表层漂流浮标系统超低功耗改进设计及实现
2021-06-20丁军航王岩峰
王 辉,丁军航,2,兰 勇,王岩峰
(1.青岛大学 自动化学院,山东 青岛 266000;2.山东省生态纺织协同创新中心,山东 青岛 266000;3.青岛大学 电气工程学院,山东 青岛 266000;4.自然资源部第一海洋研究所,山东 青岛 266000)
0 引言
漂流浮标作为重要的海洋设备,受广大学者研究。美国漂流浮标发展历史悠久,根据过去几十年定位和数据传输技术的改进,漂流浮标的研究和运营价值大幅增长。自2005 年以来,SVP 遍布世界各地,极大地提高了美国了解当前和未来气候变化的能力,与此同时,廉价、寿命短、可生物降解的漂流浮标不断发展[1]。近年来,我国浮标系统已经取得了一定成就,但还存在较多不足,相对于我国300 万km2海洋面积以及深远海水文探测,几乎是空白[2]。因此,漂流浮标将在以后的研究中扮演重要角色。其研究重点在于系统稳定的低功耗设计,通过国内漂流浮标系统的几十年发展,国内表层漂流浮标系统海上运行时间有限是重要的一方面,大致在1~2年,尚未很好地解决海上长期工作的问题。基于此,本文研究的重点为超低功耗的实现,对低功耗器件进行选型、软件优化实现、功耗测量计算,并对整体系统进行优化,使浮标系统更加合理、可靠。
1 浮标存在的问题及主要研究内容
表层漂流浮标作为抛弃式海洋设备,在保证系统稳定工作的前提下,其长时间工作能力成为研究重点。国内较多学者研究表层漂流浮标系统,并取得了一定成果。
1995 年,我国首次研究表层漂流浮标,设计浮标系统工作时间为6 个月以上;2011 年,国家海洋技术中心研制的Argos 表层漂流浮标工作可达600 天,大大提升了工作时间;2019 年,国家海洋技术中心研制的多参数多通信方式的表层漂流浮标采用锂电池与太阳能电池供电方式,理论工作年限2 年左右。
以上研究成果表明,低功耗设计为漂流浮标大多数研究的主要方向。有效提升浮标的长期工作能力,对于长时间获取表面洋流信息具有重要意义。基于此,本文在满足浮标系统工作需求的基础上,主要针对表层漂流浮标做以下几点改进:硬件系统低功耗设计,表现在低功耗器件比较、选型;浮标系统软件能量优化,卫星发射策略最优设计。
2 浮标硬件系统低功耗设计
浮标硬件系统主要分为两大部分,分别为系统主控制采集电路和卫星数据传输电路。系统硬件构成图如图1 所示,它是由数据采集系统、卫星发送系统以及用户数据处理终端构成。目前,正在运营的卫星通信系统有Argos 系统、北斗卫星导航系统和铱星系统等[3]。由于北斗系统覆盖范围有限,而漂流浮标大范围为远海投放,故采用铱星通信作为漂流浮标的通信方式。
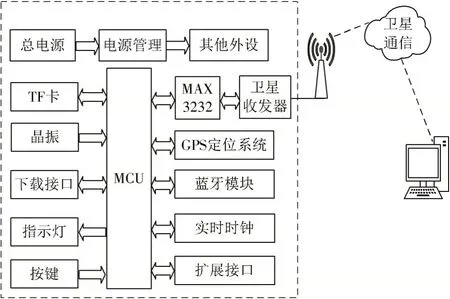
图1 系统硬件架构
数据采集系统承担数据采集、运行控制、电源管理、数据通信等功能[4],主要包括电源模块和控制部件。其以单片机作为核心部件,外围扩展GPS、外部RTC、蓝牙、TF 卡等器件来组成控制系统,用来调试浮标系统的工作模式,采集GPS 信息并存储。其中,单片机I2C 接口连接外部RTC 芯片,用来获取实时时钟,进而控制系统的启动时间以及数据发送时间;SPI 通信把数据存至TF卡;串口通信分别为蓝牙通信、GPS 数据通信、铱星接收板通信;铱星通信板采用自主研发的铱星模块9602 板,通信软件设计主要完成采集器与上位机的通信交互[5]。
2.1 电源优化设计
表层漂流浮标系统在海上长时间运行,所以电源设计至关重要。为了有效降低系统运行功耗,对于系统中的主要部件和芯片采用独立供电方式,在部件或芯片不工作时,采用切断电源的方式节省功耗[6]。主流稳压芯片对比如表1 所示,表中4 种芯片都为低功耗器件且可控,满足独立电源设计。就待机电流而言,MP2359 具有较大优势,按1 年损耗情况计算,W=0.1×10-6×8 760×14.4=0.000 876 W·h,相比其他对比芯片,待机模式下可节能10~30 倍。静态电流下MP2359 优势不大,APL5155 静态电流优势明显,但相同情况下,其待机电流损耗太大,为MP2359 的30 倍之多,而系统大多时间是工作在待机模式下,且芯片最大输出电流0.15 A,不符合设计要求。由此看来,APL5155 的表现不如MP2359。在满足功耗、电压、输出电流的优势基础上,MP2359 芯片开关性能良好,最大输出电流1.2 A,完全满足浮标系统的电源要求,在低功耗方面具有良好的特性参数。
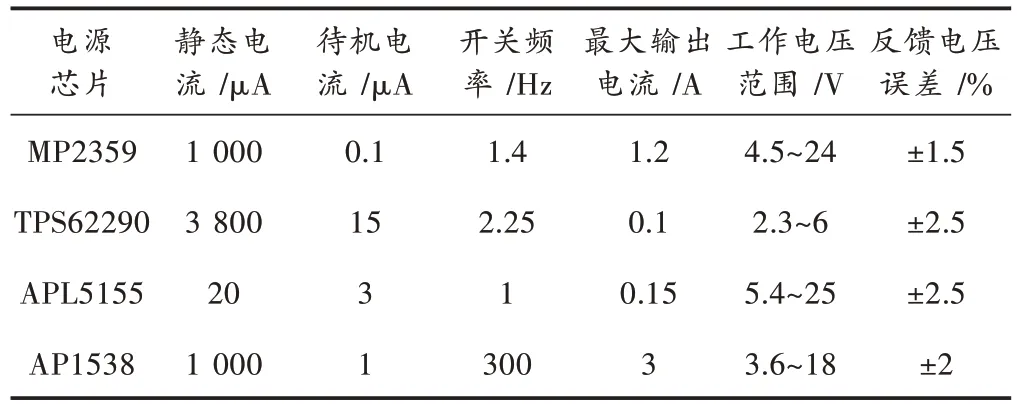
表1 主流稳压芯片参数
在电源输入端并入47 mF、0.1 mF、10 mF 瓷片电容滤波处理,以提升电源输出电流稳定性。由于浮标系统不需同时工作,根据所选模块功耗以及功能情况,供电采用4 组MP2359 进行供电,独立电源供电原则为供电负载远大于MP2359 运行功耗,控制各模块分时工作,最大限度减少运行功耗。4 组供电出于以下考虑:
1)达到待机模式下最小能量损耗;
2)设计GPS 最少运行时间;
3)蓝牙不消耗系统正常运行功耗;
4)其余大电流芯片能量优化。
由此设定供电方案:第1 路MP2359 为STM32、74AUP1G04永久供电;第2路MP2359控制GPS_NEO_6M;第3 路MP2359 控制蓝牙HC_05;第4 路MP2359 控制TF卡、MAX3232。
2.2 主控制器的选择
主控制器要求具备丰富的硬件接口,可使得漂流浮标的数据采集系统具有良好的可扩充性[7]。表层漂流浮标控制器选用芯片大多为MSP430、STM32,此两款芯片功耗较低且价格适中。对于低功耗来说,TI 公司生产的MSP430 系列单片机,系统工作稳定,开发环境方便高效,在处理混合模拟信号兼顾低功耗方面优势十分明显[8]。但其接口资源、I/O 数量较少,处理运算时,STM32的速度略快于MSP430,在做浮点运算时,速度远远快于MSP430。STM32 系列单片机是ST(意法半导体)公司推出的基于ARM 架构的32 位单片机,STM32 片上资源丰富,功能更加强大[9]。待机模式下STM32[10]仅消耗2 μA。在应对未来表层漂流浮标不再限定于简单功能的GPS 数据采集,在需要复杂运算的环境中,尤其是牵扯到GPS 浮点运算时,STM32 相比MSP430 占有较大优势,其硬件资源丰富的优势条件使软件优化更易实现。综合考虑以上情况,本研究采用STM32F103RCT6 作为系统控制器。
2.3 外部RTC 设计
表层漂流浮标要实现低功耗,外部RTC 必不可少。外部时钟为微控制器提供RTC 和系统时钟[11]。由于外部RTC 使系统定时启动,非海流计算所用时钟,理论无需精确时间。若误差较大,短期内无影响;但长期采集数据使系统乱启,会出现短时启动现象。因此,RTC 的精准性非常重要。为使表层漂流浮标系统含有精确的实时时钟,准时启动与发送数据,实现低功耗与数据可控。本研究采用了外部实时时钟芯片DS3231SN 工业级版本,与商用级相比,其温度范围大大增加,为-40~85 ℃。此芯片误差为1 min/a,闰年、日期补偿。两个可配置独立闹钟,为系统低功耗实现提供了可能。芯片工作功耗仅有200 mA,载有独立纽扣电池CR2032,绝大数情况下由纽扣电池供电,容量240 mA·h,全天候工作时间为=1200 h,即大约为3.3 年,可并联增加工作时间。几乎不耗费电池电能,在满足时间精度的前提下具有良好的低功耗特性,满足浮标系统设计和工作时间范围要求。
电路设计DS3231SN 供电方式为纽扣电池供电,VCC 不再接入电源,减少能量消耗。设计I2C 接口和单片机读取写入时钟和闹钟。为了完成系统长时间处于休眠状态且系统可控,在RTC 设计基础上增设74AUP1G04 芯片,当设置闹钟与当前时钟相匹配时,DS3231SN 的SQW 引脚输出低电平,此低电平通过此芯片进行反向,WKUP 连接单片机唤醒引脚,进而实现闹钟唤醒浮标系统的功能。芯片功耗极低,工作时仅有0.9 μA。
2.4 GPS 数据采集存储低功耗设计
表层漂流浮标最重要的功能是GPS 定位,它的精度和稳定性直接影响了整个系统的工作。设计采用GPS_NEO_6M 模组,主要考虑到表漂为一次性使用设备,其精度实际测量为1~5 m,在满足精度要求的基础上,价格是重要的考虑因素。设计可充电后备电池,可以掉电保持星历数据,减少GPS定位所需时间,减少大量功耗流失。此表层漂流浮标采用的是NMEA 0183 协议中的$GPRMC(推荐定位信息)。自主研发铱星通信板单次数据包仅传输340 B,由于数据过多会影响数据传输准确性,增加系统功耗且增加通信费用。本研究采用数据压缩处理功能,提高数据发送量,减少铱星通信板工作时间,大大降低了系统功耗。文件管理系统嵌入单片机,方便数据读取存储,控制器获取的GPS 字符串通过解析处理,软件编程压缩转换成数字。解析结果存入TF 卡中,每一组设定14 B,包括UTC 时间、经纬度信息等。电路设计选用法拉后备电池为GPS 模块保存星历数据,有效控制GPS 定位时间在1 min 之内。外部扩展大容量TF卡,大量存储数据,采用SPI通信方式,高效传输。
2.5 系统设计原理与实物图
系统设计原理与实物图如图2、图3 所示。
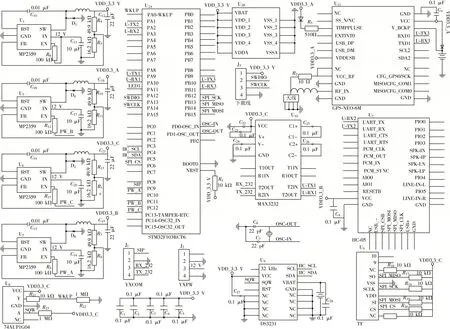
图2 系统设计原理
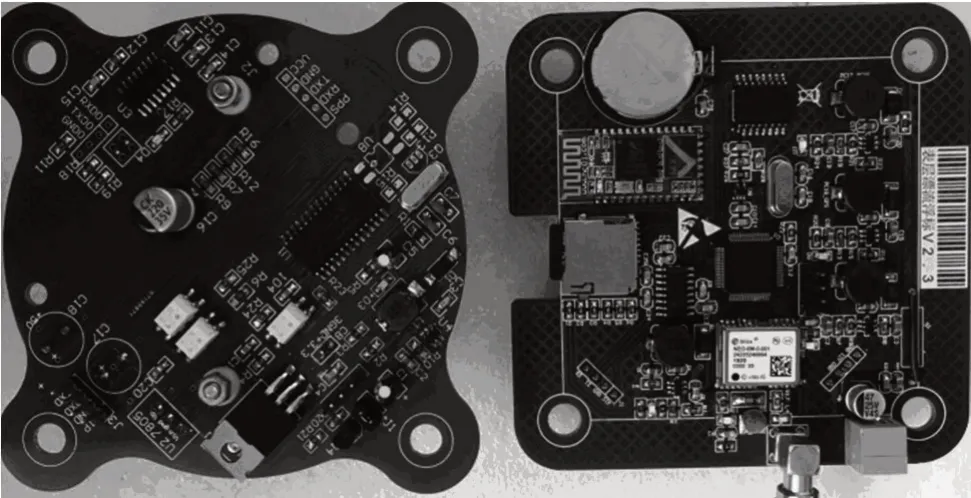
图3 系统实物图
3 软件节能设计
3.1 能量优化软件系统设计
在自主设计的电路板基础上,实现了如图4 的软件流程。其中最为重要的是软件优化问题,为了避免程序跑飞和死机等情况,系统设计采用两种策略:一是在内核代码中加入软件看门狗功能;二是在硬件设计上增加系统复位电路[12]。
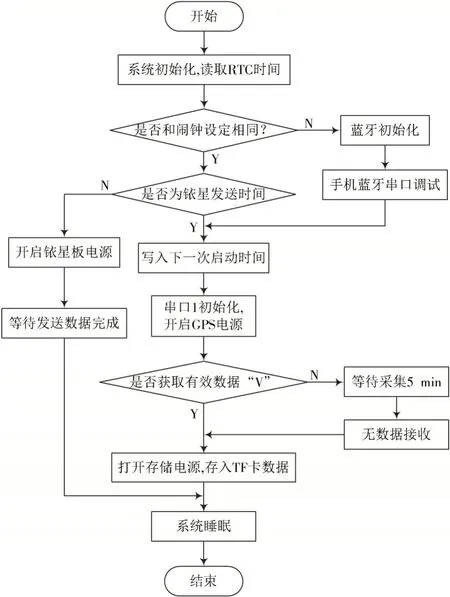
图4 系统流程图
经过数月的软件测试实验证明,系统人为上电后,蓝牙只有在非闹钟唤醒的情况下启动。实验结果表明,只有在人为上电的情况下蓝牙启动,且可收发数据,使用便携稳定,具有良好的实验效果。蓝牙设置完毕后,写入下次启动时间,蓝牙不再继续工作。进入GPS 采集,由于海上环境复杂多变,而系统最为重要的是长时间稳定工作,设定5 min 数据未接收,则系统进入睡眠。实验结果表明,5 min 可满足GPS 获取有效定位时间。GPS 后备法拉电池满足模块保存2 h 左右的星历数据。铱星通信板由于天气情况信号质量等因素,发送一次数据包的时间不超过5 min。此软件流程可有效防止系统因各类错误导致系统长时间运行,且提高了海上运行安全,减少了能量消耗。
3.2 最优发射策略
铱星发送策略设计目标为铱星启动次数最少、运行时间最短的低功耗设计。在此基础上考虑洋流变化较大时数据无法实时传输,为方便用户及时获取洋流变化,系统铱星发送策略如图5 所示。首先1 包数据最大化设计,可有效减少铱星发送次数,在此基础上考虑周期T的大小,由此决定是否启动铱星来获取最新洋流变化数据。整体上每天一次铱星启动,多包发送,在遇到局部洋流变化较大情况时实时传输数据,保证铱星启动次数最少的情况下及时获取洋流变化。另外,检测铱星信号较弱时,停止铱星启动,更换下一时间段进行传输且在上一个数据包告知用户。此设计使铱星板启动时间最少,满足低功耗设计,且对于数据实时传输性、可靠性方面均有改善。
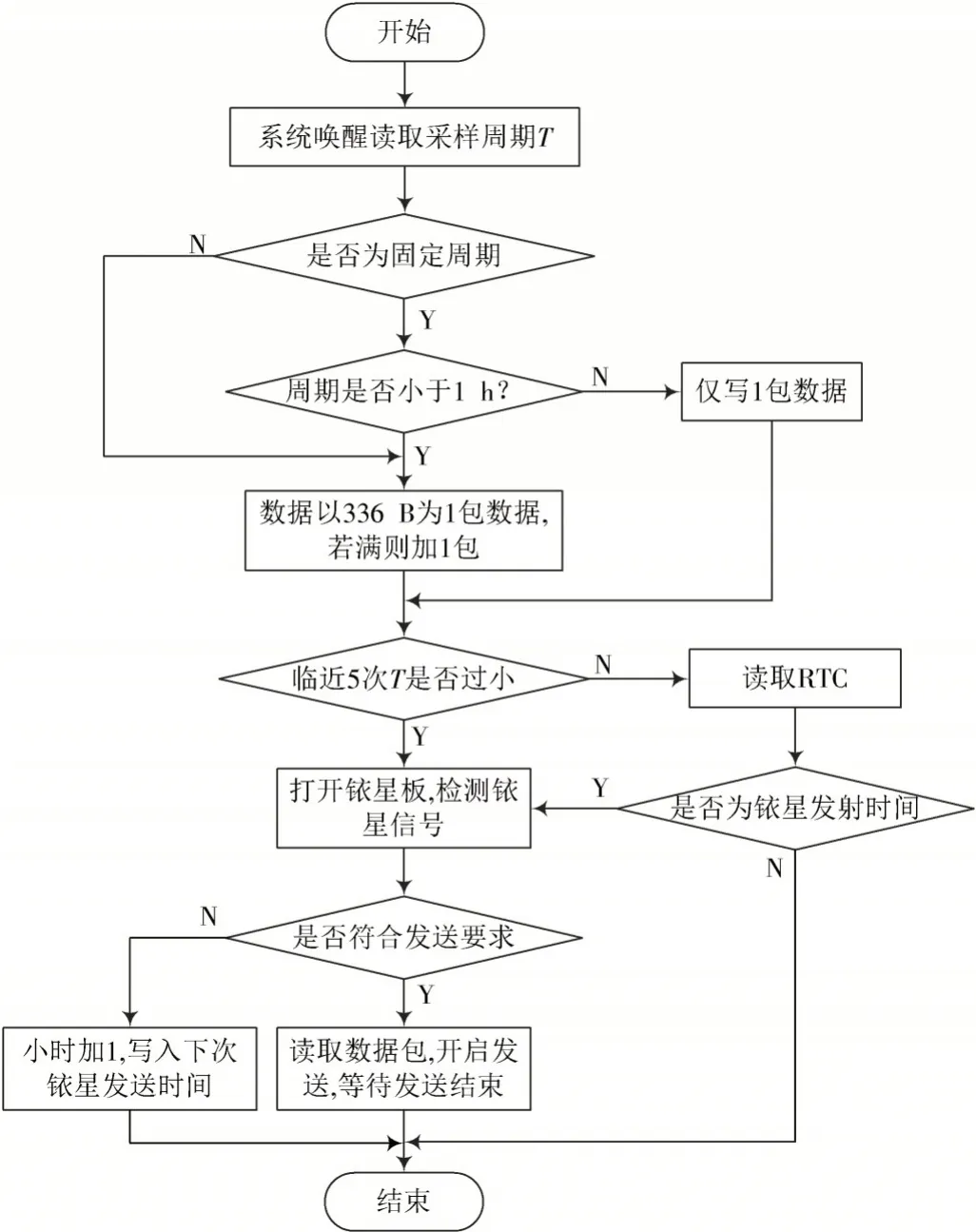
图5 铱星发射流程
4 测试结果
在系统软硬件稳定可靠的基础上,对电路板功耗进行了测量及分析。功耗实测表如表2所示。控制模块包括单片机最小系统、电源管理、DS3231、反向器及MAX3232。
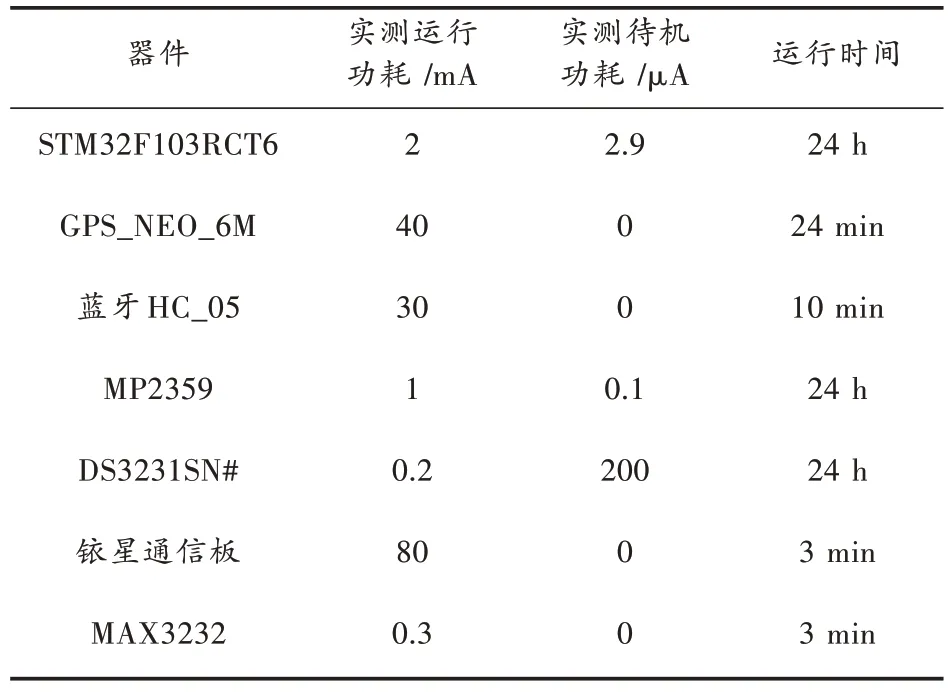
表2 功耗实测表
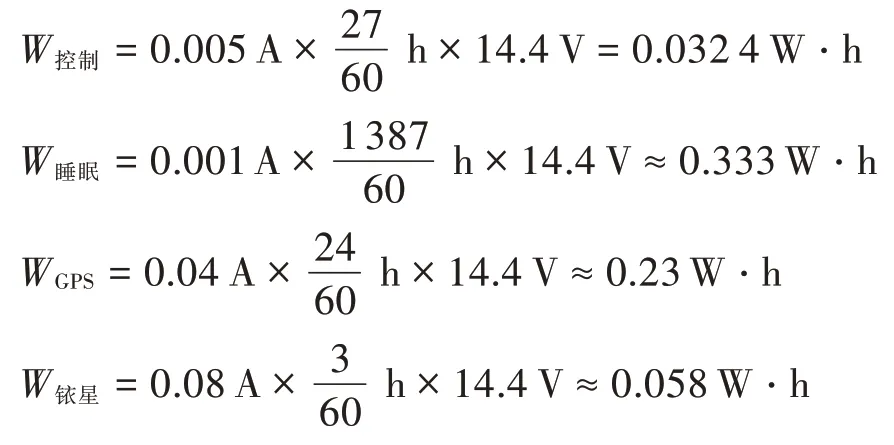
工作模式下一天功耗为:

选用的电池为惠州亿纬锂能股份有限公司生产的EVE 品牌型号为ER34615 的能量型锂⁃亚硫酰氯电池[13]。采用四串四并16 节EVE 电池方式构成电池包,电池包额定电压14.4 V,尺寸为70 mm×120 mm×130 mm,重1.6 kg,总能量为3.6×4×19×4=1 094.4 W·h。综上所述,计算实际预估工作天数:

由实测电流数据可以计算出此系统在正常工作模式下理论工作时间为1 683 天,即4 年8 个月左右。
5 结语
本文通过分析目前表层漂流浮标存在的工作时间能力及其他部分问题,改进浮标系统的硬件电路,采用可控电源、低功耗器件构成系统,并实现其功能;使用大内存TF 卡大量存储数据;数据压缩处理,使得每一组数据为14 B,有效减少铱星的启动次数与数据发送量;蓝牙HC_05 电路的加入,使播放更加简单,使用方便;铱星发射策略的改进设计,使系统发送数据更合理,铱星工作时间得到有效降低,减少能量损耗。经测试,系统在功耗方面有了明显的降低,为下一步海上投放做了充足的准备。
