宿舍智能分类垃圾桶的设计*
2021-06-21巴丽合亚卡里布汗
马 燕,巴丽合亚·卡里布汗
(新疆工程学院控制工程学院,新疆 乌鲁木齐830000)
利用单片机可设计智能垃圾桶。只需要使用一些小规模的集,就可以完成对智能垃圾桶的设计。有时候也可以采用一些专用芯片,比如利用时钟处理芯片来完成对智能垃圾桶的设计,还可以直接采用单片机的内部定时器来完成对智能垃圾桶的设计。这种设计方法的设计精度很低,因为单片机的定时器不是特别准确,而且时间长了会有一定的延时。但利用电子时钟芯片设计智能垃圾桶的方式是非常精确的,而且编程方式也很灵活简单,方便扩展。可利用单片机读取时钟芯片中的年月日等时间,并利用液晶显示器显示出来,利用按键模块对年月日等时间进行调整。
1 智能垃圾桶控制系统整体方案设计
本设计完成的智能垃圾桶,在垃圾桶外可利用红外传感器来检测人体是否靠近,当人体靠近的时候便可以推测此时需要投垃圾,通过控制步进电机来自动打开垃圾桶的翻盖。在垃圾桶顶部,设置了红外传感器来检测垃圾桶内部是否有足够的垃圾,当垃圾足够多的时候,便可以启动声光报警,提示人们及时将垃圾清除。系统整体如图1所示。
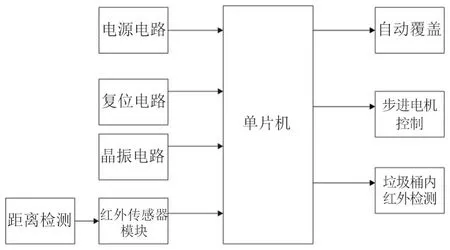
图1 系统整体框图
2 智能垃圾桶控制系统硬件设计
对单片机运行所需要的最小系统进行阐述,比如单片机在运行时需要电源持续供电,并且需要晶振电路给系统提供一定的时钟。单片机的复位电路也是单片机在运行过程中必不可少的。对本系统中时钟电路进行控制,用红外对管来检测人体是否靠近、垃圾桶是否装满,并利用步进电机驱动电路来实现对垃圾桶的翻盖设计,并设计有声光报警模块。
单片机的最小系统电路如图2所示。电源供电电路如图3所示。
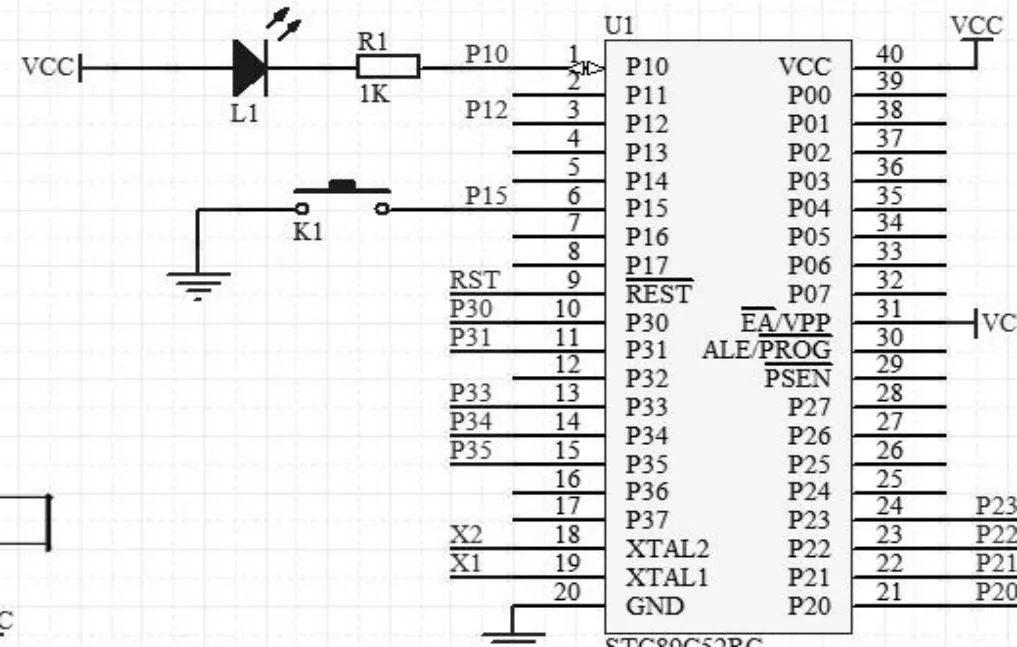
图2 单片机核心板电路
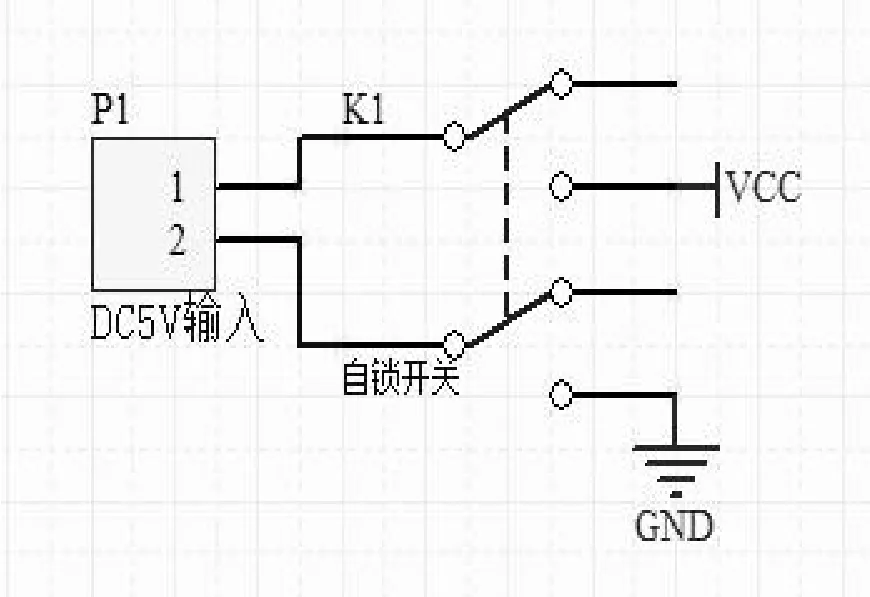
图3 电源供电电路
本文选择FC-15红外传感器,用尾部的电位器来改变敏感度,探测距离远。其工作电压为5 V,工作电流为10~15 mA。
垃圾桶内外红外检测模块电路如图4所示。
3 智能垃圾桶控制系统的软件设计
3.1 系统主程序设计
系统程序总体流程如图5所示。
3.2 垃圾桶翻盖程序设计
控制电机正在扭转这部分自动翻盖的设计。系统正式开始工作后,要确定电机是否需要向前转,必要时要将AB、BC、CD、DA电源实现正转,延时3 s电机正转之后转为反转,即为AB、AD、CD、CB充电。
电机驱动子程序流程如图6所示。
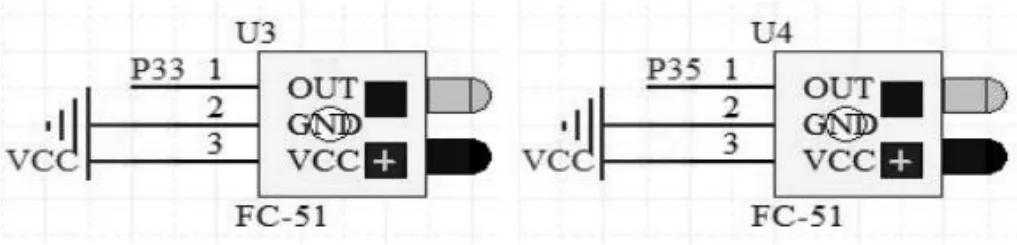
图4 垃圾桶内外红外检测模块电路图
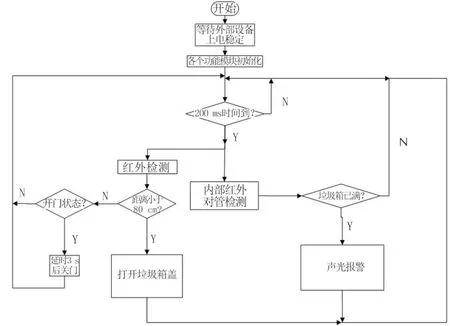
图5 系统程序总体流程图
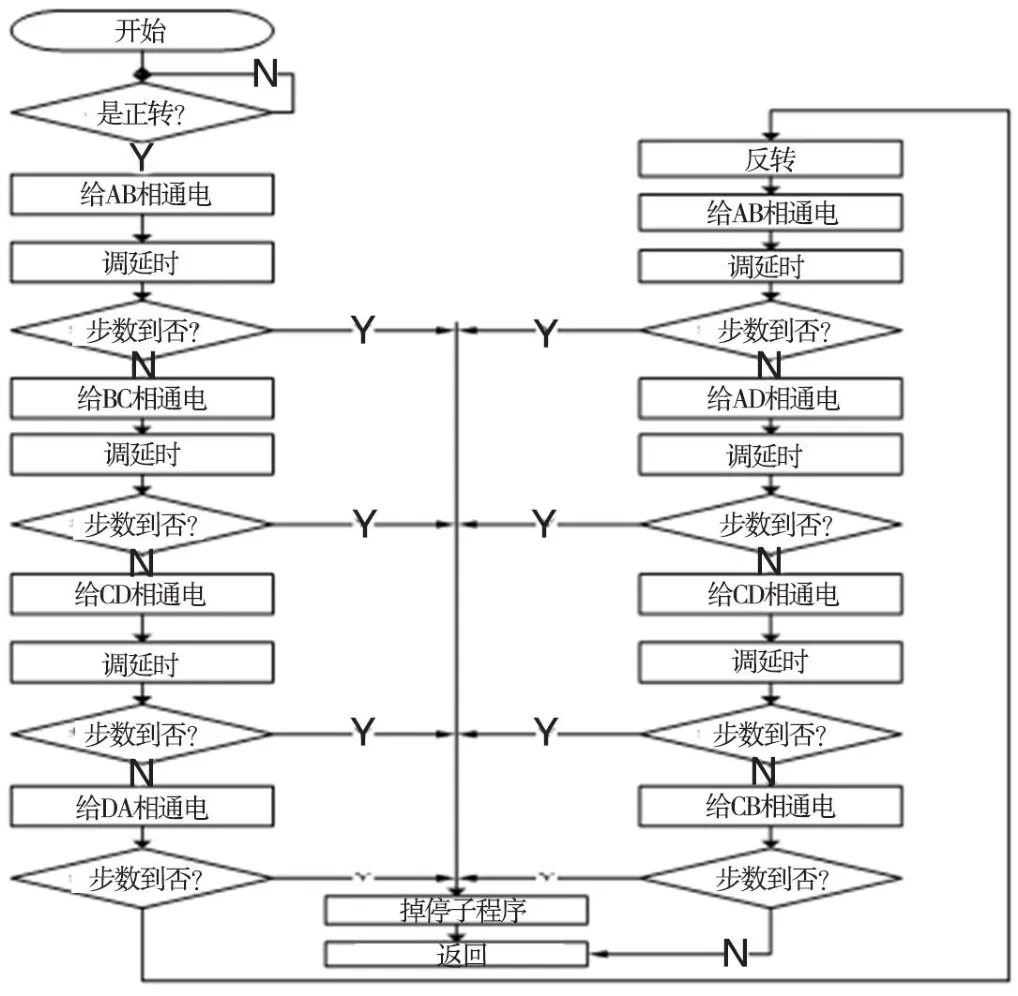
图6 电机驱动子程序流程图