基于三维激光扫描技术的建筑立面应用研究
2021-06-18黄文嘉
黄文嘉
(广州市城市规划勘测设计研究院,广东 广州 510060)
目前常用的建筑测绘方法主要有传统测绘法、近景摄影测量法和三维激光扫描技术测量法,其中,传统测绘方法主要采用手工测量或传统测绘仪器测量;近景摄影测量法通过在地面摄影测量的方式实现;三维激光扫描技术则通过扫描获取建筑物的特征信息,通过后期处理得到建筑物二维立面图、三维线划图和三维模型[1]。相较于传统的测量手段,三维激光扫描技术能在多种环境下全天候作业,采用主动发射激光的方式,无需直接接触目标物,即可获取目标物表面的点云数据[2],还能在扫描过程中实时、动态显示扫描数据,并采用数字化方式储存,以便后期各种建模软件的处理与输出。
1 点云数据采集
数据采集要准备以下仪器设备:Riegl VZ-1000三维激光扫描仪、配套电池两块及其充电器、三脚架1 个、配套单反相机1 套、高分辨率数码相机1 台、笔记本电脑1 台。
在扫描作业时,首先在控制点位置架设仪器,必要时搭设平台进行扫描。通过与Riegl VZ-1000 扫描仪配套的RiSCAN PRO 软件对目标进行数据采集:设置分辨率为10 mm 进行全景扫描,确定目标物所在区域的范围和方位,然后根据扫描需要,设置分辨率为2 mm,选取建筑物所在影像区域进行精细扫描,获取点云数据。检查点云数据的完整性,如有缺失或异常数据,应及时补测;若没有就命名并储存点云数据,进行下一测站的扫描工作,直至完成所有扫描任务。
2 点云数据处理
2.1 点云配准
使用Geomagic Studio2016 软件的全自动配准功能,一键将所有测站拼接起来。配准时需要选择1 个基准测站,基准测站配准过程中保持坐标不变,其他测站会与基准测站寻找公共部分,并通过平移旋转拼接到正确位置,因此,基准站必须是水平测站[3]。全自动配准具体过程如下:
(1)粗略配准。系统分析每个测站中所有竖直面并进行编号,计算出各个测站之间匹配的唯一解。
(2)精化配准。系统分析每个测站中的所有水平面,对配准结果进一步优化;然后使用迭代最近点法(ICP)让两个测站的点云数据拥有最大重叠率,并使得重叠区域有最小残差值。
(3)提取预览点云。预览点云相当于步长为6 进行采样。步长采样原理为: 将当前测站的点云数据视为一张以仪器位置点为中心的全景图,每个三维点视为1 个不会被重叠的全景像素。当所有像素均被提取时,步长为1;当每6 个像素提取1 个三维点时,步长为6。使用步长采样可以快速获取轻量化的稀疏点云,并保持现实世界的结构特征,有利于在自动拼接结束时,快速对拼接质量进行检查。测试地点1 为一条历史建筑街面,共扫描24 站,每个测站扫描2 min,外业总用时不到2 h。全自动拼接用时30 min,拼接完成后会自动显示配准报告,报告显示点云配准整体精度为4.7 mm,基于公共点的点云拼接如图 1 所示。
软件将两测站的对象点云,通过手动注册方式完成对点云数据的初始拼接:首先在视图窗口将两站点云视图,调整至相近方位,然后依次选取两站点云中的3 对公共点。公共点尽量选择带有明显标识性信息的点,如角点、拐点等。两站点云间的平均距离为9 mm,标准偏差为21 mm,拼接精度满足初始配准的精度要求。

图1 基于公共点的点云拼接
2.2 点云去噪
准备测量的建筑物位于越秀区较繁华街道,由于附近来往游客以及周围植被、建筑物等遮挡物的影响,获取的点云数据必然存在一些噪声点。噪声点不仅会影响三维模型的精度,还会影响处理速度,因此为了降低噪声对后续建模精度的影响,有必要对点云进行去噪,保证后期三维建模时的精度。噪声点主要是来往行人、杂乱的电力线、城市绿化、空气中的灰尘颗粒以及仪器本身造成的粗差点云等。
这些噪声点一般有以下几种处理方法:
(1)对于一些数据量大且人眼可直接观察的点云数据,可以直接使用点云处理软件中人机交互的方式,手动框选后将其删除;
(2) 对于空气中的灰尘,可以利用软件自带的“采样”功能,将其分离出去;
(3)剩余噪声多属于离群点,密度不均且离主体建筑物对象较为接近,手工删除效率较低、去噪效果较差,因此,可以选择软件的“去噪”功能,去除该类噪声。
项目扫描时间避开了上下班高峰期,行人、车辆较少,噪声点大多为树木、空气中的灰尘等。将三个测站的点云导入软件,发现数据存在噪声点云,影响点云配准的精度,因而,先通过软件“选择”功能中的“非连接项”和“体外弧点”选项,初步去噪。非连接点是通过与主体点云的距离关系,剔除与主体点云没有连接关系的噪声点;体外弧点是剔除与主体点云中绝大多数点云相距较远的噪声点。综合考虑去噪效果、去噪工作的时间消耗等多方面因素,可以发现当迭代次数为3 次时,最终结果最为良好,因此本次点云去噪流程,设置迭代次数为3 次。前两步去噪剔除了大部分噪声点。但是由于有部分灰尘颗粒,其反射率高于建筑物,或者较为接近地面的噪声点,难以依靠软件的去噪算法进行剔除,需要手动剔除,最终得到图2 所示的去噪前后对比图。

图2 点云去噪前后对比图
2.3 数据精简
扫描分辨率越高、目标物越大,采集到的点云数据量就越多,因为是通过重叠部分的公共点进行点云配准,所以点云会存在数据冗余,需要进行数据精简。
通过软件的“统一采样”功能,采用均匀抽稀的方法精简数据,并调整点云间的疏密,以避免点云疏密不均导致的数据不准确问题。精简后点云数量由850 万缩减至398 万个。
3 建筑物立面图的生成
建筑物立面图主要包含建筑物的外貌和外部结构信息、建筑各部分垂直方向的高度、外部装饰造型等。
以点云为原始数据,绘制立面图,其精度与点云精度基本一致,且立面图比例为1∶1,可以更精确呈现建筑物表面的纹理和结构特征。由于数据量十分庞大、CAD 加载的数据量有限,实际绘制之前必须对点云数据进行分割,然后再利用AutoCAD 进行绘制。
具体方法为:通过Geomagic 处理软件将点云模型进行平面投影处理,得到投影后数据,再进行提取并绘制。该方法提高了绘图效率,减少多余点云的干扰。具体操作可分为下列几步:
(1)本文案例的点云数据量并不多,可直接利用软件设置为las 格式,并定义坐标轴,将点云数据导出。(2)通过Autodesk Recap 将las 格式点云转换为rcp 格式。(3)通过软件的“附着”功能加载点云。(4)观察导入的数据是否为需要的视图方向,若不是就先调整点云的坐标系,使其与视图坐标系相同。然后定义平面,根据正射点云数据绘制立面图。(5)重复上述步骤建立建筑西面的立面图。由于该建筑物位于十字路口,沿街立面只有北面和西面,因此只需建立建筑物北面和西面的立面图,如图3 和图4 所示。

图3 建筑北面立面图
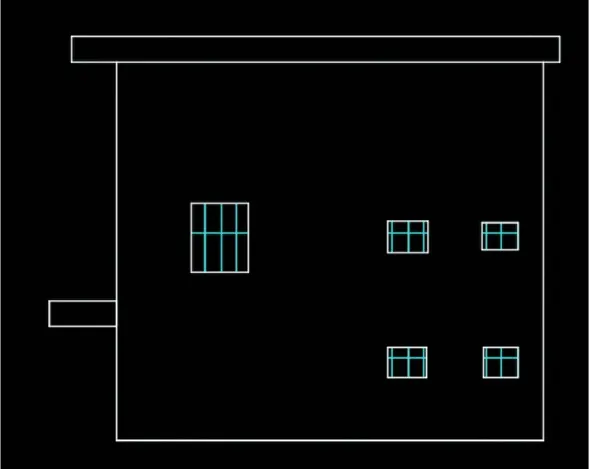
图4 建筑西面立面图
4 结束语
本文以广州市某大楼为例,详细阐述了大楼的外业数据采集流程及其注意事项和避免手段,对大楼点云进行配准、去噪、简化等数据预处理,总结与分析了实际数据采集过程中遇见的问题。基于大楼的点云数据,完成了大楼点云模型的建立,通过点云模型可以量测整个大楼的尺寸数据,为大楼的倾斜度、平整度检测提供了数据支持;通过绘制立面图、精度分析验证可行性,为以后大楼的立面改造提供了数据保障。
