渐近的鲁棒分布式假设检验*
2021-06-15顾菊平牛顿标曹竹君宋恩彬
刘 颖,顾菊平,牛顿标,曹竹君,宋恩彬
(1. 四川大学数学学院,四川 成都 610065;2. 南通大学电气工程学院,江苏 南通 226019)
分布式系统包含多个传感器,每个传感器将各自的局部决策传给融合中心,融合中心再作出全局决策。相比于中心式系统,分布式系统有多个优点,例如降低通信带宽、提高计算效率、具有容错性以及可以使用不同的传感器技术。
大多数研究基于简单假设,即观测的先验信息是完全已知的,再使用贝叶斯准则或奈曼-皮尔逊准则,对每个传感器寻找最优的决策规则。然而在实际情况中,观测的统计信息一般是不完全已知的,此时仅已知某个名义分布。对于具体的观测模型,可能存在多个与名义分布相关的决策方案,但是当真实分布与名义分布存在微小差异时,系统性能急剧退化[1]。因此,系统具有鲁棒性是非常必要的。
在分布式传感器网络中,对于单个传感器的决策规则及融合中心的融合规则,有很多相关的资料。文献[2]将局部决策的门限固定,并优化了融合规则;文献[3-4]同时优化融合规则和局部决策;经典教材[5-7]整合了不同准则(贝叶斯、奈曼-皮尔逊、极小极大等)下的最优决策规则和融合规则及它们的迭代算法等结论。此外,也有很多针对鲁棒性的资料。文献[8]介绍了鲁棒的统计量;文献[9]在分布式系统中考虑2-交替Choquet容度[10]描述的不确定类,从而得到鲁棒的数据融合规则;文献[11]将有限集统计量应用于分布式融合问题:即融合由地理分隔的数据融合系统产生的输出,并提出最优和鲁棒两种不同的方法;文献[12]基于网络中的分布式平均一致性,提出了一种简单的分布式鲁棒迭代方法,以计算参数的极大似然估计。也有许多文献考虑带有渐近多传感器的分布式系统:文献[13]介绍了带有渐近多传感器的鲁棒分布式系统,利用渐近相对效率度量表明系统具有较好的性能;文献[14]考虑假设检验问题,当传感器数量趋于无穷时,会将传感器进行最优分组,每组所有传感器使用相同的决策规则来决定传输给融合中心的内容。
多传感器数据融合是一种新兴技术,例如:自动目标识别,战场监视以及自动驾驶汽车的制导和控制,复杂机械的监视,医疗诊断和智能建筑。多传感器数据融合的技术来自包括人工智能、模式识别、统计估计和其他领域在内的广泛领域[15]。文献[15]提供了有关数据融合的教程,介绍了数据融合的应用、过程模型以及适用技术的标识,评论了有关数据融合的最新技术。
本文考虑带有渐近多传感器的鲁棒分布式系统,每个传感器只收集一个观测,观测基于信号选择模型。这里的渐近多指的是传感器的数目是一个接近正无穷的整数,并且本文考虑的是同构传感器网络,即所有传感器节点类型相同,都对目标进行观测,并对观测进行进一步处理。文献[13]研究了确定性信号,且两个假设为高斯ε-污染类,其名义分布均值不同方差相同,最后给出了一个线性的鲁棒检测函数。本文也研究确定性信号,但名义分布方差不同,由此推导出每个传感器如何作决策(利用平方鲁棒检测函数),并通过渐近相对效率度量分布式传感器系统的渐近性能。
1 预备工作
考虑先验信息不完全已知的分布式假设检验问题:

(1)
其中,F0,F1表示密度函数类,f0,f1分别是F0,F1中的密度函数。基于观测数据判断观测来自f0还是f1。分布式系统包含渐近多传感器,每个传感器只收集一个观测。假设观测满足信号选择模型

(2)
其中,S0,S1是信号,W0,W1是高斯白噪声。基于该模型可以考虑多个有意义的问题,例如,信号选择中的散度和Bhattacharyya距离测度[16],通信和雷达系统中的信号选择[17],部分相关的二进制通信的最佳检测和信号选择[18]。当H0中信号不存在时,该模型化为信号检测模型:
基于该模型也有许多研究,例如:考虑稀疏信号的检验问题,即在一定条件下通过少量观测来精确重建稀疏信号[19];低信噪比环境中检测信号存在与否[20];柯西噪声下的相关性检测[21]。本文考虑确定性信号的情形。
传感器网络有N个传感器和一个融合中心。分布式系统中,传感器配置鲁棒的检测函数作出局部决策传给融合中心,最终对不同信号作出决策。中心式系统的融合中心配置相应的检测函数。利用渐近相对效率研究鲁棒分布式系统的渐近性能。渐近相对效率指分布式系统与中心式系统要达到相同的性能水平,即相同误警率和功效
α=P(H1|H0)
β=P(H1|H1)
所需要的传感器数目之比。


(3)
∀f1∈F1,∀δ(n)
以及
P(δ*(n),f0)≤α,∀f0∈F0
(4)

特别地,考虑似然比检验。决策规则δ*(n)对应的检测函数为

(5)
(6)
考虑ε-污染类
Fk={fk:fk=(1-εk)gk+εkhk;hk∈H},k=0,1
(7)
作为密度函数类。其中g0,g1是已知的名义密度,ε0,ε1是介于(0,1)之间的污染常数,H是所有密度函数组成的集合。本文考虑高斯密度函数类。
相应的最不利对数似然比为[22]

(8)
当ε0<0.5,ε1<0.5时,截断常数c0,c1被唯一确定[23]。由于每个传感器只收集一个观测,则式(5)中n=1,于是每个传感器都配置鲁棒的检测函数(8)。当出现异常值的时候,该检测函数能够避免系统出现性能故障。
引理1[13]式(8)中的最不利密度也是KL散度意义下的最不利密度。
假设信号是确定性信号,此时各传感器观测独立同分布。假设某时刻观测到H0,H1下的信号分别为s0,s1,则传感器获得的最终观测为

(9)
1.1 线性鲁棒检测函数
假设F0的名义密度为g0(x)=σ-1φ(x/σ),其中φ(x)是均值为0方差为1的标准正态分布的密度函数。F1中的名义密度是F0通过参数变动所得,即对于g0(x)∈F0有g1(x)=g0(x-θ)∈F1,θ为给定常数,则F1的名义密度为
g1(x)=σ-1φ((x-θ)/σ)
即名义密度对应的分布函数均值不同方差相同。通过一系列假设可得检测函数[13]

(10)
常数b满足b>0。该检测函数将绝对值过大的异常值截断。
1.2 平方鲁棒检测函数


f1(x)=σ-1f0((x-θ)/σ)=
(1-ε0)σ-1g0((x-θ)/σ)+ε0σ-1h0((x-θ)/σ)=
(1-ε0)g1(x)+ε0σ-1h0((x-θ)/σ)∈F1
此时名义密度的比值为

(11)
注意到污染常数ε0=ε1,于是
(12)
式(12)第二个式子整理可得
令
相应二次函数的对称轴为
(13)
则第二个式子化为
(14)
进一步化简

(15)
将不等式(15)右边的式子记为c2,c≥0,同理可得

(16)
将不等式(16)右边的式子记为d2,d≥0,于是有
将logc0,logc1代入式(12)可得
(17)

(18)

(19)
在后面的定理和仿真中,鲁棒的检测函数(19)表现出好的性能,则说明c=1/d假设对原检测函数(18)不会产生本质影响。因此假设c=1/d是合理的。记
(20)
2 确定性信号下的平方鲁棒分布式系统
考虑带有渐近多传感器的分布式系统,每个传感器只收集一个观测,观测服从信号选择模型(2)。假设第j个传感器的局部决策为

(21)
当传感器的数量较大时,所有传感器使用相同的决策门限,融合中心作决策不损失融合规则的最优性[24]。于是λ1=λ2=…=λN=λ是一个合理的假设。那么第j个传感器的局部决策化为
(22)
假设每个传感器配置了鲁棒的检测函数(19)。令传感器数目趋于∞,利用渐近相对效率研究检测函数(19)的性能。渐近相对效率指分布式系统与中心式系统要达到相同的性能水平,即相同误警率和功效,所需要的传感器数目之比。相关结果在下面的定理1中。
定理1 考虑带有渐近多传感器的分布式系统。每个传感器只收集一个观测。观测基于模型(2),其中信号是确定性信号,观测满足式(9),服从分布

(23)
其中,
m0=m(θ0,σ0),m1=m(θ1,σ1)

其中1/d<λ≤d,d>1,λ2是每个传感器的决策门限。定理1将λ看成未知常数,下一节仿真会进一步分析,因此定理1的渐近相对效率ARE(∞,zd,G)仅是截断常数d的函数。
证明:
1)证明中会用到以下几个式子

(24)

(25)

(26)
分布式系统和中心式系统要满足的误警率α和功效β是给定的。
2)先考虑中心式结构。融合中心的决策为

(27)
zd(xi)独立同分布,满足中心极限定理的条件,于是

(28)
其中,
m0=m(θ0,σ0),m1=m(θ1,σ1)
[σy(y2+3σ2)+4θσ(y2+2σ2)+
[σy(y2+3σ2)+4θσ(y2+2σ2)+
根据误警率α可以得到中心式结构融合中心的门限λ(N),将其代入功效β的表达式可得所需的传感器数目N。

(29)

(30)
其中Φ-1(x)=y意味着x=Φ(y)。
3)接下来讨论分布式系统。传感器数目M趋于∞,每个传感器只收集一个观测,局部决策为式(22)
定义每个传感器的误警率和功效为
pλ,kP[zd(x)≥λ2|Hk]=
(31)
k=0,1。选择1/d2<λ2≤d2,d>1,于是有
pλ,0=P[zd(x)≥λ2|H0]=

(32)

(33)
该定理将每个传感器的决策门限λ2看成未知常数,下一节仿真会进一步分析。
融合中心的决策为
(34)
其中uj是第j个传感器的局部决策,j=1,…,M。当M→∞时,uj独立同分布,满足中心极限定理的条件,于是
(35)
其中,
skE{uj|Hk}=pλ,k,
根据误警率α可以得到中心式结构融合中心的门限μ(M),将其代入功效β的表达式可得所需的传感器数目M。
μ(M):α=P(v(M)=1|H0)=
(36)
M:β=P(v(M)=1|H1)=
(37)
4)用式(37)除以式(30)可得式(23)。
注释1 分布式系统将传感器的决策门限λ2看成未知常数。为了得到分布式系统真实的传感器数目,下一节仿真将给出λ的近似值,进一步分析渐近相对效率。结果显示在分布式系统中配置鲁棒的检测函数会提高系统性能。
3 仿真分析
分布式系统包含渐近多传感器,每个传感器只收集一个观测,并配置鲁棒的检测函数zd(x)作出局部决策。观测基于模型(2),其中信号是确定性信号,观测满足式(9),服从分布


图1 中心式传感器数目随截断常数的变化
分布式系统传感器数目与局部决策门限λ2相关。要得到分布式系统所需要的最小传感器数目,应该对λ取下确界。接下来通过图像给出λ以及传感器数目的近似值。
由定理1的证明可知,λ属于区间(1/d,d],d>1,现在给出传感器数目随λ变化的图像,如图2所示。

图2 分布式传感器数目随传感器门限的变化
由图2可知,图像在1.6左右取最小值。因此λ=1.6对应的函数值,向上取整为154,可以近似最小的传感器数目。已知λ属于区间(1/d,d],因此,截断常数d应该满足d≥1.6。接下来给出ARE随截断常数d的变化图像,如图3所示。
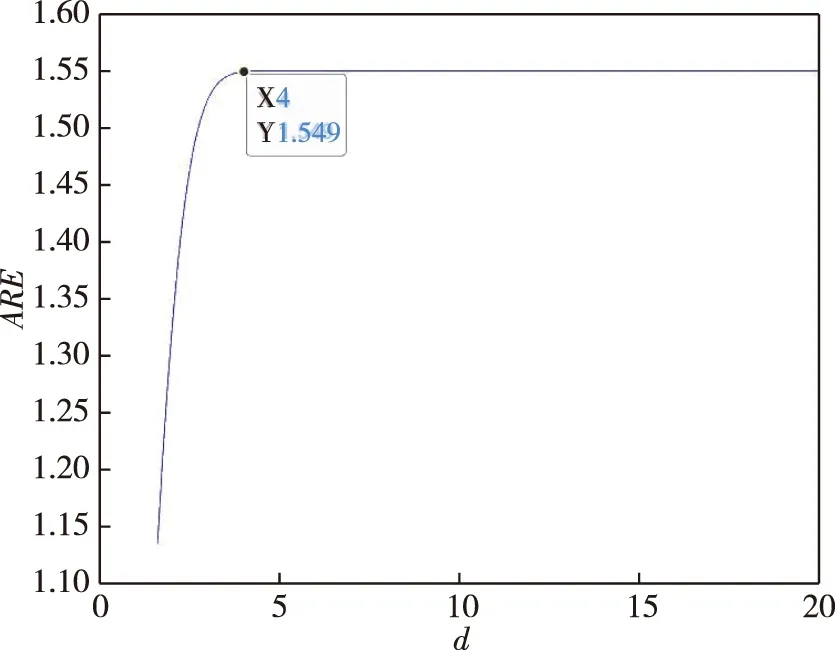
图3 ARE随截断常数的变化
由图3可知,截断常数越接近1.6,分布式系统所需的传感器数目越接近中心式;截断常数d>4时,分布式系统的传感器数目和中心式比值稳定在1.549左右;截断常数d渐近大时,截断基本被消除,此时鲁棒检测函数和一般的似然比检测函数等价。
相比于一般的似然比检测函数,传感器配置鲁棒检测函数时,随着截断常数d减小,即系统的鲁棒性越高,中心式系统需要更多的观测才能达到给定的性能水平,而分布式系统基本上不受影响。这个特性说明在分布式系统中配置鲁棒的检测函数是必要的。
注释2 本文分布式网络中所有传感器仅仅基于某一时刻对信号的观测而作出决策。从仿真中可看出鲁棒的分布式网络具有良好的性能。在实际应用中,基于有限数量的传感器连续观测获得的数据,使用同样的决策规则也能实现好的性能,因为此时同一个传感器不同时刻的观测、不同传感器的观测均是独立同分布的,证明方法完全同定理1。
4 结束语
本文研究了包含渐近多传感器的分布式假设检验问题,所有传感器都配置鲁棒的检测函数。考虑的两个假设是高斯密度函数类,特别强调ε-污染类。根据渐近相对效率以及系统对异常值的抵抗能力描述了鲁棒检测函数的优点。今后将进一步考虑随机信号观测的情形。
