触发采集式三维超声成像系统的设计与实现
2021-06-16许程耀李赣萍黄庆华杨豪豪冯前进
许程耀,李赣萍,黄庆华,杨豪豪,王 青,冯前进
1南方医科大学生物医学工程学院,广东 广州 510515;2南方医科大学广东省医学图像处理重点实验室,广东广州 510515;3广东省医学成像与诊断技术工程实验室,广东广州 510515;4西北工业大学机电学院,陕西 西安710072
三维超声成像较多应用于妇产科检查、空腔脏器或结构较为简单的器官检查等[1-2]。目前,三维超声图像的常用获取途径有两种,一种是利用二维阵列探头(容积探头)发射体积超声束,从而直接得到扫描部位的三维容积数据[2-3]。这种方法操作简便,实时性高,但是容积探头扫描角度、深度以及成像分辨率有限,而且二维面阵传感器的并行处理技术、超声束的快速发射与接收技术以及显示技术等都极大提高了这种方法的实现成本[4-5]。第二种是利用二维超声设备的常规线阵探头,并结合空间定位装置,获取二维超声图像集以及图像对应的位置信息,然后通过算法重建三维超声图像[6-8]。近年来,三维超声成像研究主要集中在基于自由式扫描相关方面,虽然自由式三维超声成像方法对用户更加友好,但是其对三维成像硬件设备、位置信息的准确性以及三维重建算法等方面要求较高,基于本实验室目前的硬件条件,实现难度较大[9-12]。
三维超声成像重建方法主要包括两种方法:基于表面特征的重建方法和基于体素的重建方法。采用基于表面特征的重建方法对胎儿的三维成像中,胎儿结构在二维图像上被勾勒出来,不同结构的表面可以设定不同的颜色和阴影来增强可视性,最终形成直观的三维表面轮廓图,显示胎儿体表信息[13-15]。这种方法需要对脏器结构做复杂且精确的轮廓分割,仅仅显示了组织部分边界信息,忽略了细小的解剖结构、组织纹理等信息,对于研究组织细微解剖结构的三维超声成像,这种方法有一定的局限性。第二种重建方法是基于体素的重建方法,将一定数目的体素按照相应的空间位置排列,显示在三维立方体中。体素是三维空间中表达物体结构信息的最小单元,其由二维超声图像中的像素通过坐标转换[16-19]、插值[20-23]等方式映射至三维立方体的对应位置。多个体素依次排列最终构成完整的三维图像,三维图像通过切片或三维可视化显示在二维平面内。这种方法能够有效显示组织内部结构信息,但是二维超声图像的采集经常存在欠采样、过采样等问题,导致像素向体素的映射出现空洞或冗余,需要进行插值或加权等处理,所以基于体素的重建方法的重建速度较慢,对重建算法要求高[24-26]。
美国Verasonics提供了开放式多通道可编程超声成像研究平台,如Vantage128、Vantage256等。研究平台基于全MATLAB编译环境,研究人员可以全软件自定义整个超声系统的任一功能组件,如换能器阵列的集成定制、波束形成器的构建以及图像重建算法的嵌入等。用户也可以通过定义新的数据采集模式或图像处理算法来开发自己的超声成像系统,在实验室条件下对成像系统的功能进行快速评估。虽然该公司目前已开发出基于二维面阵探头的超声三维成像平台,但是现有的三维成像功能仍处于初始开发阶段,图像分辨率低,无法满足目前三维超声成像的相关研究需求。此外,其购置成本远远高于本实验室现有的Vantage128平台,且鲜有基于该型号平台的三维超声成像相关研究记录。
因此,针对上述问题,本研究充分利用实验室现有超声平台的优势,创新地提出基于触发采集方式并结合原理较为简单的机械扫描[27-28]进行三维超声成像的方法,旨在探究基于Verasonics Vantage128TM平台实现三维超声成像的可行性,实现本实验室的第一套三维超声成像系统,同时为基于超声平台的三维超声弹性成像、实时三维超声成像(四维超声成像)等后续研究奠定良好基础。
1 方法
VerasonicsTMVantage128系统硬件部分包含128个发射、接收通道,配有128振元线阵探头以及高性能计算机,软件部分可供用户对超声成像过程中的参数进行设定。本研究基于该平台,外部主要配备由步进电机控制的机械扫描支架与一块任意波形发生器,构建触发采集式三维超声成像系统。按照具体功能将其主要划分为3个部分:探头运动控制模块,数据采集存储模块以及重建显示模块。系统整体结构框图如图1所示。
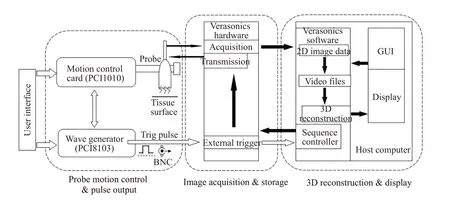
图1 触发采集式三维超声成像系统结构图Fig.1 Structure diagram of the 3D imaging system based on pulse-triggered image acquisition.
1.1 探头运动控制模块
超声探头运动控制模块的硬件组成包括一个单轴机械扫描支架和一台工控机,扫描支架上载有步进电机和超声探头夹,工控机内配有运动控制卡(PCI1010,北京阿尔泰科技发展有限公司)以及任意波形发生器(PCI8103,北京阿尔泰科技发展有限公司)。运动控制卡控制步进电机转动,进而带动固定在扫描支架上的超声探头移动(图2);任意波形发生器控制采集脉冲的波形、频率等参数和脉冲的发射,并通过BNC线传输至下一模块。该模块的主要功能是通过操作用户界面,控制步进电机,使超声探头进行定向定长机械扫描,同时控制波形发生器,完成触发脉冲与探头移动速率的参数匹配和脉冲发射传输工作。
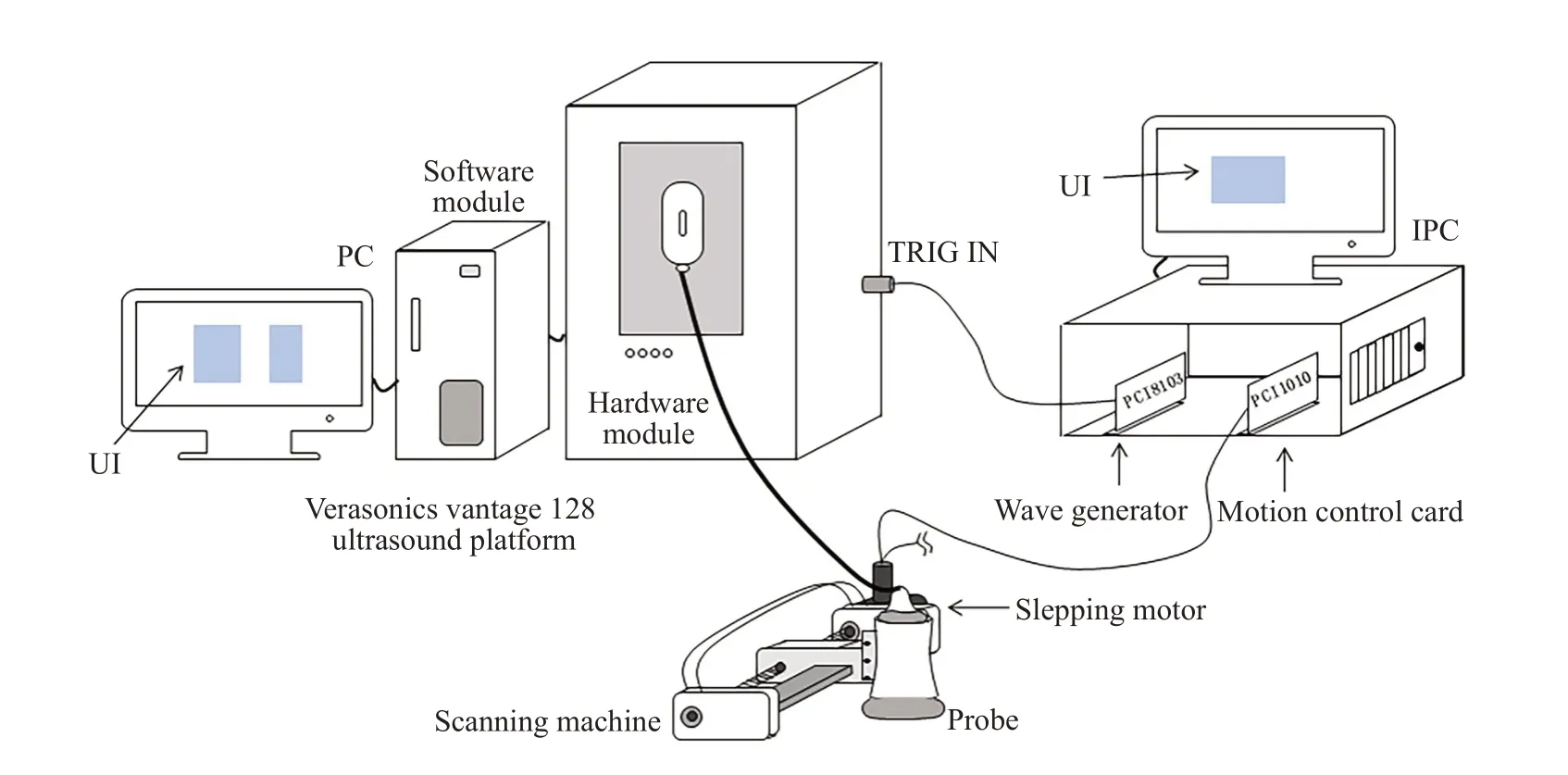
图2 三维超声成像系统硬件连接示意图Fig.2 Schematic illustration of hardware configuration of the 3D ultrasound imaging system.
将超声探头固定在扫描支架的探头夹后,运动控制卡产生的电脉冲驱动步进电机,从而带动探头移动。电机移动速率通常用秒脉冲数(PPS)表示,为方便计算本文利用公式1将其转换为探头移动速率D(mm/s)。

式中,n为秒脉冲数PPS,θ为电机步距角(°),p为扫描轴螺距(mm)。θ=1.8,p=3为扫描支架硬件固定参数,n为用户可设定的值,本文中均设置为n=300,即实验过程中超声探头移动速率D为4.5 mm/s。
确定探头移动速率之后,根据图像采集所需要的精度可通过编程定义波形发生器发射的触发脉冲波形与频率(公式2),以此脉冲触发图像采集。

式中,f为触发脉冲频率(Hz),D为移动速率(mm/s),σ为采集精度,本文中σ均设置为0.1 mm,因此触发脉冲频率均为45 Hz。
1.2 数据采集存储模块
数据采集存储模块主要由超声探头、任意波形发生器和VerasonicsTMVantage128开放式超声平台的硬件模块构成(图1)。其中,Vantage128超声平台硬件模块具有外部触发功能,其触发接口(图3)能够向外部设备发射脉冲信号(Trig out)或接收外部装置发射的脉冲信号(Trig in 1-2)。
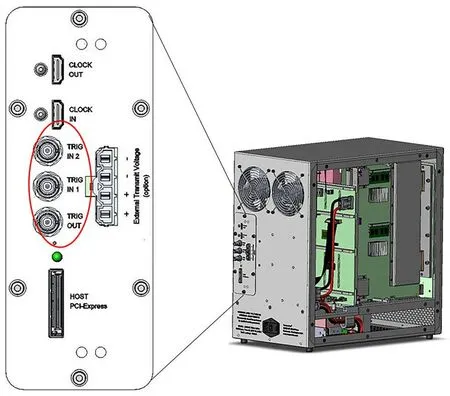
图3 开放式超声平台外部触发硬件接口图Fig.3 Trig interface of VerasonicsTM Vantage128 platform.
本研究将任意波形发生器与超声平台外部触发功能相结合,通过脉冲触发采集方式采集二维超声图像集。通过BNC线将Trig in接口与任意波形发生器接口相连,使超声平台在探头扫描过程中同步接收已由探头运动控制模块设置好的触发脉冲(图2)。通过超声平台软件模块在MATLAB编程环境下编写二维超声实时扫描脚本,在平台序列控制结构(Seq-Control Structure)部分对触发功能进行定义(图4):令平台在接收到触发脉冲之前处于待机状态,当符合触发条件(5 V高电平,上升沿触发)的触发脉冲传输至平台时,每接收一个脉冲,采集一帧二维超声图像,直到探头运动至终点,得到二维超声图像集,最后通过平台存储功能将所采集的二维图像集保存为视频格式文件。

图4 图像数据采集过程基本原理Fig.4 Schematic illustration of pulse-triggered image data acquisition.
1.3 三维重建显示模块
二维图像集采集完成之后,通过三维重建显示模块构建三维图像。三维重建显示模块主要包括三维重建算法和三维图像的显示方法。本文运用的是基于体素的三维重建方法,获得待测物体三维层面的结构信息。重建过程主要分为以下两步:
1.3.1 三维重建 三维重建的目的是根据二维超声图像信息在感兴趣区域建立三维立方体,并确定其坐标原点以及X、Y、Z3个方向分辨率,通过坐标变换将二维图像像素映射至三维坐标系中。根据数据采集存储模块提供的二维图像集信息,包括图像集帧数、图像尺寸和像素间距等,确定重建后三维立方体的尺寸(包括最小坐标Xmin,Ymin,Zmin和最大坐标Xmax,Ymax,Zmax)以及X、Y方向分辨率,Z方向分辨率可由超声探头扫描移动过程中的采集精度σ确定。由于数据采集过程采用的是机械扫描采集方式,探头移动协同于触发脉冲的发射频率,因此所获得的图像在空间中等间隔平行排列,图像间隔即采集精度σ。基于所获取的三维信息和所建立的三维立方体,直接将二维图像集每一帧对应至三维立方体相应位置,便可快速获得三维数据(图5)。
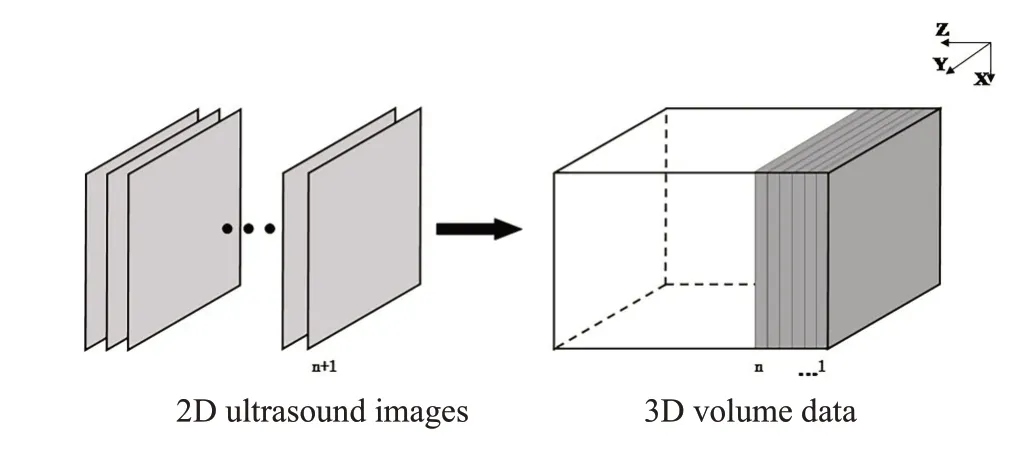
图5 三维重建过程示意图Fig.5 Schematic illustration of 3D reconstruction process.
1.3.2 三维图像显示 利用VTK图形可视化工具对三维数据进行渲染,形成三维立体视图,可任意旋转、平移与缩放,同时从三维立方体数据X、Y、Z3个方向分别提取二维信息得到横断面、矢状面和冠状面切面图(图6),结果显示在用户界面中。
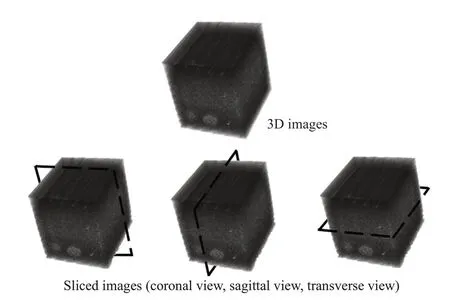
图6 系统可显示三维立体视图及任意位置的冠状面、矢状面、横断面图像Fig.6 Display functions of the system:3D image and slice view from three directions.
1.4 三维超声成像系统用户界面
为使该系统各部分能够由用户通过用户界面控制,本文编写了用户界面,由运动控制与波形设置界面和三维成像控制界面两个部分构成。
1.4.1 运动控制与波形设置界面 运动控制与波形设置界面(图7)基于C++环境在Microsoft Visual Studio 2010下编写。该界面的主要功能是控制探头的运动,可调节其移动速率、移动方向等参数,同时可记录探头的移动距离和位置;界面的另一项功能是“一键设置”触发脉冲,即通过点击界面上的"1初始化"按钮,在步进电机初始化的同时,任意波形发生器可计算出当前电机移动速率下的触发脉冲频率,并在探头开始正向移动的同时发射触发脉冲,以控制图像采集。
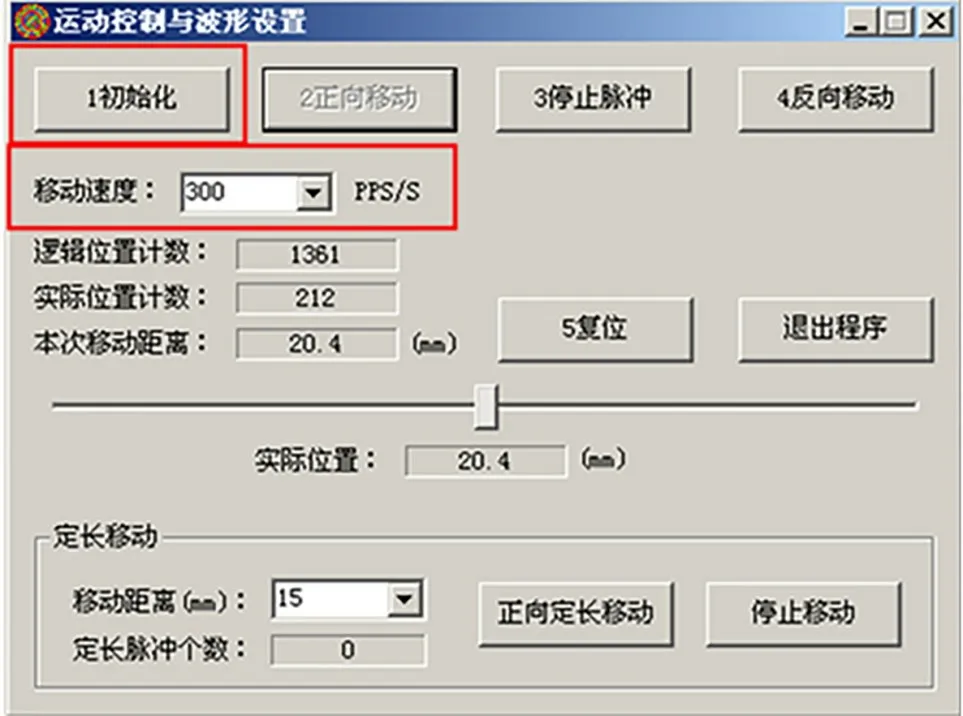
图7 运动控制与波形设置界面Fig.7 UI for motion control and pulse setting.
1.4.2 三维成像控制界面 三维成像控制界面基于MATLAB环境,编辑图形用户界面(GUI)将数据采集存储、三维重建与结果显示功能整合至超声平台的软件控制界面(VSX)下。界面主要用来方便用户控制超声平台的扫描参数与模式设置、图像采集开始与冻结存储以及最终的三维重建与结果显示。点击“3D Recon”按钮可完成三维重建工作,获得三维数据(图8)。通过“SlicePreset”菜单列表可完成三维数据的可视化和切片工作,分别得到三维立体视图和3个方向的切面图;最后通过“Slice Viewer”的3个切面显示按钮调出冠状面、矢状面、横断面3个方向的切面图(图9),3个切面的界面底部有滚动条可选择显示成像位置。根据图像扫描间距和二维图像的像素间距,可确定冠状面的帧间距约为0.10 mm,矢状面的帧间距约为0.11 mm,横断面的帧间距约为0.11 mm,以方便确定所要显示成像的位置。

图8 三维成像控制界面Fig.8 UI for 3D imaging control.
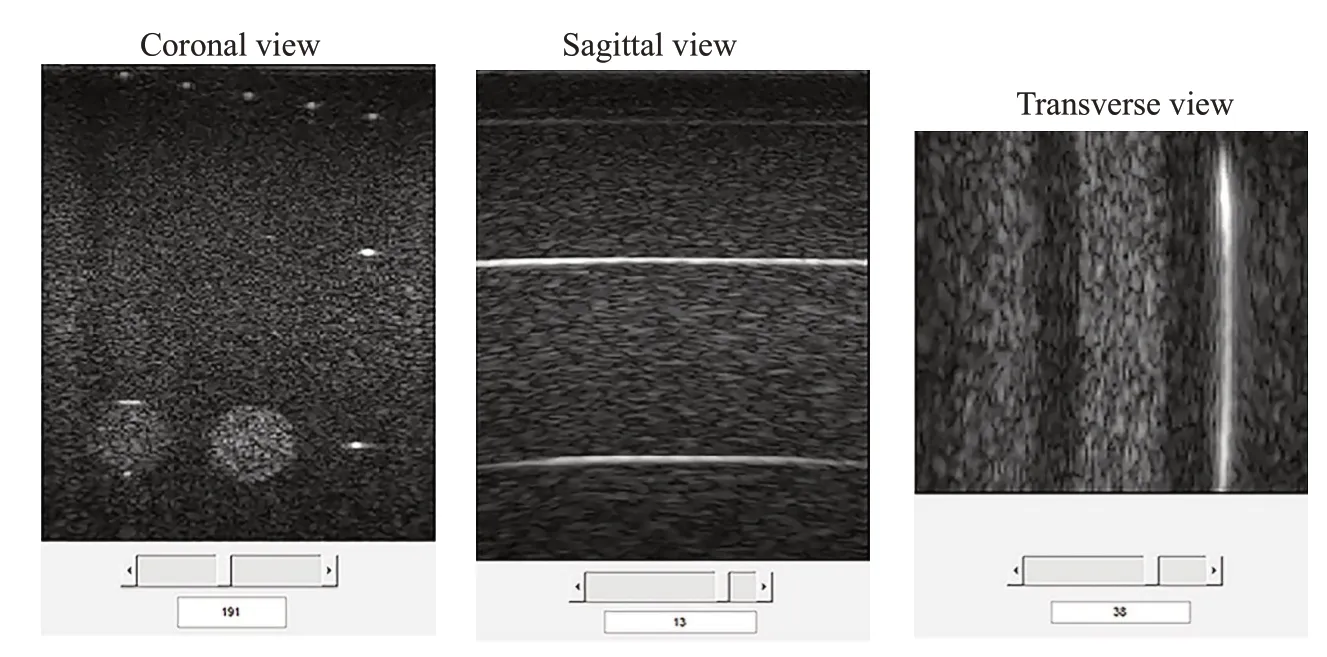
图9 三维切面图显示界面Fig.9 UI of 3D slices display.
1.5 三维超声成像系统功能验证实验
三维超声成像系统构建完成后,分别通过体模与人体颈动脉扫描实验验证三维重建的准确性并测试该系统的实用功能。由于颈动脉结构简单,便于扫查及观察系统成像结果,因此本实验中人为忽略其自身搏动引起的图像误差,仅作定性分析。
1.5.1 标准超声测试体模扫描实验 本文所述三维超声成像系统构建完成后,通过该系统对超声成像标准测试体模(054GS,CIRS,美国)进行扫描并重建其三维超声图像,显示重建结果,包括三维立体视图和3个切面图像。为了验证本系统三维重建的准确性,分别进行了不同角度的三维视图成像,并将3个标准切面重建后图像与原始二维图像靶点进行比较。
利用VTK图形可视化工具渲染可得到重建后的三维立体视图,并通过调整光线投射参数,控制图像内容的亮度、对比度、透明度等。
对重建所得的三维数据进行冠状面、矢状面、横断面3个标准切面切片,分别从原始图像选取两个靶点与切面图进行位置与图像直观效果比较。鉴于三维数据冠状面即为原始二维图像采集面,因此本文只比较了矢状面、横断面的重建效果。
1.5.2 人体颈动脉扫描实验 沿受试者颈动脉径向进行B型超声扫描,为了在一定程度上排除因受试者移动、实验人员操作等原因造成的人为因素,获取若干组扫描数据并保存为视频格式,选取扫描效果较好的一组数据。首先,利用基于超像素与邻域块特征结合的连续图割分割方法[29],从每一帧原始二维超声图像中提取出人体颈动脉信息,得到仅包含颈动脉部分的二维图像数据,然后进行三维重建,获得超声三维视图以及3个方向切面图。
2 结果
2.1 标准超声测试体模三维成像结果
四栏视图分别为从三维数据的正面、背面、底面和左侧面观察结果(图10)。三维视图直观地显示了三维数据各个角度的图像,能够直接准确地显示出体模内部结构的位置关系。
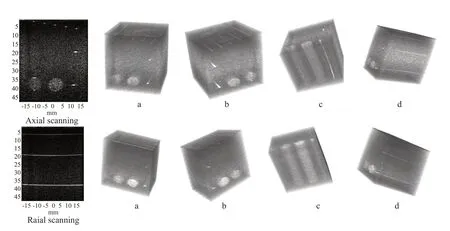
图10 重建后三维视图Fig.10 Reconstructed 3D images.a:Front View;b:Back View;c:Bottom View;d:Side View.
在原始二维图像横坐标-10 mm附近区域与10 mm附近区域选取2个靶位(图11A),分别与重建后矢状面进行位置比较,可见靶位1位于原始图像-11 mm左右,重建后位置同样位于-11 mm处,重建效果与原始图像接近;同理,靶位2处重建结果与原位置基本一致,重建效果接近。选取纵坐标5 mm附近区域与40 mm附近区域的靶位进行比较(图11B),同理可见重建后横断面位置与原始图像靶位位置基本一致,重建效果接近。
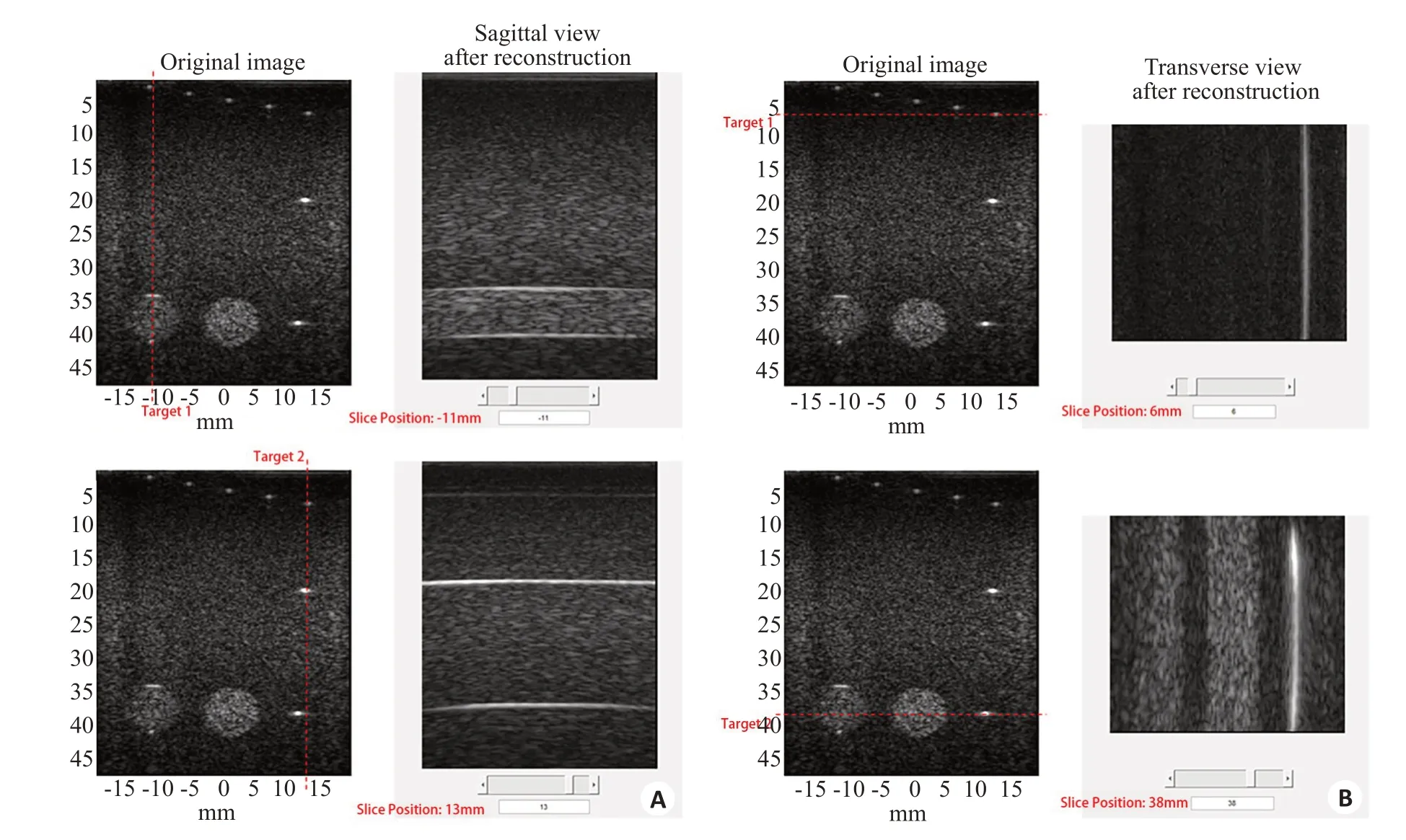
图11 重建后选取两个靶位对原始图像与切面图进行比较Fig.11 Comparisonof original and reconstructed images from two target sites.A:Sagittal plane;B:Transverse plane.
根据比较结果发现,通过该三维成像系统进行的三维重建较为准确,切面图各靶位的位置均能够较准确地对应原始图像中相应的靶位,重建效果与原图差异较小;但是由于扫描支架做工原因,探头在滑轨上移动时存在轻微的摆动,导致重建后的图像出现轻微弯曲、偏移等现象,同时操作者的细微动作也影响了重建质量,后续将对系统工作方式以及三维重建方法进行进一步优化以解决这一问题。
2.2 人体颈动脉三维成像结果
人体颈动脉如图12红框中所示,对该区域按照颈动脉上下边缘进行分割后,对分割结果进行三维重建,得到图12中四栏视图,分别显示了不同旋转角度下的颈动脉重建结果。

图12 人体颈动脉超声三维视图Fig.12 Reconstructed 3D images of human carotid artery.a:3D View;b:Front View;c:Bottom View;d:Side View.
对采集的二维原始超声图像进行三维重建得到三维立方体数据,并从3个标准切面方向进行切片,得到3个方向切面图(图13)。其中,冠状面为原始采集面,矢状面与横断面为重建后切面,如图中箭头所示为颈动脉重建结果,其中横断面重建受颈动脉自身搏动及探头扫描过程中的微弱位移影响,效果较矢状面重建效果差。人体颈动脉的三维超声成像结果能够直观地显示颈动脉在人体内的形态,3个方向的切面图较为准确地提供了颈动脉的相对位置以及多角度的二维图像信息。在后续研究工作中,将逐步在成像系统中加入对人体组织的相关参数测量功能,使其能够满足一定的临床应用需求。
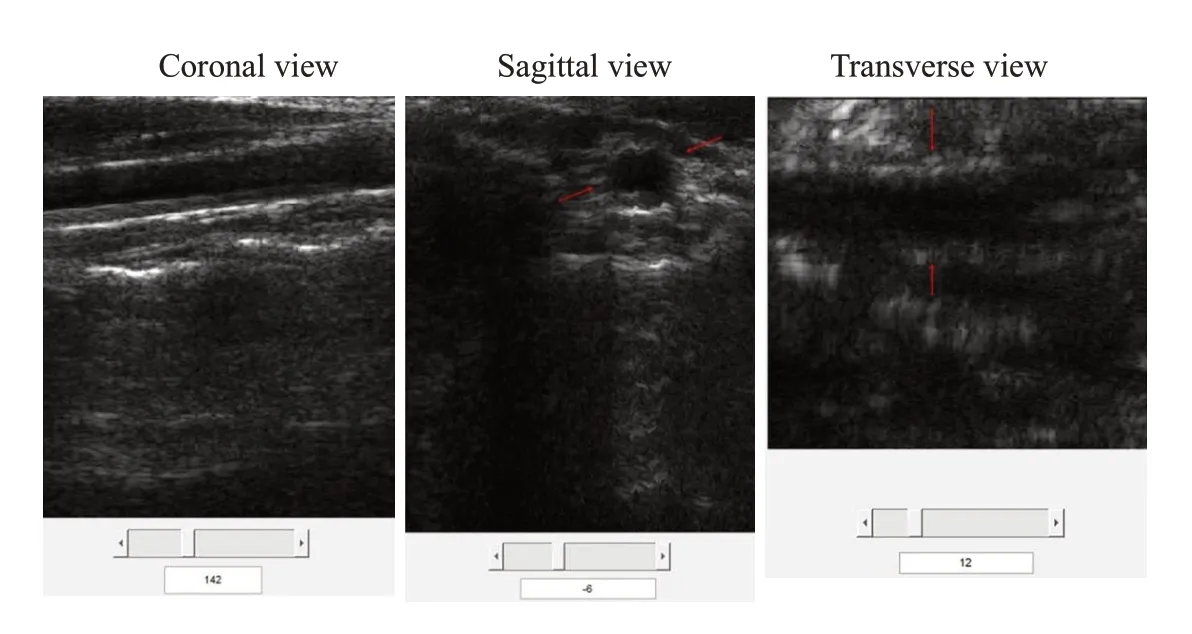
图13 人体颈动脉三维重建切面图Fig.13 Cross-sectional images of human carotid after 3D reconstruction.
3 讨论
本文提出了一种基于VerasonicsTMVantage128 开放式超声平台的触发采集式三维超声成像系统。该系统创新地利用了超声平台外部触发功能,通过步进电机与触发脉冲的同步来增加二维图像采集的精确性,实现了利用外部任意波形发生器发射触发脉冲控制Vantage128超声平台独特的触发功能,使探头扫描过程与图像采集过程精确协同。通过标准体模扫描实验实验,证明系统能够按照用户设定实现了步进电机带动超声探头进行机械扫描、图像采集和重建显示等功能,得到完整清晰的体模超声三维重建图像。图像结果不仅证实系统有着较高图像采集精度,而且验证了重建方法的可行性;人体颈动脉扫描实验表明该系统能够应用于对部分组织结构的临床三维超声成像中,并得到较为直观的三维视图及标准切面图像。总体而言,本研究为VerasonicsTMVantage128 开放式超声平台提供一种新的三维超声重建思路,即触发采集式三维超声成像,并基于该超声平台的超声三维系统完成了初步设计并实现了其功能,具有一定的临床实用意义,达到了研究的预期目的并为后续三维超声重建的应用与研究奠定了良好基础。
但本研究也存在可改进之处,其中最主要的在于系统的初步设计中,采用了单轴机械扫描,虽然这种方法简化了三维重建过程,对结构简单的组织重建效果较好,但是探头活动轨迹固定,无法按照操作者扫描需要进行任意方向扫描,特别是扫描复杂结构的组织,该系统的实用性不足。后续可通过多轴固定滑轨或采用自由三维机械臂扫描,来增加扫描方向进行改进。此外,由于该设计采用了匀速直线运动并配合触发脉冲采集图像数据,在系统中,计算机等硬件或软件存在延迟,导致三维重建过程中各部分也存在细微时间延迟,系统延迟叠加后在一定程度上影响了重建图像的准确性,尤其是与探头运动侧垂直的两个方向切面图易出现运动伪影,对于重建细致的解剖结构可能出现偏差。在后续工作中,可建立触发脉冲发射频率与探头运动之间精度匹配关系的数学模型,通过调节合适的关系参数,保证在不同采集精度需求下,系统不会过采样或欠采样,进而提高图像采集的位置准确性,抑制重建图像的伪影。也可通过采用更加鲁棒的三维重建算法进行插值,提高三维图像质量。最后,对三维数据的切面图目前只进行了3个方向的切面显示,缺少定量分析功能,对于不规则物体或内部结构相对复杂的组织器官,仅从这3个方向显示切面图像是信息不足的。后续研究工作将针对目前存在的问题,重点在三维重建图像质量、数据采集方式以及重建结果的定量分析等方面做出改进。
综上所述,本文提出的触发采集式三维超声成像系统实现了三维超声成像的基本功能,并且成功整合到了能够基于MATLAB开发的VerasonicsTMVantage128开放式超声平台中,为后续在该平台上进行的三维弹性成像、四维超声成像等相关基础应用研究奠定了良好的软、硬件基础。
