一种新的弹道导弹机动突防策略研究
2021-06-15谢如恒
谢如恒,丁 洋,杨 毅
(中国电子科技集团第二十八研究所,江苏 南京 210001)
近年来,随着全球军事强国导弹防御系统的日趋成熟,战略核力量面临的巨大挑战就是大气层外中段防御系统,为有效躲避敌方反导防御系统中外大气层杀伤拦截器(Exoatmospheric Kill Vehicle,EKV)的拦截[1-3],弹道导弹中段机动变轨技术已成为重点研究方向。
美国国家导弹防御系统的核心技术主要体现在外大气层杀伤拦截器(EKV)上。外大气层杀伤拦截器是一种小型、非核、自寻的、靠直接碰撞杀伤的拦截器,它还装有红外导引头、变轨推进系统以及数据处理制导系统[4-6]。美国多年来通过拦截试验对EKV进行了多次改进和完善,2020年在太平洋发射的拦截器成功拦截洲际弹道导弹,使其具备实战应用的能力,因此研究分析外大气层杀伤拦截器的作战特点和突防措施,具有一定的现实意义。
目前的弹道导弹中段突防措施,主要分为以下两个方面。
第一种是程序式机动突防[7-8],所谓机动突防,就是事先设定好弹道导弹的机动程序,即不管敌方是否拦截,如何拦截,弹道导弹都会在发射后的固定时间,进行固定的机动,以此来降低拦截器对弹道导弹轨迹的预测精度,提高弹道导弹的突防成功率。
第二种是自主机动突防[9-13],突防弹道导弹在探测到拦截器时,通过获取拦截器的飞行参数,由弹载计算模块实时计算突防机动指令进行突防机动[13-17]。这种机动突防方式具有主动智能化的特点,能够针对不同的拦截方式给出最优的突防策略,大大提高突防的成功率。但是由于整个突防过程时间短,对弹道导弹探测模块、计算模块以及发动机要求较高,所以具备自主机动突防能力的弹道导弹非常少。
本文基于最优控制和弹道导弹与拦截器在俯仰平面的对抗模型,构建了一种新的机动突防策略,并用Matlab仿真验证了机动突防策略的正确性。
1 俯仰平面对抗模型建立
本文构建弹道导弹和拦截器在俯仰平面的攻防对抗模型,如图1所示。
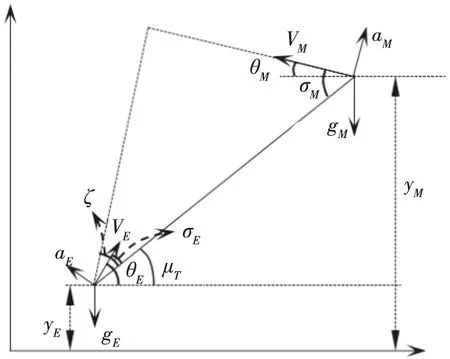
图1 俯仰平面攻防对抗示意图
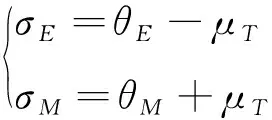
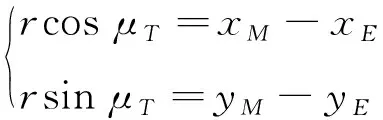
图1中,aE表示拦截器机动加速度,垂直于速度方向,左侧为正,右侧为负;θE表示拦截器的弹道倾角,以x轴正方向起始,逆时针为正,顺时针为负;σE表示拦截器的前置角,弹体x轴与弹目视线之间的夹角,向左为正,向右为负;VE表示拦截器的飞行速度;gE表示拦截器的重力加速度;aM表示弹道导弹的机动加速度,垂直于速度方向,右侧为正,左侧为负;θM表示弹道导弹的弹道倾角,以x轴负方向起始,顺时针为正,逆时针为负;σM表示弹道导弹的前置角,弹体x轴与弹目视线之间的夹角,向右为正,向左为负;VM表示弹道导弹的飞行速度,gM表示弹道导弹的重力加速度;r表示拦截器与弹道导弹的距离;μT表示拦截器相对于弹道导弹的弹目视线高低角,以x轴正方向起始,逆时针为正,顺时针为负。
拦截器动力学方程建立如下:
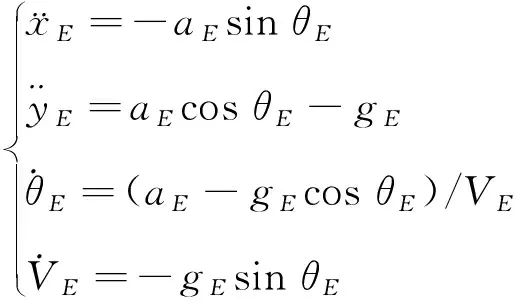
(1)
弹道导弹的动力学方程如下:
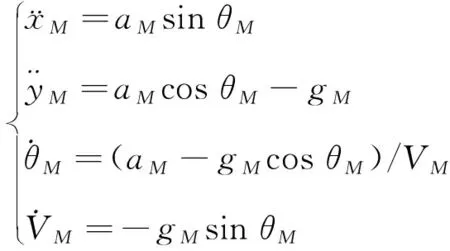
(2)
拦截器与弹道导弹相对距离r和接近速度VXD计算如下:
(3)
VXD=VEcosσE+VMcosσM
(4)
攻防对抗的时间tf采用下式进行估计计算:
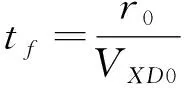
(5)
式中,r0表示攻防对抗初始时刻的相对距离,VXD0表示攻防对抗初始时刻的接近速度。
剩余飞行时间计算如下:
tgo=tf-t
(6)
拦截器和弹道导弹的前置角、弹道倾角和弹目视线角的关系如下:
(7)
弹目视线高低角计算如下:
(8)
2 模型的求解
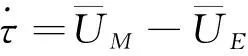
定义航向误差τ如下:
(9)
令
则式(9)变为
τ=VMsinσM-VEsinσE=VE(sinζ-sinσE)
(10)
航向误差τ表示垂直于弹目视线方向上双方的速度之差;τtgo表示在没有控制输入情况下,垂直弹目视线方向上的瞬时脱靶量。
弹目视线角速度可表示如下:
(11)
对τ求导数可以得到:
(12)

(13)
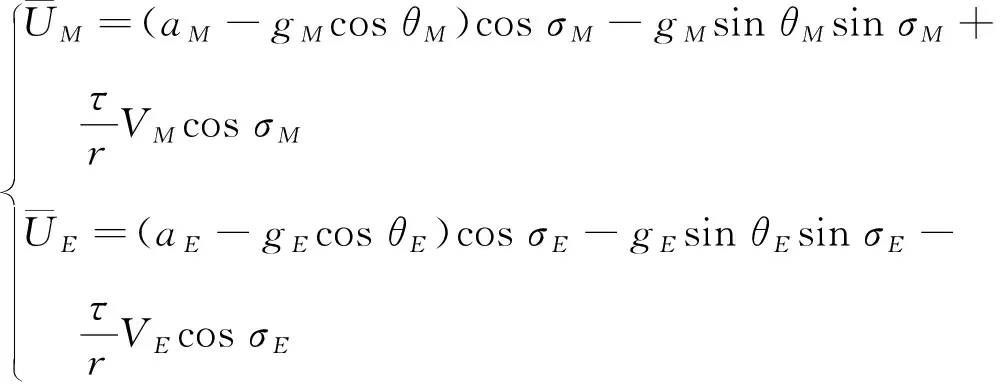
式(13)中的aM和aE分别表示弹道导弹和拦截器的机动加速度。由于
μT=θE-σE=σM-θM
(14)

(15)
则
(16)
选取系统的性能指标为
J=|τ|
(17)
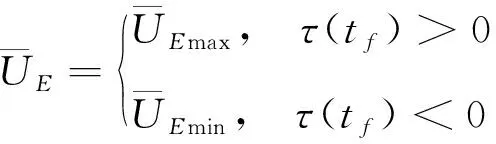
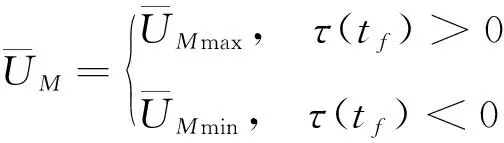
弹道导弹采取策略使得J尽可能大以便成功突防,而动能拦截器则相反,采取策略使得J尽可能小以便成功拦截弹道导弹。
(18)
(19)

(20)

(21)

(22)
(23)
其中,aEmax表示动能拦截器的最大指令加速度;aMmax表示弹道导弹的最大指令加速度。
可令

(24)

(25)

(26)

(27)
结合式(12)、(24)、(25),假设动能拦截器和弹道导弹的机动加速度分别为零,可得
aE=aM=0
(28)
所以


(29)
对上式进一步化简可得


(30)
将上述微分方程对时间t进行积分可得
τ=-C1eln(tf-t)
(31)
式中,C1为常数,且C1不为零;从上式可以看出τ的符号取决于C1,且C1为常数,所以
sgn(τ(tf))=sgn(τ(t))
(32)
因此式(26)和(27)变为:

(33)

(34)
从上式中可以看出,最终弹道导弹和拦截器的攻防对抗结果只和各自的机动能力和探测范围有关,机动能力表示导弹的最大机动加速度和机动时长,探测范围则决定了导弹的机动时机。
3 仿真分析
3.1 弹道导弹不机动
首先在弹道导弹不进行机动的情况下进行突防仿真验证,因为拦截器的拦截速度很大,在机动加速度限制在4g时,无法使飞行弹道快速改变,所以必然要求具有一定的前置角才能成功拦截弹道导弹。表1给出了攻防对抗最终脱靶量和拦截器初始前置角的关系。
从表1和图2中的仿真结果可以看出,弹道导弹在无机动情况下的突防效果与拦截器攻防对抗初始时刻的初始前置角有很大关系。只有当拦截器攻防对抗初始时刻的初始前置角在一定的范围之内时才可成功拦截弹道导弹;当拦截器的初始前置角满足3°≤ψM0≤13°情况下才可成功拦截弹道导弹,称该前置角范围为拦截器的最佳拦截窗口。
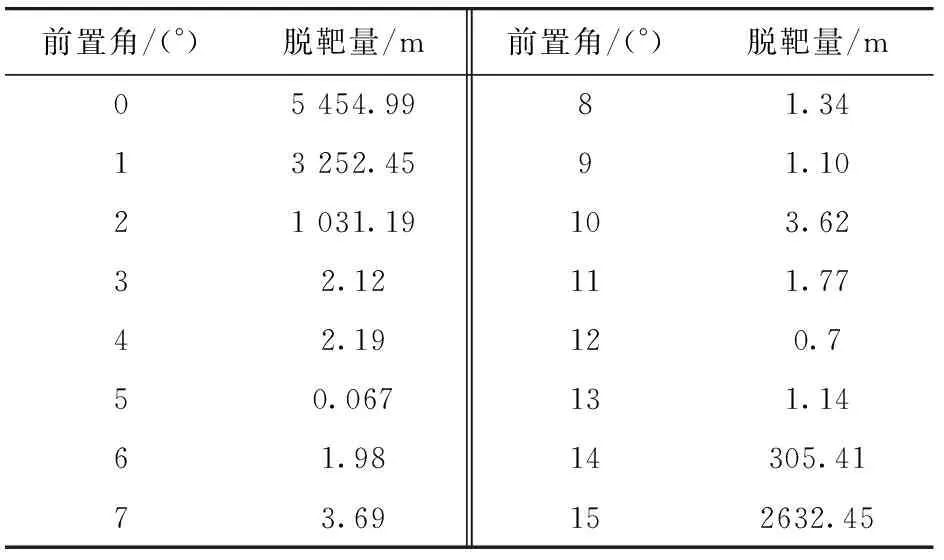
表1 拦截器初始前置角对突防效果影响关系表
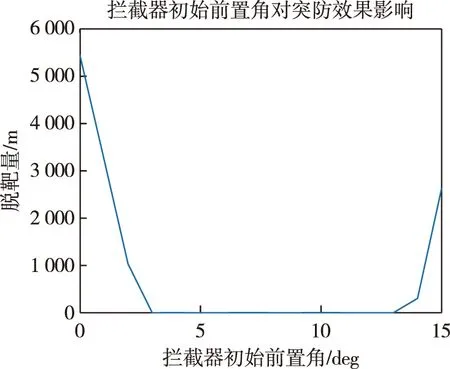
图2 拦截器初始前置角对突防效果影响关系图
3.2 弹道导弹机动
本节在弹道导弹机动的情况下,仿真分析弹道导弹在不同机动加速度、不同机动时机以及不同机动时长情况下的最终脱靶量,分析弹道导弹在何种情况下能够成功突防。设置拦截器的初始前置角为8°,弹道导弹最大机动加速度分别为2g、3g、4g,最大机动时长7.25 s,最远探测距离100 km,不同情况下的突防效果结果如图3和表2所示。
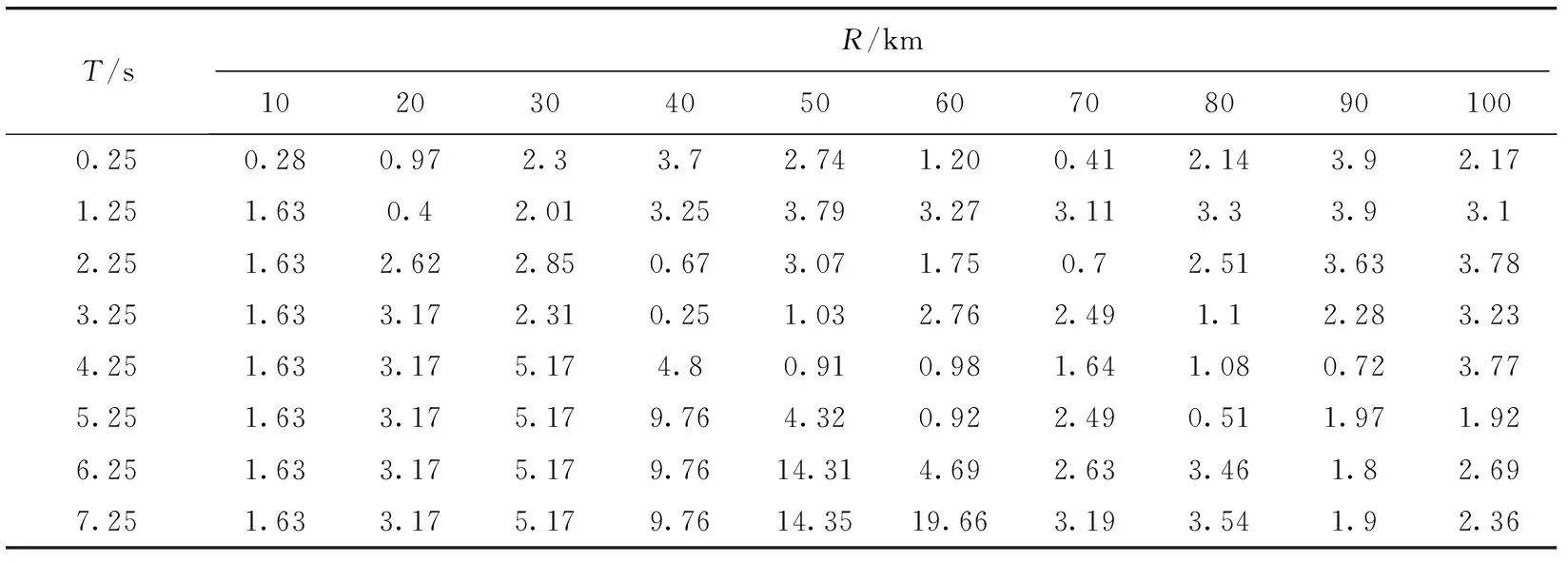
表2 弹道导弹最大机动加速度为2g下突防结果
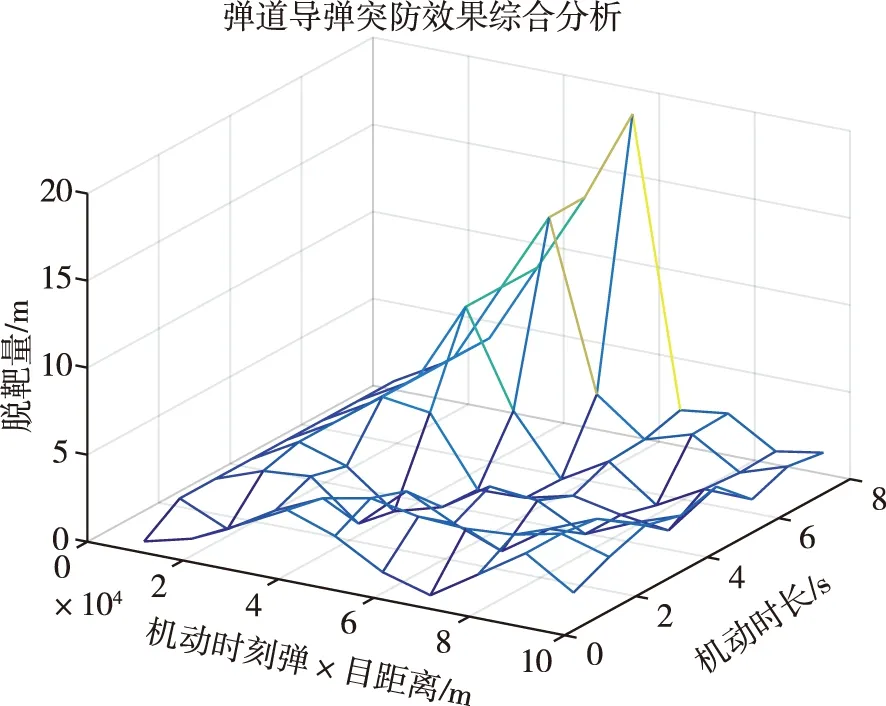
图3 弹道导弹最大机动加速度为2g情况下突防结果
由仿真结果可知,在弹道导弹机动加速度为2g的情况下,弹道导弹至少需要机动6.25 s,机动时机弹目距离在50 km左右才可以成功突防,而且此时的脱靶量还不到20 m,其余情况均被拦截器成功拦截。
相比于最大机动加速度为2g的突防结果,最大加速度为3g的突防成功率大大提升,最短机动3.25 s便可以成功突防,此时机动时刻弹目距离为30 km。由表3可知,最大机动加速度的提升能够有效提高弹道导弹的突防成功率。

表3 弹道导弹加速度为3g情况下突防结果
从表4中可以看出在弹道导弹最大机动加速度为4g情况下最少只需机动2.25 s左右即可成功突防,此时机动时刻弹目距离在20 km左右。在机动时长固定时,机动时机选择很重要,过早和过晚均会被拦截器拦截,过早机动,由于机动时长一定,使得拦截器有足够的时间进行机动拦截;过晚机动,弹道导弹来不及改变飞行状态而被成功拦截。定义机动时长一定情况下,能够成功规避拦截器拦截的机动时刻弹目距离为最佳逃逸窗口。从图5中可以看出,在机动时长一定的情况下,最佳逃逸窗口中存在峰值,并定义该峰值为最佳逃逸时机,从图中可以看出,最佳逃逸时机随着机动时长增加向右偏移,即机动时长越长,机动时机就越早。
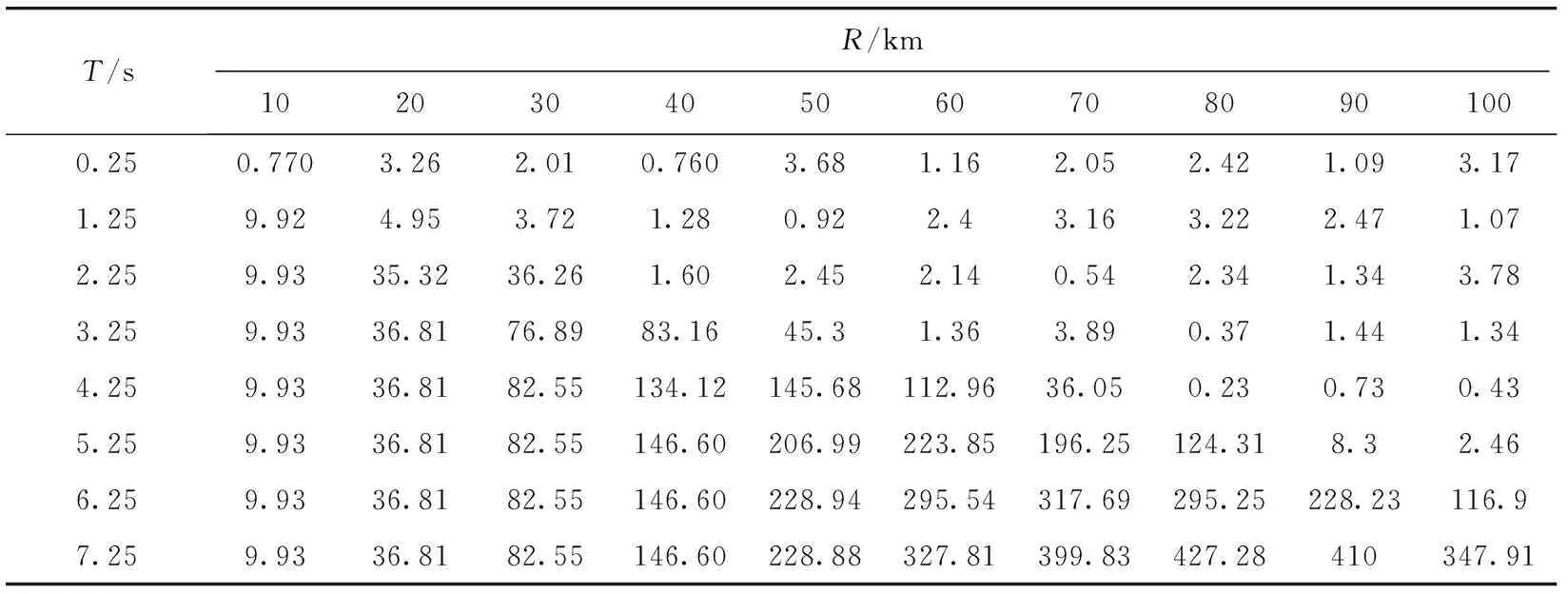
表4 弹道导弹加速度为4g情况下突防结果
图5 弹道导弹加速度为4g情况下突防结果
4 结束语
本文构建了弹道导弹和拦截器在俯仰平面的攻防对抗,并以航向误差τ作为攻防对抗双方性能指标。拦截器欲使航向误差最小以成功拦截弹道导弹;而弹道导弹欲使航向误差最大以躲避拦截器的拦截。基于此对上述攻防对抗模型进行求解,获取双方在二维平面内的最优机动策略。并在Matlab仿真环境下仿真分析了拦截器初始前置角、弹道导弹机动能力、可机动时间和机动时机对突防效果的影响,结合仿真分析总结如下结论。
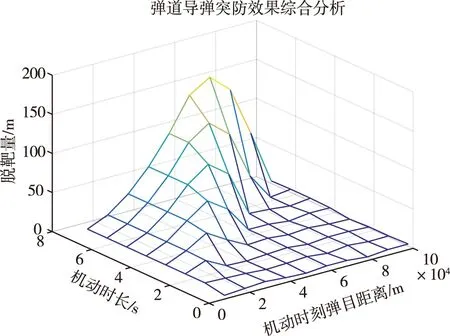
图4 弹道导弹加速度为3g情况下突防结果
1)拦截器对弹道导弹的拦截存在最佳拦截窗口,只有拦截器初始前置角位于最佳拦截窗口内才能成功拦截弹道导弹。
2)弹道导弹在机动时长和机动加速度一定时突防存在最佳逃逸窗口和最佳逃逸时机,在最佳逃逸窗口中突防成功率较大,机动时长越长,最佳逃逸时机越早。
3)弹道导弹的机动能力越强,越有利于成功规避拦截器的拦截。
4)在弹道导弹机动能力和机动时长一定时,并非越早机动越好,也非越晚机动越好,选择合适的机动时机仍有可能成功规避拦截器的拦截。越早机动,机动时长一定,拦截器有足够的时间进行机动拦截;越晚机动,由于速度太大无法迅速改变飞行轨迹而被拦截成功。
5)基于本文设计的突防机动策略,弹道导弹在某些情况下只需机动2.25 s便可成功突破拦截器的拦截,为突防后的弹道回归预留了足够的时间。
上述仿真结果验证了本文机动突防策略的正确性和可行性,为发展弹道导弹中段自主机动突防提供理论参考。
