蒸发器传热管中心点的视觉定位
2021-06-22邱鹏程包建国
邱鹏程,包建国,朱 墨 ,周 静,李 波
(1.中国地质大学(武汉),湖北 武汉 430074;2.中核武汉核电运行技术股份有限公司,湖北 武汉 430223)
0 引言
核电站运行过程中,蒸汽发生器传热管外表面和支撑板表面会逐渐附着沉积物,需要定期清理[1-2]。在蒸发器内部,传热管数量众多且分布密集,人体可活动空间狭小,加上蒸发器内部的核辐射,导致无法执行人工清洗任务,需要通过清洗机器人定位到传热管中心进而执行清洗任务,其中精确定位传热管中心是清洗流程中的重难点问题。
随着工业智能化的迅速发展,具有便捷性、精确性、迅速性和智能化等优点的机器视觉技术被广泛应用于工业生产的各个领域[3-6]。机器视觉定位系统可快速准确分割待测物体并实现定位,其常用视觉分割定位方法有阈值分割法、边缘分割法和区域生长法等,但此类方法容易受到环境和噪声的影响,泛化能力不强[7-8]。
针对传热管中心定位困难的问题,本文提出一种Canny边缘检测和边缘像素逼近聚类结合的视觉定位方法,来精确定位传热管中心位置。在多种外部干扰环境下验证本方法的效率、定位精度和泛化能力。
1 方法流程及原理
1.1 传热管中心视觉定位总体方案
传热管中心视觉定位总体方案流程如图1所示。总体方案主要由3部分组成:第一,图像预处理及Canny[9]边缘检测获取图像边缘信息;第二,从图像边缘信息中准确获取传热管左右边缘点集;第三,边缘点集的直线拟合,计算传热管直径的像素距离和传热管中心的像素位置。
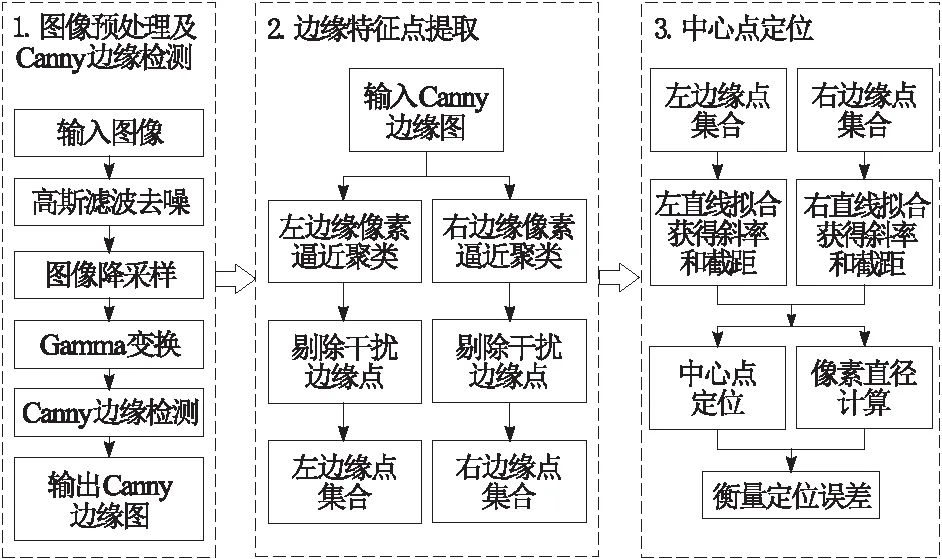
图1 传热管中心视觉定位总体方案流程
1.2 图像预处理及Canny边缘检测
因图像边缘对噪声比较敏感,故在边缘检测前对图像进行低通滤波处理[10],本文采用δ=0.8的高斯滤波算子;采用双线性插值将图像降采样至1 000×1 000的像素大小,降采样后可提升检测效率;因图像整体偏暗,故采用Gamma变换增强图像的对比度[11],使图像背景与前景边界区分更加明显;为减少图像噪声的干扰,采用鲁棒性好的Canny边缘提取算法得到边缘图。
1.3 提取边缘特征点
由于传热管在环境光源下反光明显且附着有铁锈,导致边缘信息图中传热管左右边缘之间存在许多干扰。为规避此类干扰,本文提出一种边缘像素逼近聚类的方法,可剔除干扰准确提取传热管边缘特征点。边缘像素逼近聚类法的原理如图2所示。该算法主要包含以下3个步骤:

图2 边缘像素逼近聚类法原理
a.按行从左往右(左边缘直线)或从右往左(右边缘直线)遍历全部像素,遍历到每行第1个灰度值为255的像素,则记录该像素的位置,默认遍历得到的第1个灰度值为255的像素为第1个类别。
b.若遍历得到的第N个像素在N-1个像素的邻域内,则两像素隶属于同一类别,否则新建1个类别,将第N个像素作为新类别的第1个元素。
c.遍历完毕后选取元素个数最多的类别为有效边缘点集。
1.4 直线拟合及中心点定位
采用最小二乘法拟合传热管左右边缘直线,使得每个边缘点到拟合直线的距离平方和最小。设拟合直线方程为y=kx+b,令损失函数为
(1)
损失E最小时,k和b为最佳拟合直线的斜率和截距。求损失函数E对k和b的偏导数:
(2)
(3)

(4)
(5)
解得最佳拟合直线的斜率k和截距b:
(6)
(7)
获得左右边缘拟合直线后,取2条拟合直线的中点,2个中点的连线中点即为传热管中心点。计算每个边缘点到另一侧拟合直线的距离,取所有距离的均值为传热管直径的像素距离。
2 实验验证分析
定位实验的目的是验证本文视觉定位方法的精度、效率和泛化能力。在图像识别过程中,可变干扰主要包括3种情况:光照强度的影响;传热管位置、倾斜度的影响;传热管附着沉积物的影响。在3种环境条件下,将本文方法与边缘霍夫直线定位方法、传热管阈值分割定位方法进行实验效果对比。
2.1 实验平台
本文使用Python 3.7编程语言、计算机视觉库OpenCV 4.4.0,结合Intel Core i7-9750H CPU,在Windows 10操作系统下进行实验。实验硬件平台如图3所示,传热管放置于背景全黑的环境下,照明系统采用环形光源,传热管图像采用分辨率为2 592×1 944的海康工业相机采集。
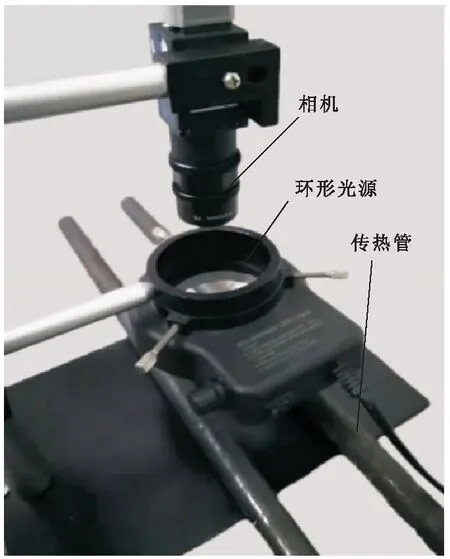
图3 传热管中心视觉定位硬件平台
为评估本方法的定位精度,需人工标定图像中传热管的实际中心像素位置和传热管直径的实际像素距离,标定结果与检测结果进行比较得到定位精度,若检测结果与传热管的实际中心像素位置相差超过5个像素距离则为误检。如图4所示,使用Labelme工具标定传热管的实际轮廓,进而得到传热管的实际中心像素位置和传热管直径的实际像素距离。
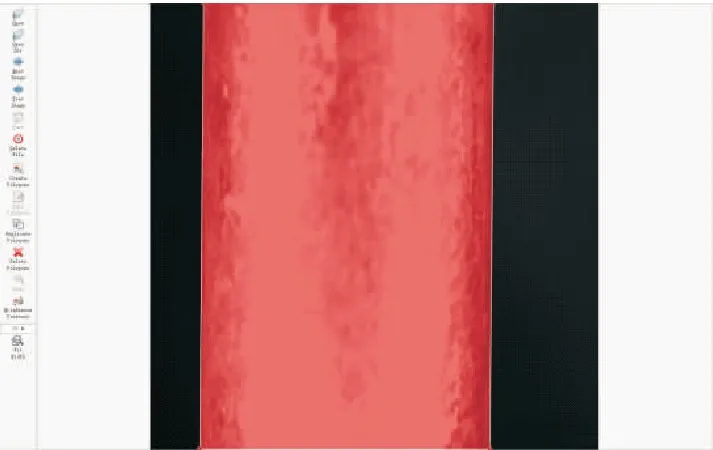
图4 传热管图像标定
2.2 不同光强的定位测试实验
针对环境光照强度变化产生的影响,进行了传热管在不同光强下的定位测试实验,测试结果如图5所示。测试结果表明,在一定光照强度范围内,只要传热管与背景的边界不消失,本方法均能准确检测边缘直线和定位中心点。
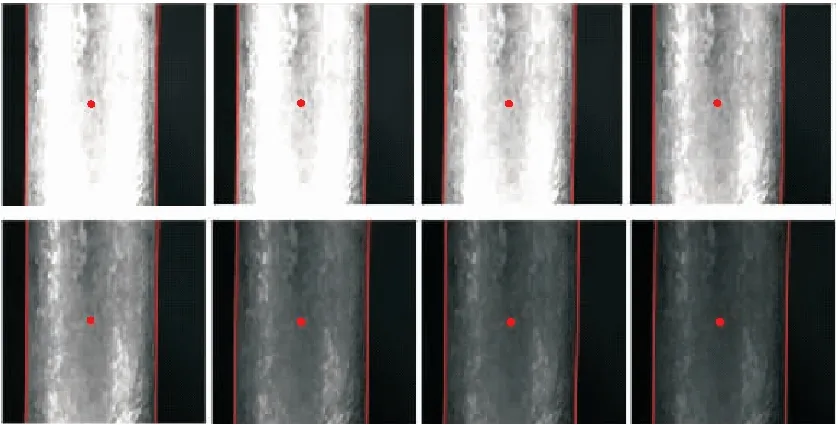
图5 不同光强下的测试结果
采集不同光照强度下的传热管图像39张,标定所有图像中传热管的实际中心像素位置和传热管直径的实际像素距离,进行不同光强下的传热管定位类比实验。不同光照强度下的传热管定位实验数据如表1所示。
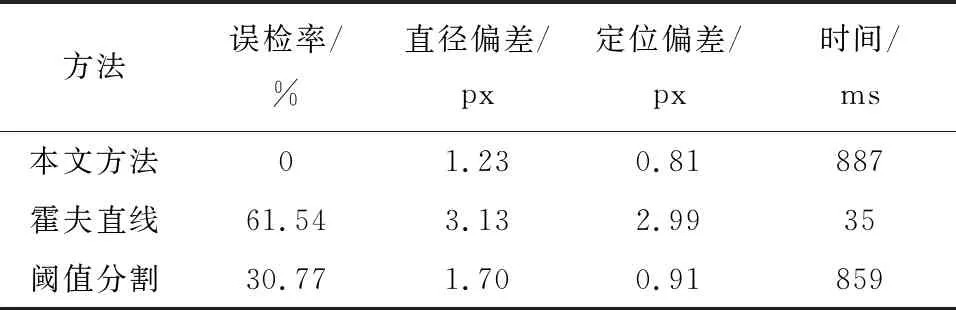
表1 不同光强下传热管定位数据
2.3 传热管不同位置、倾斜度的定位测试实验
针对实际检测中由于导轨安装误差和导轨变形导致传热管图像中传热管出现倾角的问题,进行传热管在不同位置、倾斜度下的定位测试实验,测试结果如图6所示。测试结果表明,在不同位置和倾斜度下,本方法能够准确检测边缘直线和定位中心点。
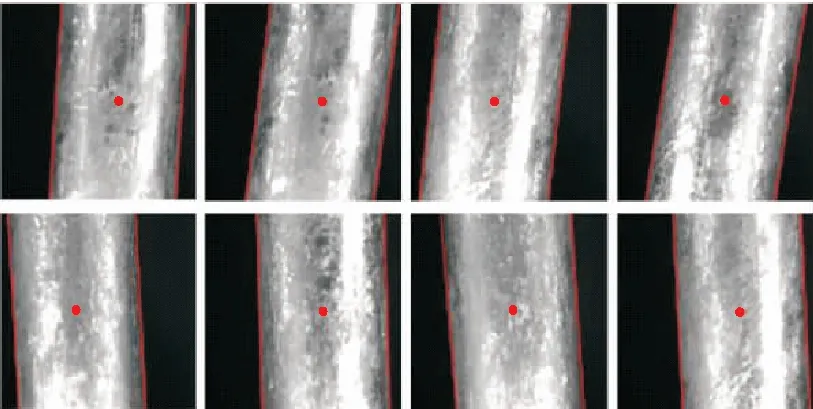
图6 传热管不同位置、倾斜度下的测试结果
在同一光照强度下,采集不同位置和倾斜角度下的传热管图像32张,标定所有图像中传热管的实际中心像素位置和传热管直径的实际像素距离,进行不同位置、倾斜度下的传热管定位类比实验。不同位置、倾斜度下的传热管定位实验数据如表2所示。
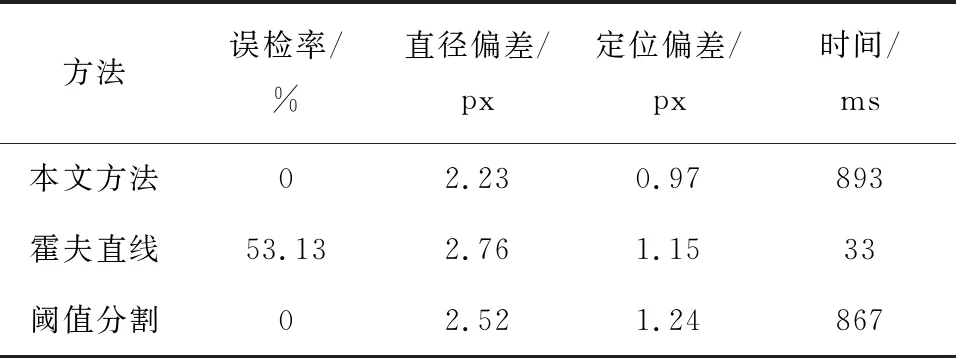
表2 传热管不同位置、倾斜度下的定位数据
2.4 传热管边缘带干扰的定位测试实验
针对传热管表面因沉积物附着产生的干扰影响,进行了传热管边缘带有不同程度干扰的定位测试实验,测试结果如图7所示。结果表明,在传热管边缘有部分干扰时,本方法能够准确检测边缘直线和定位中心点。
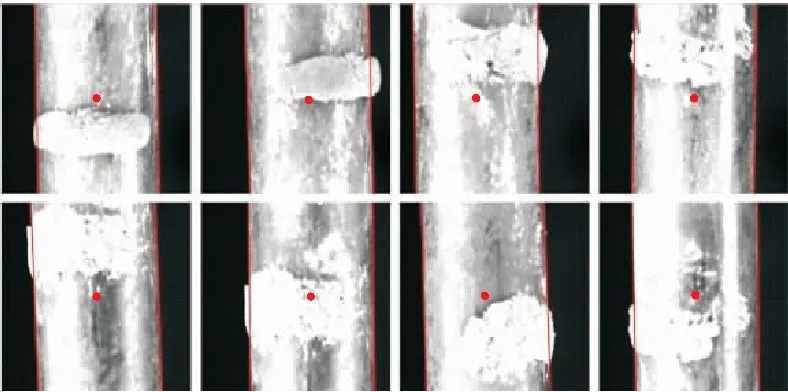
图7 传热管边缘带干扰测试结果
在同一光照强度下,采集边缘带干扰的传热管图像32张,标定所有图像中传热管的实际中心像素位置和传热管直径的实际像素距离,进行传热管边缘带干扰情形下的定位类比实验。传热管边缘带干扰的定位实验数据如表3所示。

表3 传热管边缘带干扰的定位数据
2.5 实验结论
根据3种环境条件下的实验结果,得到如图8所示的算法效果对比图。其中,边缘霍夫直线中心定位方法检测时间最短,但在3种环境条件下准确率最低、定位误差最高;目标阈值分割中心定位方法的光照强度适应性低,在不同光照强度环境下准确率低,但在光照强度不变的情况下准确率和定位误差与本文方法相差无几;本文方法光照强度适应性强、抗干扰能力强、泛化能力强,在不同光照强度环境下和不同位置、倾斜角度下,误检率和定位误差最低,即使在边缘带干扰的情况下,误检率和定位偏差在一定程度上增大,但本文方法的误检率和定位偏差依旧最低。

图8 算法效果对比
3 结束语
本文提出一种Canny边缘检测和边缘像素逼近聚类结合的核电传热管视觉中心定位方法,论述了方法的流程与原理。针对实际应用中的3种常见干扰,进行本文方法与边缘霍夫直线定位方法、传热管阈值分割定位方法的类比实验,验证了本文方法的精度、效率和泛化能力,这对推动相关技术的实用化具有重要意义。
