港口堆取料机自动控制系统设计分析
2021-06-11苏青
苏青

[摘 要]堆取料设备在港口装卸作业领域中有着广泛的应用,同时也是不可缺少的重要设备之一,目前大部分港口在堆取料作业过程中依然使用半自动控制方法以及人工控制方法,这些已有的控制方法存在准确率不足和工作效率低等问题,因此需要在控制方法上进行创新,逐渐提升系统操作的准确性。本文在研究的开始阶段对港口堆取料机组成机理、功能进行了介绍,之后对自动控制系统设备进行了深入分析,在综合实际需求的情况下提出了新的观点,希望可以通过这种方式确保港口堆取料设备操作质量和效率。
[关键词]堆料设备;自动控制系统;系统设计方案
[中图分类号]TM76 [文献标志码]A [文章编号]2095–6487(2021)01–00–02
Design Analysis of Automatic Control System for Port Stacker
Su Qing
[Abstract]Stacking equipment is widely used in the field of port loading and unloading, and it is also one of the indispensable important equipment. At present, most ports still use semi-automatic control methods and manual control methods in the process of stacking. This paper introduces the mechanism and function of the port stacker at the beginning of the research, and then analyzes the equipment of the automatic control system in depth.
[Keywords]Stacking equipment; Automatic control system; System design
1 港口堆取料機自动控制系统的构成和功能简介
在港口堆取料自动化操作系统中包含了2个主要部分,分别为堆取料本地操作系统和远程操作系统。在本地操作系统中主要涵盖了扫描成像程序、定位程序、本地PLC、预防碰撞系统、预防载量过大系统等,本地操作系统在功能上正在逐渐优化和创新,目前可实现物料堆定位、现场动态监控、操作安全避让以及现场设备自动控制等,在程序中还安装了激光扫描设备以及悬挂手臂,短时内就能完成物料对的三维激光扫描,本地操作系统在实现远程操作的初始阶段,需要将以太网最为纽带,达到数据实时交换的效果,信息方面具有交互性。应用远程操作系统时,一定要重视操作系统的管理、现场物料堆放管理,使用自动化客户端对物料堆进行仿真计算,系统中拥有独立的中央控制系统,可以根据准确的时间节点下发堆放和取料指令,整个操作过程都能实现准确记录,反馈物料堆放位置和具体操作情况,系统应用中要重视防碰撞系统操作,不能出现物料碰撞和超载等情况,工作人员只有在收到终端授权指令之后才能进行操作,使用远程操作系统也能实现人工操作干预[1]。
2 三维操作系统设计
2.1 三维成像系统操作原理
在三维成像系统中汇集了数据处理模块、图像生成模块以及数据采集模块等,激光扫描装置可以精准测量物料轮廓,完成距离和角度等方面的扫描,形成良好的三维坐标信息点。三维成像系统中主要使用数据处理模块完成地理信息、信息反馈、机构信息等方面的分析,对于三维坐标数据也能进行有效干预,确保空间坐标转化的合理性以及规范性,之后采用良好的计算机算法完成过滤处理,保证拥有良好的数差值,最后将数据存储到数据库中。应用三维读取数据库可以对图片进行渲染,保证图片绘制和拼接的合理性,最终还能构成精度与模型都符合标准的堆料[2]。
2.2 三维成像系统的设计
在激光扫描设备的初始点T出发,对物料表面B进行测量,之后按照各点要点建立良好的三维坐标系,设坐标系原点为(0,0,0),初始点T和地面之间的高度为H,(0,0,H),激光束和ZX表面之间的夹角是0,与XY表面之间形成的夹角是α。激光初始点距离表面测量点的距离是L,在这种情况下B点坐标是(a,b,c)。在应用扫描设备过程中,使用悬臂对大量数据点进行采集,为三维坐标系建成提供数据基础,确保可以满足物料堆取作业需求,对于设备采集到的原始坐标进行采集,将其逐渐变成原始参考坐标系。使用定位操作系统可以控制扫描工程进度,得出回转机构的实时定位以及瞬间位置,保证原始测量点和位置数据的精准性,最后实现初始坐标数据的有效转换。由于测量点的数据相对较大,密度也相对较高,使用激光扫描装置时工作任务量很大,所以不能使用直接采集的方法,要不然会占用大量的计算机资源,数据过大、老数据出现丢失的概率更高。为了逐渐优化计算环境,提升计算效率,需要在初始阶段考虑仿真资源以及数据处理资源,之后还要对原始数据点进行规范处理。在表现矩阵的过程中通常使用散点的方法,使用二维数据的格式对其进行存储,初始坐标系和数组元素相对应。在成功获取测试点云数据之后,需要使用信息操作系统完成三维渲染,之后在上位机中显示出实时数据,模型建立时间需要在200 ms以内,仿真精度也需要低于0.2 m[3]。
3 自动控制系统设计
3.1 调速系统设计
为了达到理想的系统设计目标,需要在堆料堆放和存取开始阶段完成多个作业结构的精准定位,完成作业机构的准确控制,从而设计出良好的变频减速控制系统。调速系统设计的重点在于采样周期的确定,对于电机转速也需要进行合理控制,保证控制方案的合理性。在系统采样过程中可以将周期设定为T,使用PLC系统分析不同阶段的采样和反馈系统,通过确定脉冲次数确定实时转速。将固定扫描周期内部的编制程序码存储到寄存器中,每次在达到理想采样目标的情况下,将存放数据连接到寄存器中,同时还要将D1和D2中的数据进行清零处理,使用检查扫描周期和变化规律的方法确定不同的采样点。程序在日常运转过程中,MI00保持ON状态的情况下,D43具有的存放值是0,在这种状态下扫描周期达到要求之后会将T0传递到B33中,之后的扫描数据会存放在D34中,在T1大于T0的情况下,M110会保持良好的ON状态,此阶段无法执行停止命令,程序会时刻保持稳定运行状态。
在闭环控制过程中使用了P1算法,在系统中输入信号,使用控制设备将其传输到D/A通道中,之后使用变频设备与电机之间进行连接,系统数据信号在经过编译设备之后反馈给PLC控制设备,从而完成良好的闭环控制。通过良好的闭环系统可以逐渐提升设备定位精度,增加作业结构的效率与精准度,提升速度,让堆料过程和取料过程之间也保持着相同的移动距离,确保堆料形状和规格满足操作要求,高度也需要和实际设计具有一致性。
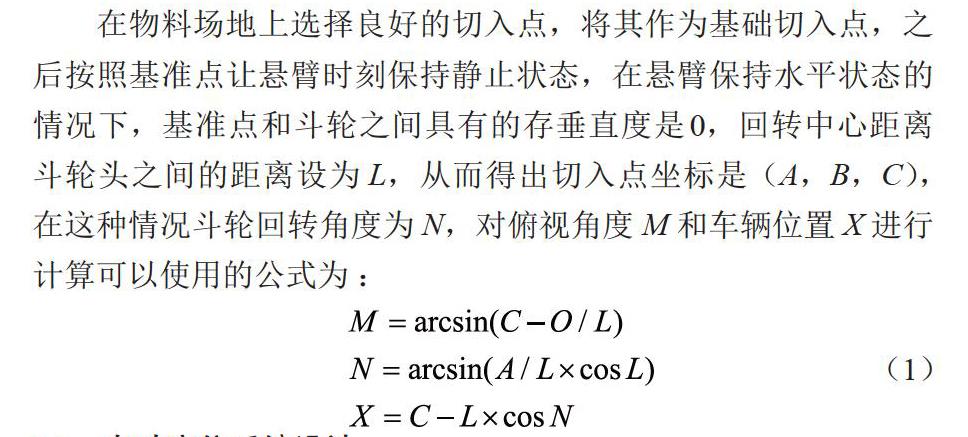
3.2 斗轮切入点计算
在物料场地上选择良好的切入点,将其作为基础切入点,之后按照基准点让悬臂时刻保持静止状态,在悬臂保持水平状态的情况下,基准点和斗轮之间具有的存垂直度是0,回转中心距离斗轮头之间的距离设为L,从而得出切入点坐标是(A,B,C),在这种情况斗轮回转角度为N,对俯视角度M和车辆位置X进行计算可以使用的公式为:
(1)
3.3 自动定位系统设计
在PLC系统中拥有独立的自动定位模块,通过应用编码器的方式逐渐获取行走机构,确定斗轮和回转结构的位置,通过及时纠正错误位置方式降低数据误差度,使用变频器控制的方法可保证每个机构的移动效果。在定位大车行走机构过程中,大车位置坐标可以设置成X,系统参数是Y,若是大车位置指向锚定点,在X>Y的情况下,最大差值的绝对值会在8之上,大车速度也就是V,始终朝着正方向逐渐移动。若是绝对差值在8以内,那么大車就会沿着负方向逐渐移动,若是X=Y,车辆处于完全静止状态。在回转机构定位过程中,可以将实际旋转角度设为A,系统参数值设为B,在A大于B的情况下,得出的绝对值会在8之上,悬臂也会快速向右进行旋转,绝对差值在8以内的情况下,悬臂会缓慢向右进行旋转。在B小于A的情况下,绝对值在8之内,旋转角度为w,旋转方向始终为右。在X和Y数值相等的情况下,悬臂会时刻保持静止状态。
3.4 自动循环取料系统设计
在使用PLC中控系统时,需要根据实际的作业机构位置以及信息确定三维轮廓信息,构建全面科学的三维数据坐标库,之后计算出取料边界,将斗轮和边界作为坐标系建立的切入点。在回转机构和行走机构完成定位之后,斗轮下方会与切入点之间保持重合状态,发现这种情况时可开启取料命令。进行取料操作过程中系统会经过条件模块对回转机构进行测量,同时还能实现微调操作,逐渐增加回转机构的旋转速度,让取料的流量时刻保持恒定状态。一定要保证调节模块可以得到足够的电流支持,这样才能将得到的数据回转到机构中,电路质量也非常重要,会直接影响电流回转速度以及效果。在设备应用过程中需要将回转机构作为中心点,根据回转中心确定悬臂和半径之间的距离,从而绘制出良好的回转机构平面图,回转机构平面图如图1所示。
通过对图1进行观察得出,几何关系可以直接表示出回转角度以及旋转速度之间的关系,一定要控制好旋转角度和旋转速度,保证取料的效果符合标准,提供足够的供给距离,让物料深度和厚度都可以满足实际操作标准。在进行物料堆放和获取过程中,需要在满足d和h的情况下控制旋转速度,按照已有的逻辑对数据关系进行编辑,最后录入到编程控制设备中,在每次开展物料作业的准备阶段,都需要对物料流量进行控制,还需要使用编码器计算出回转角度,最后将其传输到PLC系统中。在斗轮头部出现移动的情况下,首先需要确定物料位置,之后改变已有的回转机旋转方向,持续取料,使用反复循环的方法达到理想的物料堆取效果。在完成取堆取料工作之后,需要及时发出暂停命令,这样斗轮就会逐渐移动到下一层切入点,让切入点具有稳定性。在没有发出任何指定程序的情况下,系统会处于待命状态,只要输入正确的堆取命令,程序将会自动进行控制与监督。
4 结语
综上所述,本文在研究的开始阶段对港口堆取料机组成机理、功能进行了介绍,之后对自动控制系统设备进行了深入分析,通过研究的方法得出为了保证港口堆取料工作效率,提升日常工作的准确性以及合理性,就要针对港口堆取料机控制系统的基本原理进行了解,完成系统模式的更新,提升系统操作的稳定性以及准确性,保证自动化系统的先进性,为行业发展提供稳定基础。
参考文献
[1] 李响初,张微.基于PLC的矿山堆取料机自动控制系统研究与设计[J].世界有色金属,2017(18):45-46.
[2] 周东锋,陈旋,赵志安,等.烧结优化混匀配料的控制系统[J].金属世界,2008(3):47-50.
[3] 王庆芳,马永明,陈长勇,等.集散控制技术在安钢混匀料系统中的应用[J].钢铁研究,2006(3):48-50.