基于ATxmega64单片机的电动轮椅控制系统设计
2021-06-17卢茹
卢茹
(广东省机械技师学院,广东广州,510450)
0 引言
电动轮椅是一种以蓄电池为能源、通过电子控制系统驱动直流电机运动,使用者可通过控制装置自行驱动电动轮椅运动,适用于下肢功能障碍的伤残人事使用,是一种比较理想的代步工具。
1 电动轮椅控制系统硬件设计
电动轮椅控制系统硬件部分由电源模块、电量检测模块、基准电压模块、OLED显示模块、按键及摇杆模块和电机驱动模块组成,电动轮椅控制系统硬件框图,如图1所示。
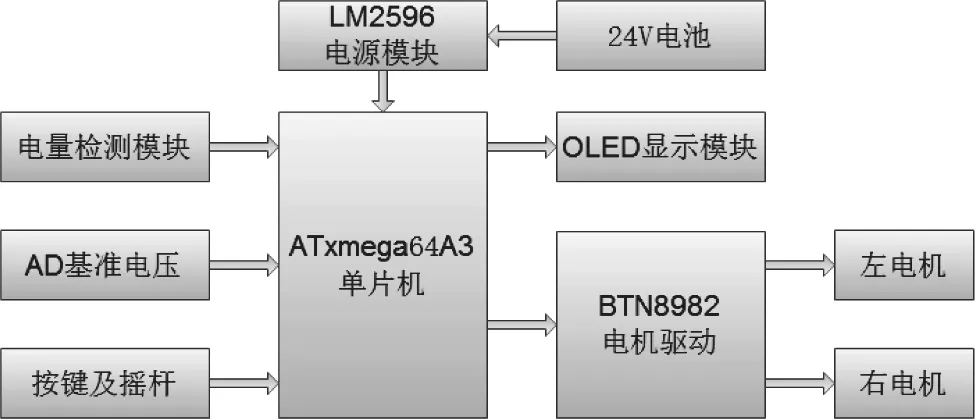
图1 电动轮椅控制系统硬件框图
■1.1 电源模块
电源模块采用LM2596稳压电路,由24V铅酸蓄电池提供输入电源,电源有S1开关控制,24V电源通过LM2596-12.0稳压电路,稳压输出12V电源,再通过LM2596-3.3V稳压电路输出3.3V电源,为ATxmega64A3单片机提供工作电源,该稳压电路可输出最大电流为3A,输入最高电压为40V。由D1发光二极管显示3.3V电源状态。电源模块电路图,如图2所示。
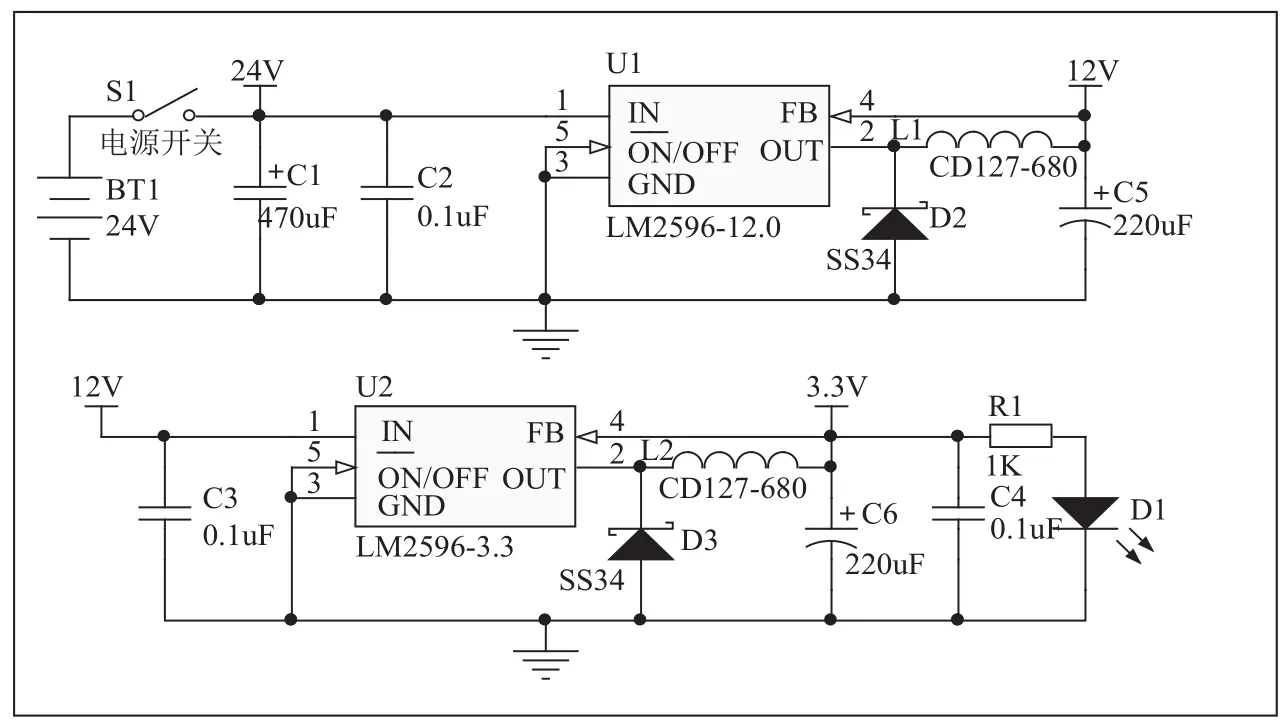
图2 电源模块电路图
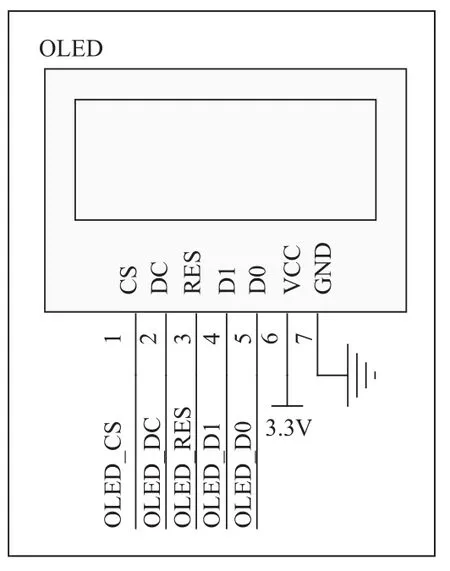
图3 OLED显示模块电路图
■1.2 OLED显示模块
显示模块采用1.3寸OLED显示屏,分辨率为128×64,OLED显示屏超低功耗,正常显示时只有0.04W,控制简单,可通过SPI或I2C控制,该显示模块采用SPI控制, 与ATxmega64A3单片机连接只需5个I/O口,亮度和对比度可通过程序指令控制。使用寿命长,不少于16000小时。
显示模块用于显示电动轮椅的工作状态,包含电池电量状态、轮椅行进的速度选择高速或低速状态、轮椅行进的方向信息前进或倒退状态等。同时各参数设置的信息,用于人机交互显示,包含屏幕亮度和对比度设置信息、电量低报警值设置等。
■1.3 电量检测模块
铅酸蓄电池的开路电压和荷电量是有对应关系是线性,因此可通过检测蓄电池开路电压来检测蓄电池电量,电量检测采用ATxmega64A3单片机自带AD转换器,检测蓄电池的电压,由于蓄电池的电压为24V,而AD转换器输入最大电压为3.3V,采用R11和R12高精度电阻,对蓄电池电压进行分压,再通过AD转换器检测蓄电池电压,为保证AD转换器的转换精度,采用TL431为AD转换器提供基准电压,电量检测的结果通过OLED显示屏显示蓄电池电量,当电量低于设置的报警值时,报警显示“电量低,请充电!”,提示用户尽快充电。电量检测电路,如图4所示。
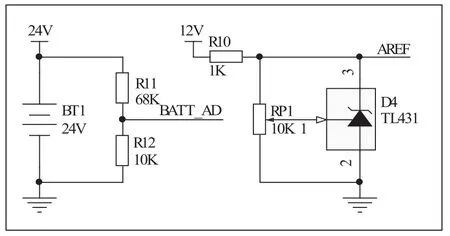
图4 电量检测电路图
■1.4 按键及摇杆模块
控制系统由1个急停开关、7个按键和1个十字摇杆组成电动轮椅运动控制和系统设置。S2为急停开关,用于紧急情况下停止,系统上电或急停后需按下S3启动按键,启动控制系统电动轮椅才可以正常工作,同时OLED显示屏显示“正常运行”。
控制系统启动后,可通过S5高速或S6低速按键,选择电动轮椅的行进速度,默认为低速状态,只有按下S4使能按键,推动十字摇杆可控制电动轮椅的前进、后退、左转、右转,当松开S4使能按键,电动轮椅自动停止,当电动轮椅在高速前进时,切换为后退时,系统自动切换为低速模式。十字摇杆X轴和Y轴分别连接2个10k电位器,通过推动十字摇杆,来改变电位器位置,同时改变ADC1和ADC2输出的电压值,通过ATxmega64A3单片机进行AD转换,计算摇杆的状态,从而控制电机的运行方向和速度。按键及摇杆模块电路图,如图5所示。
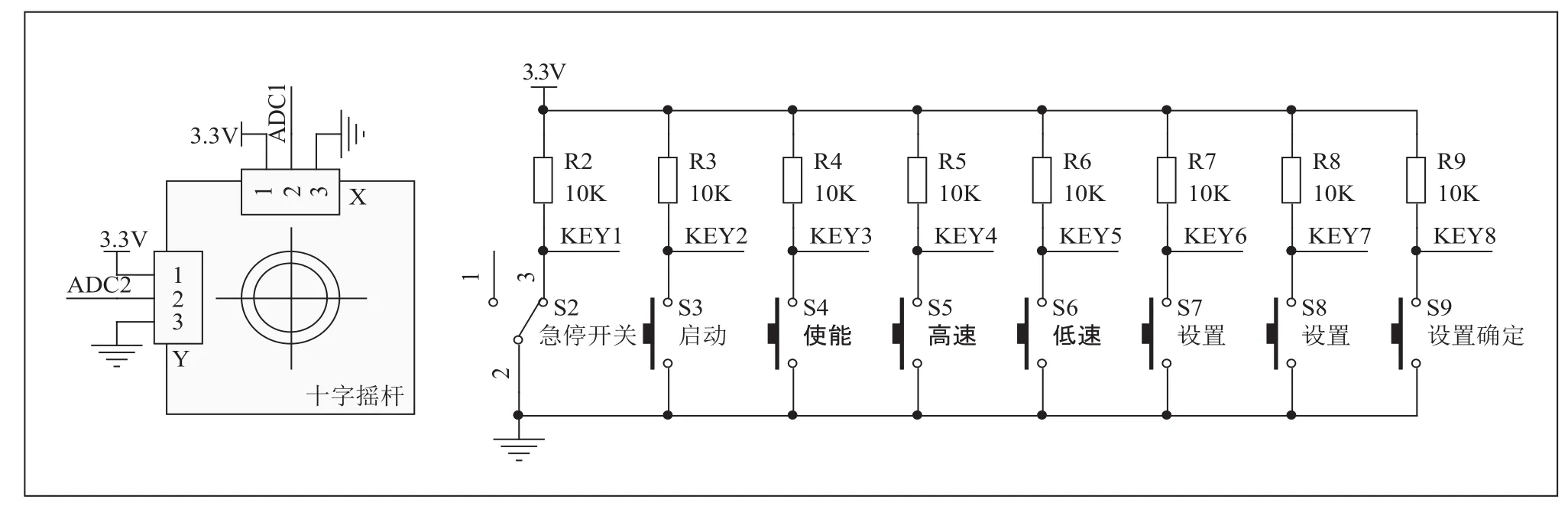
图5 按键及摇杆模块电路图
■1.5 电机驱动模块
BTN8982是一个完全集成的大电流的半桥电机驱动芯片,采用两个BTN8982芯片组成全桥电机驱动电路,实现电机的正反转及调速。
电机驱动模块采用四个BTN8982芯片组成两个全桥驱动电路,分别控制轮椅的左右电机,实现轮椅的前进、后退、左转和右转控制。ATxmega64A3单片机通过6个控制信号通过74HC244对8982进行控制,M1+和M1-用于控制左电机正反转,M1_PWM用于控制左电机的转速,M2+和M2-用于控制右电机正反转,M2_PWM用于控制右电机的转速,实现左右电机的正反转控制和无级调速。其中74HC244起隔离作用,用于隔离驱动电路和控制电路。电机驱动模块电路图,如图6所示。
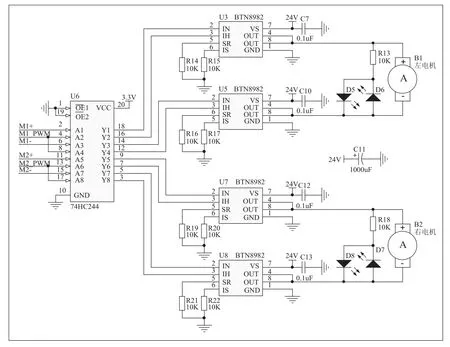
图6 电机驱动模块电路图
2 系统软件设计
电动轮椅控制系统采用模块化程序设计,软件设计主要包括电动轮椅运动控制程序、按键及摇杆程序和OLED显示程序。
电动轮椅运动控制程序:系统上电后,急停复位状态,按下启动按键,系统启动,此时可根据需求选高速或低速运行状态,按下使能按键,推动摇杆,电动轮椅摇杆控制运动,松开使能按键或按下急停开关,电动轮椅自动停止。
OLED显示程序:系统上电后,显示电池电量,同时根据系统的各运行状态显示相应信息,同时轮椅在停止状态时,可根据按键操作,设置系统的相应信息。电动轮椅控制系统程序流程图,如图7所示。
图7 绿基色信号波形
3 结束语
本文以电动轮椅的运动控制为背景,根据控制系统的硬件设计和软件设计,经调试和试运行,技术达到预期要求。本文论述了整个系统的工作原理以及硬件和软件的设计方法。在实际应用中,基于BTN8982的特点,使轮椅的运动控制更加稳定和灵活。给残疾人的生活带来方便。
