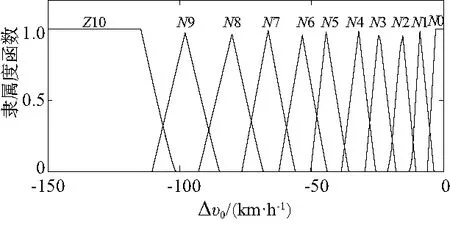
图3 速度差隶属度函数

图4 车辆期望减速度隶属度函数
在确保安全的前提下,以中国C-NCPA发布的AEB-P行人避撞测试工况为标准来制动模糊规则,同时考虑驾乘人员的舒适性,部分模糊规则如表2所示。

表2 部分模糊规则
2.3 AEB-P下层PID制动控制系统
下层PID控制系统将期望减速度以制动管路压力信号的形式传递到车辆制动系统,实现对车辆的速度控制。期望减速度以及期望减速度与实际减速度两者之间的差值作为PID控制器输入参数,制动管路压力值作为PID控制器输出参数,以期望减速度和实际减速度的差值作为误差控制参数,得出PID控制器的比例参数kp=5,积分参数ki=15,微分参数kd=0。
3 AEB-P系统仿真分析
3.1 C-NCAP行人测试工况
C-NCAP行人测试场景如图5、图6所示。C-NCAP测试规程对于AEB行人系统规定了4个测试场景:远端碰撞CVFA-25、CVFA-50和近端碰撞CVNA-25、CVNA-75。CVFA场景的行人速度为6.5km/h,CVNA测试场景的行人速度为5.0km/h。
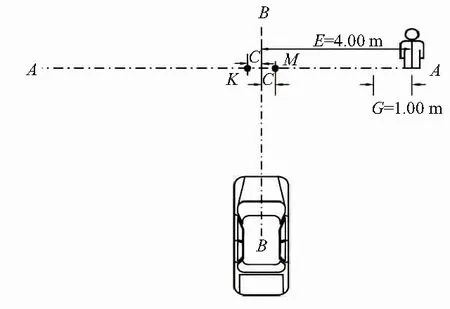
图5 CVNA-25和CVNA-75行人测试场景
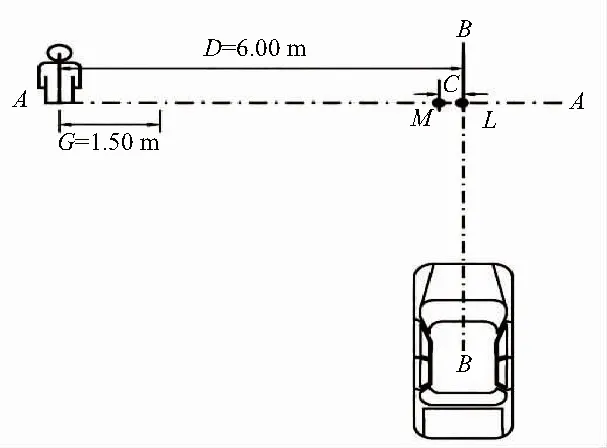
图6 CVFA-25和CVFA-75行人测试场景
在图5中,BB表示测试车辆的中心线,轴线AA表示假人的运动轨迹,C表示25%和75%偏置碰撞,M表示近端25%碰撞点,K表示近端75%碰撞点,G表示假人的加速位移。在图6中,C表示25%远端偏置碰撞,M表示远端25%碰撞点,L表示远端50%碰撞点。
测试工况设置5组,每组测试场景分为:CVFA-50、CVFA-25、CVNA-25、CVNA-75。车速范围为20 km/h~60 km/h。
3.2 仿真结果及分析
建立的Simulink/Carsim联合仿真模型如图7所示,其中,理论计算模块用于获取车辆以及行人的速度、位置等参数,然后据此计算出相应的tTTC值。逆动力学模型可以将期望的减速度转变为制动压力信号值,实现对车辆的速度控制。
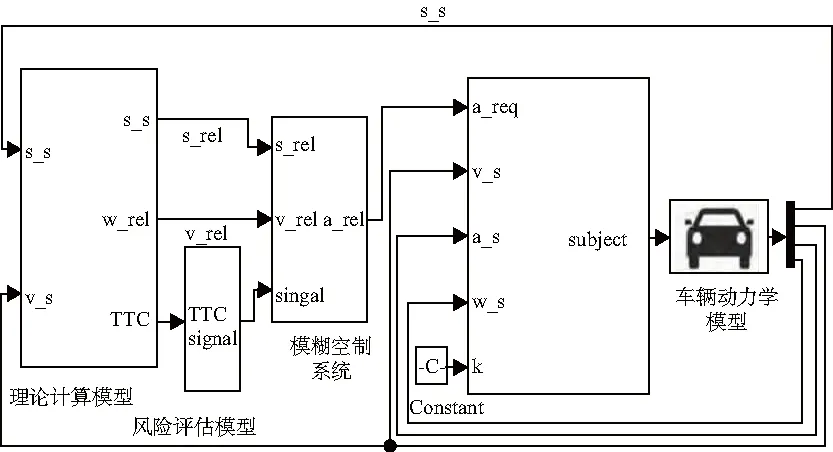
图7 车辆仿真模型
AEB-P的部分典型场景仿真测试结果如图8和图9所示。L1表示车辆左边前轮的制动轮缸曲线,L2表示车辆左边后轮的制动轮缸曲线。由于车辆两侧的制动力相同,故仅对车辆左边的制动情况进行分析。
由图8和图9的仿真结果可以看出,车辆制动后的相对车速变化平稳,车辆与行人始终没有发生碰撞现象(Δs≠0)。预警信号发出及时准确,制动过程保持稳定,车辆的舒适性较好。
由图8(d)的减速度曲线可知,实际减速度a2能够很好地跟随期望减速度a1进行变化。车辆在安全行驶状态下,a=0表明AEB-P没有影响车辆的行驶状况。当车辆开始制动后,减速度较为平稳,曲线的振荡幅值小。由图8(e)的轮缸压力曲线可知,AEB-P系统输出的期望减速度为-6m/s2,此时后轮首先激活ABS功能,轮缸压力L2开始出现振荡起伏,然后当前轮轮缸压力L1处于-10MPa时,ABS功能也被激活。前后轮均通过ABS进行制动,可以将滑移率控制在适当的范围,很好地利用了地面摩擦力,有助于车辆输出较大的减速度。
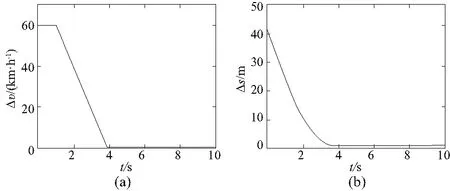
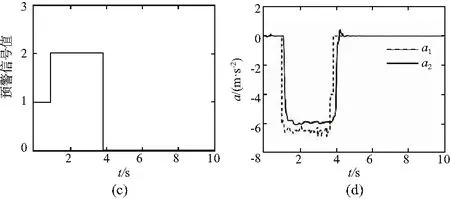
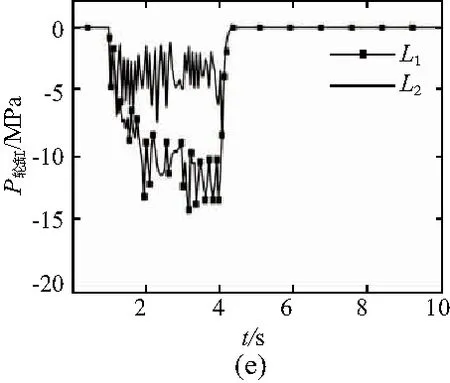
图8 CVNA-75测试场景仿真(车辆速度为60 km/h)
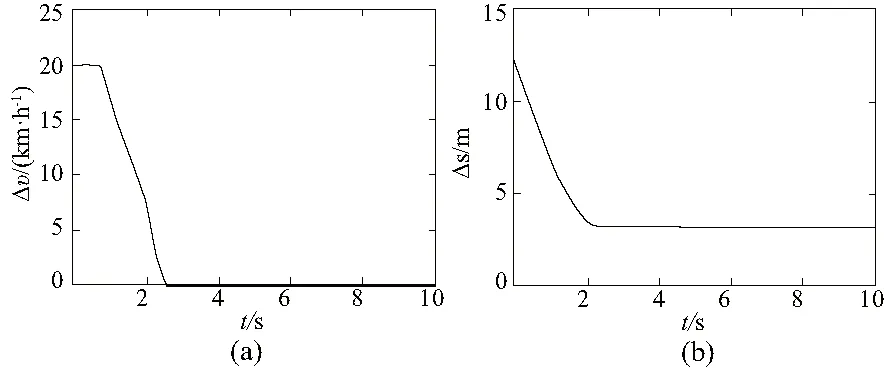
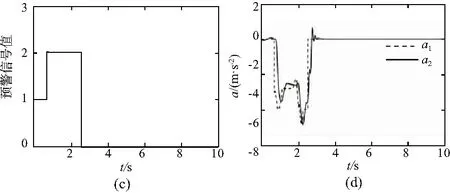
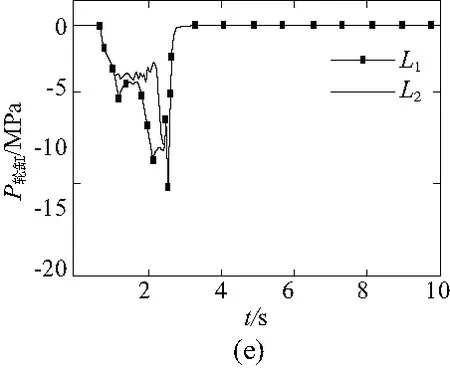
图9 CVFA-25测试场景仿真(车辆速度为25km/h)
由图9(d)所示的减速度曲线可以看出,通过模糊规则的作用,实际减速度a2能够与期望减速度a1保持一致。本文设计的AEB-P系统在制动力较小时,自动进行车辆减速度的调控,提高车辆的行驶安全性。由图9(e)中的轮缸压力曲线可知,后轮先激活ABS功能,其轮缸压力L2频繁起伏变化并保持在4MPa左右。前轮轮缸压力L1制动过程中没有激活ABS模块。
基于C-NCAP行人测试规程进行仿真。根据仿真结果可知,车辆发生紧急制动后,始终与行人保持在0.9~3.1m之间的安全距离,可以有效消除行人因车辆紧急制动带来的紧张情绪。车辆减速度范围为4.8~6.1m/s2,制动强度范围为0.48~0.61,有助于车辆根据行驶情况及时调整减速度。预警时间设置在1s左右,整个过程中没有发出误、漏警的情况。
4 结语
本文基于自动紧急制动行人避障系统(AEB-P)特性分析与辨识,将模糊控制方法和PID控制方法进行融合,提出了一种能够兼顾安全和实时的行人避障策略。针对AEB-P的响应判断需求,建立了基于TTC风险评价模型,可以有效提高AEB-P系统的安全性。通过设计相关仿真测试,验证了所提出方法的有效性,得出如下结论。
1) 基于TTC建立的风险评价模型可以及时有效地发出预警和制动信号,具有较高的准确性,能够提高车辆的行驶安全性。
2) 上层模糊控制和下层PID控制的联合分层控制策略,能够达到C-NCAP行人测试要求。在CVNA-25,车速为60km/h的极端危险工况下,仍然能够与行人保持至少0.9m的安全距离。
3) 与传统的单一恒定减速度控制方法相比,本文提出的控制策略使车辆制动过程中输出的减速度始终平稳且振荡较小,车辆具有较好的安全性和舒适性。
