基于多重相干法的汽车路面噪声分解
2021-06-16彭川严辉任冬康润程褚志刚
彭川,严辉,任冬,康润程,褚志刚
(1.重庆大学 汽车工程学院,重庆 400044;2.襄阳达安汽车检测中心有限公司,湖南 襄阳441004)
汽车车内噪声控制是汽车研发过程的关键环节,随着动力系统噪声得到了良好控制,路面噪声越发成为车内噪声的主要来源。路面噪声主要由两部分组成:一部分是由轮胎和路面相互作用产生的空气辐射噪声经过车身孔缝向车内直接传播或透过车身板件向车内透射的空气声;另一部分是路面不平度激励,经由悬架传递到车身并引起车身振动进而向车内辐射的结构声[1]。将路面噪声进行来源分解并准确计算各噪声源的贡献量,对进一步的噪声对标分析及控制具有指导意义。
传递路径分析(Transfer path analysis,TPA)是一种基于“源-路径-贡献”模型解决振动噪声问题的试验技术,通过对激励源和传递路径进行分解和贡献量量化,找出对目标噪声起主导作用的环节,为车型的声学性能设计开发提供数据基础[2-3]。TPA从数据处理域来说,可分为时域TPA和频域TPA[4]。时域TPA的工作载荷分析与路径贡献量计算在时域实施,通过将测量得到的频响函数转换为单位脉冲响应函数,并构造相应的反卷积及卷积滤波器对时域工况数据进行滤波,进而得到源工作载荷和路径贡献量的时间历程。时域TPA不仅能得到各路径贡献的可视化结果,而且能够进一步对各路径贡献进行回放试听。基于时间历程的声品质瞬态分析,能更直观、全面地理解和掌握噪声及其路径贡献特性,能够克服频域TPA在瞬态工况传递路径分析时的局限性[5]。频域TPA的源工作载荷分析与路径贡献量计算均在频域实施,即将工况时域数据进行傅里叶变换转换为频域数据,结合频率响应函数来解析获得源载荷及路径贡献的频域结果,工况时域数据的傅里叶变换隐含着平均化处理,使其更适合稳态工况或者缓慢升降速等准稳态工况[6]。但相比于时域TPA而言,频域TPA的数据分析及处理更为简单。典型的频域传递路径分析方法有:阻抗矩阵法[7-8]、动刚度法[9-10]和多重相干法[11-12]。其中阻抗矩阵法和动刚度法的研究比较成熟,应用也比较广泛。相比于前两种方法,多重相干法更适合对路面噪声来源进行快速分解,通过将相关性很强的信号分到同一信号组,形成若干彼此不相关或相关性很小的信号组,计算各组对目标噪声的贡献率[13]。该法不仅充分考虑了路面噪声来源之间的弱相关特性,而且无需测量传递函数,仅在常规试验基础上就实现源贡献量的快速分解,易于推广应用。
本文基于多重相干法,对某SUV汽车车内驾驶员耳旁噪声进行了路面噪声来源贡献量分解,探讨了该方法实际应用的适用工况,为该方法的正确应用提供参考借鉴。
1 多重相干法的原理
对于一个多输入单输出的线性系统,输出y的自谱Syy(f)、第i输入xi与输出y之间的互谱Sxiy(f)可分别表达为
式中:上标“*”表示共轭,N为输入的自由度数,Hi(f)和Hj(f)分别为输入xi和xj到输出y的频率响应函数,Sxixj(f)为激励xi和xj之间的互谱,Sxiy(f)为输入xi和输出y之间的互谱。输入xi与输出y的常相干系数为
式中:Sxixi(f)为输入xi的自谱。当输入xi与其他输入xj完全不相关且功率谱计算平均次数足够时,Sxixj(f)=0,式(3)可改写为此时常相干系数等于输入xi产生的输出与实测的总输出Syy(f)的比值;换句话说,输入xi产生的输出功率等于实测总输出功率与常相干系数的乘积,即反之,当输入xi与其他输入xj相关时,此时与输入xi相关的输出除了与该输入xi有关,还与其他输入有关。
可用多重相干系数来衡量一组彼此相关的输入信号引起的输出在实测输出中所占比例。假设一组相关的输入信号x1、x2、…、xI记其为列向量X=[x1,x2,…xI]T,与输出y对应的频响函数列向量为H=[H1,H2,…HI]T,上标“T”表示转置,记该组输入引起的输出的自功率谱为SyXyX可表示为

式中:上标“H”表示转置共轭,SXX=X*XT为该组相关输入信号的互谱矩阵。该组中各输入信号与实测总输出信号y的互谱构成的列向量SXy=可近似表示为

联立式(4)、式(5),该组输入信号与实测的总输出信号的多重相干系数可表达为

式中,上标“+”表示矩阵的广义逆。相应地,与输入信号x1、x2、…、xI相关的输出功率可以表示为

与常相干相似,公式(7)成立的精度依然取决于是否有其他输入与关心的这部分/组输入有关。运用公式(6)和(7)进行准确相干功率估计的关键是保证其他输入与所关心输入之间的相关性要足够小。式(4)中:SXX为I×I维厄米矩阵,根据谱分解定理,存在I×I维酉矩阵U和I×I维对角阵Λ=diag(λ1,λ2,…λI)使得SXX=UΛUH,令λ1≥λ2≥…≥λI,均为矩阵SXX的非负特征值,SXX的广义逆矩阵可表示为

2 汽车路面噪声贡献来源分解
2.1 试验设置
试验时加速度传感器(B&K 4535-B)和传声器(B&K 4189-A-021)布置如图1所示:4个三向加速度传感器分别布置在4个摆臂末端,如图1(a)所示;8个配有防风球的传声器分别布置在4个车轮前后,如图1(b)所示;在驾驶员外耳位置布置一个传声器用于测量目标点噪声,如图1(c)所示。

图1 传感器布置
试验在国家汽车质量监督检验中心(襄阳)的专用噪声路面进行,行驶时汽车首先以80 km/h匀速行驶一段时间,然后发动机怠速空挡滑行,滑行车速范围为80 km/h~50 km/h。并将整个实验过程分为80 km/h匀速行驶工况以及80 km/h~70 km/h、70 km/h~60 km/h和60 km/h~50 km/h 3个滑行工况。同时记录各传感器的振动信号和麦克风的声压信号。
2.2 源参考输入及分组验证
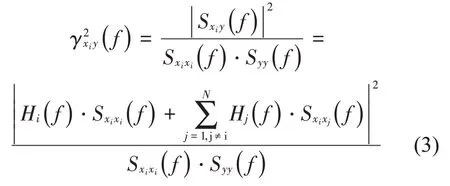
将所有输入信号看作一组,根据式(6)和式(7)计算其多重相干系数及多重相干输出功率,如图2所示。总体而言,在20 Hz~400 Hz内,各运行工况下的多重相干系数总体都在0.6以上,仅在个别频率点出现多重相干系数较低的情况;计算的多重相干功率总体上均略小于实测信号自功率谱,但在20 Hz~400 Hz以内与实测信号自功率谱整体趋势相同、吻合较好,表明该噪声频率范围内车内噪声的主要来源为路面噪声、且试验所设置的参考信号涵盖了目标输出点接受信号的主要来源。400 Hz以上两者相差较大,且频率越高相差越大,这归因于在该频率范围内,风噪声占比较大。
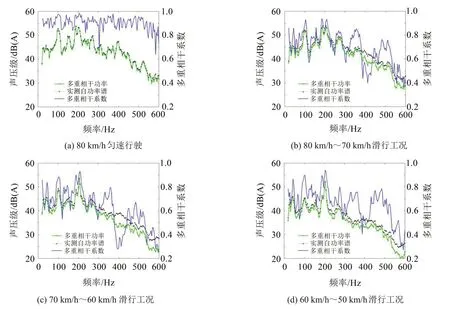
图2 源参考输入验证曲线
依据多重相干法思想,将每个车轮上的信号分为一组,共4组:左前轮组、右前轮组、左后轮组和右后轮组,如图3所示:每个小方格的行和列分别指向一个输入信号,方格的颜色代表了这两个输入信号常相干系数的大小。可见,在分析频率范围内,各车轮x,y,z方向加速度信号与附近声音信号彼此间的相干性比较大,而与组外其他信号相干性很小,即组与组之间的相干性很低,表明上述信号被正确分组。
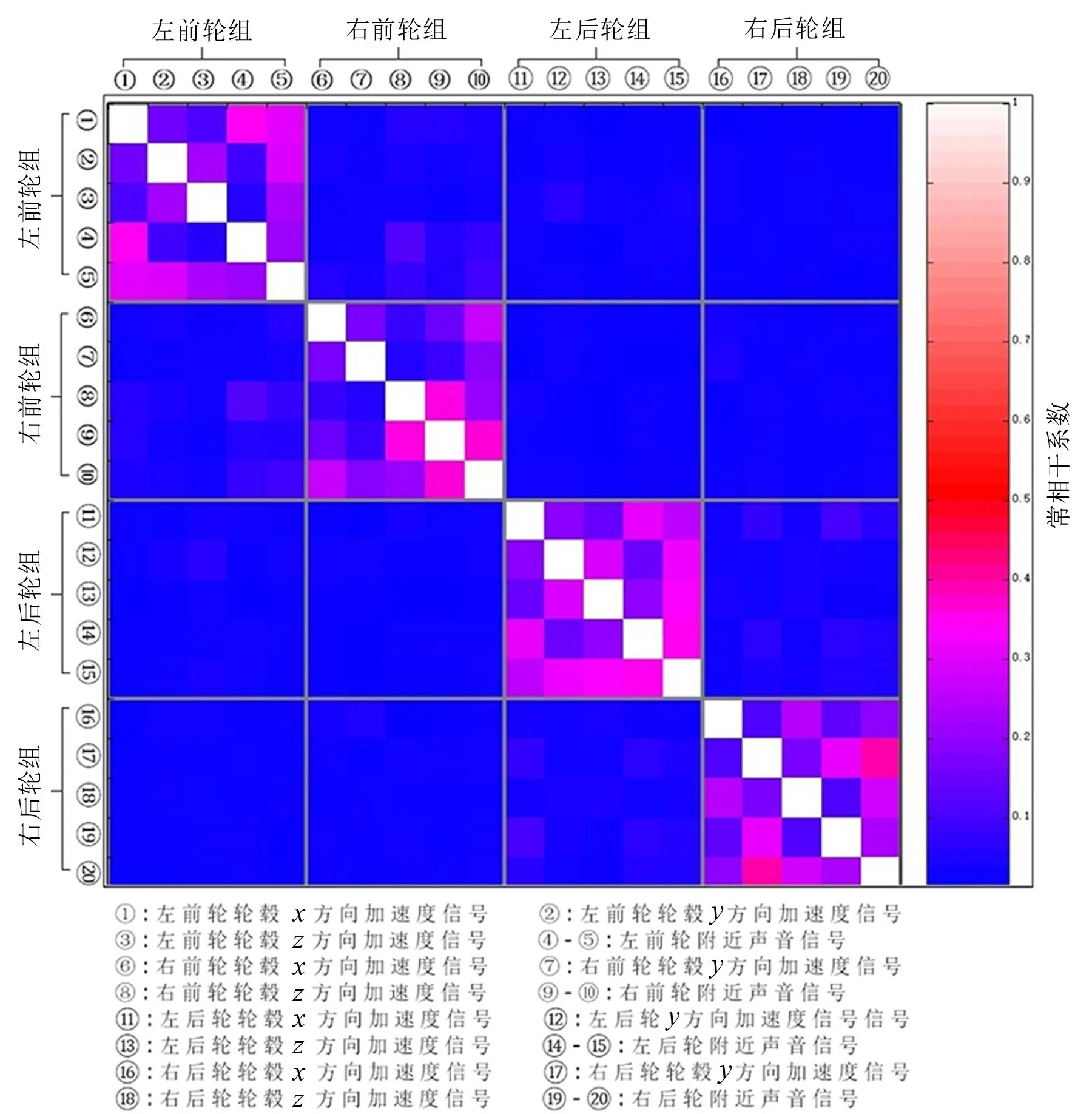
图3 源参考输入分组图
2.3 贡献量分析
路面引起的车内噪声的主要频率范围通常在20 Hz~400 Hz。利用式(6)和式(7)对上述测量得到的信号进行处理。目标点处的实测噪声和合成噪声如图4所示。
(1)合成噪声与实测噪声在20 Hz~400 Hz频率范围内趋势一致;
(2)在80 km/h匀速行驶工况时,合成噪声出现了过估计现象,与实测噪声绝对误差达到了2.2 dB(A);
(3)在各滑行工况下,合成噪声与实测噪声吻合较好,其绝对误差均在1.0 dB(A)以内。
分析其原因是在匀速工况下,在分析频率范围内的振动信号和声学测量信号很大一部分是来自于发动机激励,源参考量测量不准确,导致所有车轮组信号之间的相干性较大,进而导致出现了过估计。在滑行工况下,发动机处于怠速状态,目标点处噪声主要来源于路面激励,源参考量测量准确。综上所述,多重相干法用于汽车路面噪声分解时,更适用于滑行工况的数据分析,因此在后续分析中,将以该SUV滑行工况数据进行分析。
汽车以不同速度滑行时,各车轮对驾驶员外耳的噪声贡献量如图5所示。随着车速的降低,各车轮对目标点的噪声贡献量呈现降低的趋势。结合图4分析,最大噪声峰值点出现在204 Hz,第二峰值点出现在188 Hz,第三峰值点随着车速的不同而出现在100 Hz和168 Hz处。其中,频率点188 Hz和204 Hz在所有车轮处均以峰值出现,频率点100 Hz仅在右侧车轮处以峰值出现,频率点168 Hz仅在左侧车轮以峰值出现。

图4 实测噪声与合成噪声A计权声压级
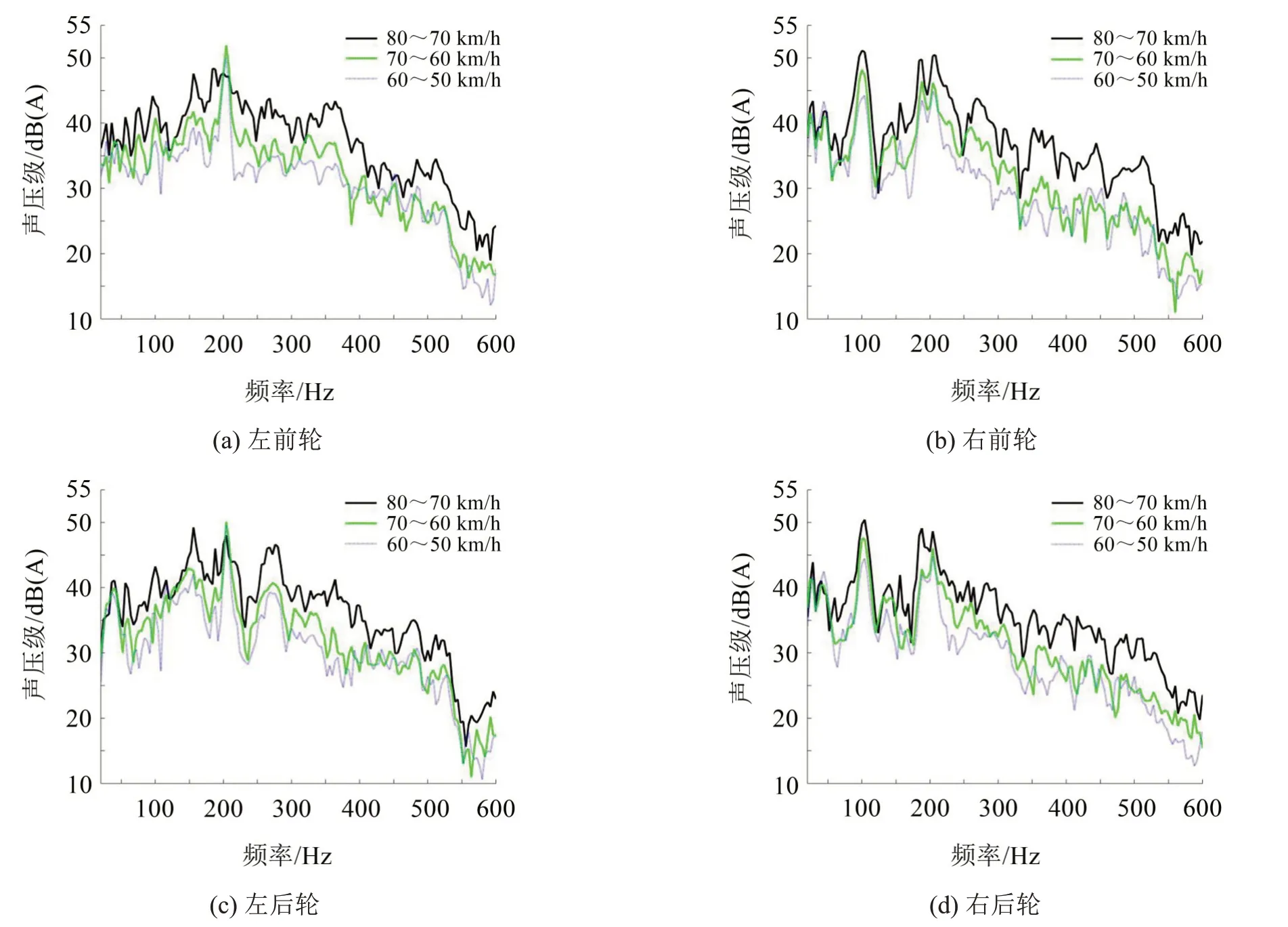
图5 路面噪声分解结果
根据分解结果可计算得到驾驶员外耳处合成的A计权声压级,并与实测的A计权声压级进行对比,如表1所示。工况1~3分别对应了80 km/h~70 km/h、70 km/h~60 km/h和60 km/h~50 km/h滑行工况,对于本次试验所用的车辆,4个车轮对驾驶员外耳的噪声贡献量相差不大,其中左后轮略大于其余3个车轮,为目标点的主要噪声源。
本次试验分别在沥青路面(试验1~3)和水泥路面(试验4~6)测试3次,共计6组数据。按上述方法得出合成噪声与实测噪声的总误差与平均误差,如表2所示:其中,T代表总误差,A代表平均误差。在分析频率范围内,各工况的总误差均在1 dB(A)以内,最大值为0.8 dB(A);各工况的平均误差范围为0.7 dB(A)~1.3 dB(A)。路面噪声分解结果准确。

表1 滑行工况噪声分解/dB(A)
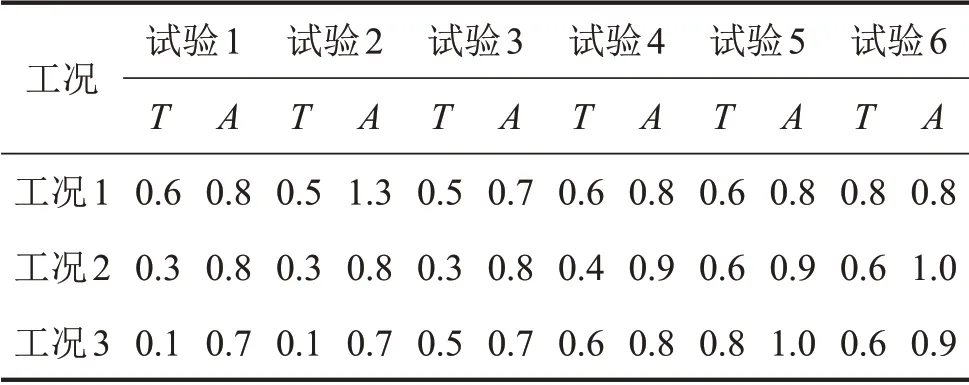
表2 试验误差/dB(A)
3 结语
针对某SUV路面噪声分解问题,采用了多重相干分解方法,以驾驶员外耳为目标点进行了路噪分解试验,分解了4个车轮在滑行工况下对驾驶员左耳处噪声的贡献量,基于上述贡献量的合成噪声与实测噪声在整个分析频率范围内,绝对误差均小于1 dB(A);平均误差范围为0.7 dB(A)~1.3 dB(A)。该方法基于路面噪声的部分相关特性,无需路径传递函数测量,仅需在常规NVH测量基础上进行数据处理即可,特别适用于在滑行工况下快速有效地分解路面噪声,简单易用。在汽车匀速行驶工况下,发动机处于工作状态,发动机为主要激励源,导致所有车轮组信号之间的相干性较大,进而易出现过估计,此时分析结果不准确。相比于匀速行驶工况,在滑行工况下,路面为主要激励源,各轮组相干性低,合成噪声和实测噪声吻合较好,路面噪声能够分解准确,估计合理。为多重相干法在汽车路面噪声快速分解的应用提供了借鉴参考。
