可视化维护引导系统设计方案
2021-06-22武雪荣
武雪荣, 苏 波
(航空机务士官学校, 河南 信阳 464000)
0 引言
机载武器系统是技术密集型的大型复杂机电系统,使用和维护程序多、标准高,还包括诸多易燃易爆的火工品, 危险性很高, 这对人员的维护能力提出了很高的要求。 由于维护人员客观存在训练时长不同、 知识层次不一、技术水平差异较大等特点,在工作过程中难以将所有的操作方法、步骤牢记于心,不能达到无差错的要求;在完成复杂程度高或危险性强的维护作业时, 工作效率较低。 利用实装进行技能训练时,受视线和位置的限制,难以完成多人同时带教,训练效率不高,加之带教标准不够统一,总体效果不尽如人意。 因此,拟建设可视化维修引导系统,搭建系统运行的硬件平台,设计可视化维护引导系统软件,达到演示和室内实习使用的程度。引导系统的建成将在维护训练、实践教学等方面发挥重要作用,具有显著的军事和经济效益。
1 引导系统的结构组成
机载武器可视化维护引导系统以增强现实技术为核心,结合语音识别、体感识别和多媒体技术,是教学手段的一种创新。 可视化维护引导系统由软件和硬件两部分组成。 硬件部分包括高性能计算机、虚拟现实交互设备和显示设备。硬件部分是软件系统运行的公共平台。软件部分包括三种不同功能的大型软件(开发平台),分别是用于沉浸式虚拟维修模块的DELMIA、用于桌面式虚拟维修模块的Ngrain 和用于虚拟仿真模块的Flightgear, 是整个引导系统的核心,负责整个场景的开发、运算、生成,同时连接和协调整个系统的其它各个子系统的工作和运转,与他们共同组成一个完整的引导系统。
2 硬件设计
该系统硬件部分由远程计算机系统、显示系统、跟踪定位系统、人机交互系统和数据传输系统组成。 硬件架构如图1 所示。
高性能计算机一般为的图形工作站, 对其CPU 的数据处理能力、存储介质的存储容量和读写速度、显卡的图形图像处理能力等的要求很高, 以满足超大容量的三维立体模型数据管理的有效性、图像画质的高清性、动画播放的流畅性和交互操作的实时性。

图1 可视化维修引导系统硬件架构图
显示设备用于显示虚拟环境的视觉形象。 显示端按照工作原理可分为两种: 视频透视式视频眼镜和光学透视式视频眼镜。 光学透视式视频眼镜在学员眼睛前面放置光学合成器。合成器是部分透明的,透过它可以直接看到真实世界。合成器又是部分反射的,可以看到从头上戴的显示器反射到合成器上产生的虚拟图像。 光学透视式视频眼镜原理见图2。 视频透视式视频眼镜封闭了视线,带有一个或两个摄像机,拍摄真实世界的场景。场景合成器负责把摄像机视频和图形进行合成, 并将结果送到显示器上。 视频透视式视频眼镜原理见图3。

图2 光学透视式视频眼镜原理图
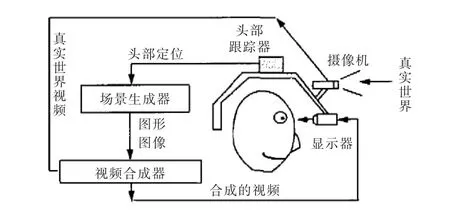
图3 视频透视式视频眼镜原理图
跟踪定位系统实时地检测观察者在场景中的位置、观察者头部的角度和运动的方向, 以便用来帮助系统决定显示何种虚拟物体,并按照观察者的视场重建坐标系。目前的增强现实系统主要采用电磁跟踪器、惯性跟踪器、测距仪、超声波定位仪、全球定位系统(GPS)等。用以探测和跟踪真实环境中目标的位置和方向。 本系统中为达到所需精度,将选用电磁跟踪器或惯性跟踪器。
虚拟现实交互设备主要有数据手套、位置跟踪器、数据衣、力反馈器等。数据手套用于模拟人手在装配或维修作业中的动作,通过接口程序,驱动虚拟手在虚拟环境中作相应的操作。 如抓取维修工具、拧螺丝刀等。 位置跟踪器、 数据衣用于在一定范围内获取人体的位置和肢体的运动。反馈装置主要是使虚拟装配或维修作业具有力感,营造更加逼真的虚拟现实环境。
3 软件设计
可视化维护引导系统的软件整体框架设计见图4。 可视化维护引导系统涵盖了增强现实技术的很多方面,包括引导信息、图像合成、操作者操作和操作状态检测4 个方面。 各个方面相互配合组成一个完整的引导系统。
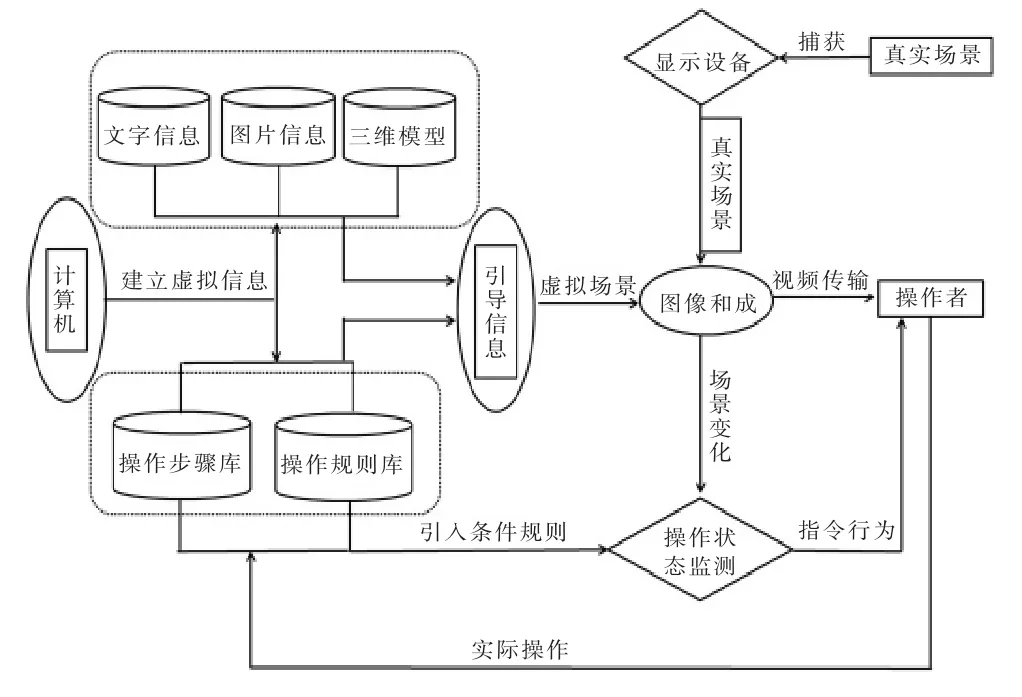
图4 软件整体框架设计图
引导信息是由计算机模拟出来的一些二维、 三维信息以及维修过程所规定的指令性文件, 包括完成维修任务的技术指令、维修标准和注意事项,为维修人员提供维修活动的依据以及遵循的规定和程序。 系统中引导信息主要包括三维几何模型、场景、文字和装配关系特征。
图像合成主要是让三维模型和真实场景物体融为一体,给操作者逼真的感觉,能够更好的帮助操作者进行维修。系统采用基于虚拟模型的虚实融合方法,与传统的基于三角面片的虚拟物体重构法相比,虽然要进行预处理,且需预知真实场景的详细信息, 但它实现简单, 实时性好,运行效率高.优于后者计算机生成的引导信息和摄像头摄取的设备真实场景利用图像合成技术, 采用基于标识的虚实融合方法融为一体, 通过光学透视式视频眼镜传送给操作者,这样就可以实时指导学员完成维护工作。
操作状态的检测是基于机载武器维护的规则体系,这个体系由C++程序里的DetectPrinter 函数控制。规则包括“什么时候检测到什么颜色或标识”,然后可以判断现在是什么操作状态。 具体规则示例见表1。
从表可以看出,座椅火药机构维护(示例)的条件规则库包括3 个步骤。与此一一对应有3 个状态的检测。当光学透视式视频眼镜摄取到的图像检测到任何一个条件规则时, 计算机就可以根据操作状态检测条件规则来判断当前的操作状态。
系统采用Unity3D 引擎,其优良的图像处理性能,多种多媒体格式及数据模型格式的无缝结合, 以及优异的跨平台支持情况和接口, 能够支持市面上常见的操作系统包括WINDOWS 操作系统、UNIX 操作系、MAC 操作系统、Linux 操作系统, 以及移动平台的Android、IOS 操作系统等主流系统。 该平台完全能够满足现阶段的开发要求并具备进行二次开发和功能的良好扩展性,为将来可能的二次开发做好技术铺垫。系统中使用该模块呈现给感官真实的增强环境, 把融合场景的左右眼视频信号分别输出给佩带头盔,显示复合立体图像。

表1 操作状态检测规则样
4 结束语
机载武器可视化维护引导系统以增强现实技术为核心,结合语音识别、体感识别和多媒体技术,是教学手段的一种创新。 该系统通过构建虚实结合的机载武器系统维护环境,利用身临其境的沉浸感和完善的交互功能,为情境式学习和建构主义学习提供了良好的环境, 逼真的再现机载武器系统操作过程并显示实时引导信息, 实现训练和维护操作的标准化和可视化, 提高使用维护安全性,节约训练时间和费用。所以本系统将在机载武器系统实践教学、维修训练等方面发挥重要作用,这对降低装备维护训练成本有着重要的经济和军事意义。
