基于激光雷达SLAM的核电站高放过滤器滤芯转运机器人研究
2021-06-11张红赵阿朋罗刚陈少南王国河
张红 赵阿朋 罗刚 陈少南 王国河

[摘 要]核电站高放过滤器通常每个燃料循环更换一次,滤芯剂量高,转运路径复杂,路程远,人工转运面临高辐照风险,对高放过滤器滤芯的转运研究开发一种基于激光雷达SALM技术的滤芯转运机器人。
[关键词]高放过滤器;滤芯转运;激光雷达;SLAM
[中图分类号]TP242 [文献标志码]A [文章编号]2095–6487(2021)01–00–03
Research on the Transfer Robot for High-Level Filter Element of Nuclear
Power Plant based on Laser radar SLAM
Zhang Hong,Zhao A-peng,Luo Gang,Chen Shao-nan,Wang Guo-he
[Abstract]Nuclear power plant high-level filter is usually replaced once per fuel cycle. The filter element dose is high, the transport path is complicated, and the distance is long. Manual transport faces high radiation risks. The transport of high-level filter elements is researched and developed based on lidar SALM technology. Filter transfer robot.
[Keywords]high-amplification filter; filter element transfer; lidar; SLAM
核电站系统设备结构复杂,设备本身或其运行环境具有放射性,为保证设备安全可靠,核电站需周期性进行停堆检修,及时发现并更换老化、故障设备,并对废弃核装置进行去污和拆卸等,以保证核电站的安全运行。在维修活动中,往往涉及高放射性场所,操作者难以接近,而且伴随着高温、高噪音、狭窄空间、低光照等复杂恶劣环境,给维修活动带来极大困难,仅靠人工进行,不仅维修效率低下,降低核电站运行的经济性,而且会增大人员的受辐照剂量。而我国核电站现阶段绝大部分维修及更换作业采用人工作业的方式,如化学与容积控制系统(以下简称RCV)高放过滤器更换均采用人工方式进行。
RCV高放过滤器位于环境剂量率较高的设备厂房,其过滤器滤芯通常每个燃料循环更换一次,部分核电站经过工艺改进后,更换频率更高,达到每个月更换一次。更换时由于工作人员面临高辐射风险,需穿戴铅衣等防护用品,并做好人员分工,事先安排好传递人员接力传递位置,紧密协作,并对所经过的通道实施严格隔离与封闭。更换时打开法兰盖,手动抽出后迅速将高放射性的滤芯通过接力传递的方式通过狭长狭窄通道、不规则楼梯等复杂环境后放入专用的废滤芯水泥存放桶。针对RCV高放过滤器滤芯更换的复杂性、高风险性、高辐照性,研发RCV高放过滤器更换机器人系统,代替人工方式进行作业,可以进入RCV高放过滤器房间,实现RCV过滤器滤芯的自动抽出、搬运和最终放置,减小人工操作的高风险及人员辐照剂量,实现核电站部分运维作业的机器人化以及智能化,推动智能核电运维工具的发展。
1 系统组成
RCV过滤器滤芯转运机器人属于RCV过滤器更换机器人系统一部分,用于RCV高放过滤器滤芯从过滤器厂房转运至废滤芯桶存放厂房,滤芯转运距离远,路径复杂,而更换的滤芯放射性剂量高,转运人员面临高辐照风险,使用机器人替代人工转运非常必要。
RCV过滤器滤芯转运路径狭窄,需经过多道防火门,部分防火门最大开启宽度受限且有50mm左右门槛,需通过两座梯形斜坡,机器人要求转弯半径小,有一定越障能力,通过梯形斜坡时稳定性较好。如图1所示。
综合考虑现场环境条件,RCV高放过滤器滤芯转运机器人设计使用履带底盘加升降滤芯桶的结构形式,機器人整体结构,如图2所示。
机器人主要包括以下机构:履带式底盘、滤芯桶升降系统、远程控制系统、导航定位系统、视频采集系统及通讯系统等。
1.1 履带式行走机构
履带式行走机构采用差速驱动,转弯半径小,适合电站内狭窄的工作环境;越障性能较好,能轻松越过路径上的门槛。
1.2 滤芯桶升降系统
滤芯桶用于临时存放高放废滤芯,为了包容和尽可能的屏蔽滤芯的放射性,选用辐射屏蔽能力强的铅桶作为滤芯桶;滤芯桶与底盘采用铰链连接,紧急情况下可快速拆卸;滤芯桶设计有升降机构,可在30°~90°范围内旋转,机器人行走过程中滤芯桶放倒,降低机器人整体重心高度,增加通过梯形斜坡的稳定性;滤芯桶顶部设计盖子,可以远程控制打开关闭;底部设计有排污口,方便滤芯桶的排污及清洗去污。
1.3 视频采集系统
视频采集系统通过成像功能,将机器人周围环境情况反馈至现场外的操作人员,同时操作人员可通过远程摄像头监控机器人的运行状态。
1.4 SLAM导航定位系统
使用SLAM技术获得较精确的建图与定位结果,然后以SLAM输出作为组合导航系统的输入,进行多传感器数据融合,最终输出建图与导航全信息:包括位置,速度,姿态等。
2 控制系统
2.1 系统硬件架构
RCV高放过滤器滤芯转运机器人的控制系统由控制箱、视频采集系统和导航定位系统组成。整体架构如图3所示。
控制箱用于远程操作RCV高放过滤器滤芯转运机器人并显示机器人状态,控制箱是一个方便携带的手提箱。
视频采集系统由车体顶部的云台相机和车体四周的微型相机组成,由交换机连接,通过无线通信在工控机显示屏上显示,操作人员可通过在显示屏上观察机器人的作业状态及周边的作业环境,并通过上位机来控制相机的云台、变焦及灯光等。
SLAM导航定位系统主要由三维激光扫描雷达、车体前后激光防撞雷达、左右超声测距雷达、摄像头、组合惯导、算法板、主控板、里程计和电机等组成。
2.2 激光雷达SLAM导航定位系统
目前主流的机器人定位技术是SLAM技术。SLAM技术的实现途径主要包括视觉SLAM(VSLAM)、Wifi-SLAM与激光雷达SLAM。VSLAM指在室内环境下,用摄像机、Kinect等深度相机来做导航和探索,但是室内的VSLAM对环境要求高,对于光照不足、墙面反光的厂房环境不适用,而且计算量太大,对机器人系统的性能要求较高。Wifi-SLAM指利用智能手机中的多种传感设备进行定位,包括Wifi、GPS、陀螺仪、加速计和磁力计,并通过机器学习和模式识别等算法将获得的数据绘制出准确的室内地图,该技术在拥有强屏蔽环境的核电站厂房显然不适用。激光雷达SLAM指利用激光雷达作为传感器,获取地图数据,使机器人实现同步定位与地图构建。该技术经过多年验证,已相当成熟,仅有的价格昂贵的缺点相对于核电环境人工作业的高辐照风险也在可接受的范围内。并且激光雷达具有指向性强的特点,使得导航的精度得到有效保障,不仅可以在有环境光的情况下工作,也可以在黑暗中工作,而且在黑暗中测量效果更好,因此最终滤芯转运机器人选用激光雷达SLAM导航定位方案。如图4所示。
激光雷达SLAM导航定位系统按照功能主要分为3大部分:环境感知系统、规划决策系统和底层控制系统。
环境感知系统利用机器人周围安装的传感器进行环境地图的构建及环境信息的探测和识别处理,主要包括传感器模块、SLAM建图模块和多传感器数据实时融合处理模块。
主要传感器模块有激光扫描雷达、摄像头、防撞雷达和超声测距传感器、组合惯导、里程计。激光扫描雷达提供高精度的环境障碍物探测点云数据,其功能兼顾建图和周身环境实时扫描检测和识别,以建图匹配定位功能为主,以目标探测感知为辅;激光防撞雷达和超声测距雷达主要提供机器人周围障碍物信息,与激光雷达和摄像头融合处理,辅助定位;组合惯导提供机器人的位姿变化及辅助定位信息;里程计提供机器人运动距离信息系统。采用高精度多传感器融合技术,集成激光雷达、高精度组合惯导和SLAM算法实现室内环境数据实时采集和测量,确保了系统的可靠性。
SLAM建图模块以机器人车体顶部的激光扫描雷达为主传感器对机器人工作的区域环境进行扫描探测,利用激光SLAM技术进行大场景的实时地图建模,从而为路径规划和定位匹配提供精确的激光高精地图信息。
多传感器融合处理模块是机器人环境感知的重要单元,通过将激光雷达和摄像头标定到统一坐标系,然后利用深度学习算法进行机器人车体前方目标的探测、识别融合处理,得到障碍物ID、中心坐标、大小、速度等信息,同时可进一步分割出环境边界和路沿信息。
决策系统算法的核心任务是基于感知层系统算法的输出结果,给出最终的行为/动作指令,包括行为决策(机器人的启动和停止)和动作决策(机器人的转向、速度等)等,具体功能包括实时避障、实时定位和路径规划导航。
机器人在全局路径自动导航过程中遇到的前方动态障碍物目标以及路面路况信息,根据感知模块的输出结果,避障模塊做出局部路径规划实时避开障碍物,做出决策行为。
实时定位模块采用如下融合的形式。
(1)采用航迹推算,依靠IMU(惯性测量单元)等,根据上一时刻的位置和方位推断现在的位置和方位。
(2)环境特征扫描匹配,基于激光雷达的定位,用观测到的特征和数据库中的特征和存储的特征进行匹配,得到现在车的位置和姿态。如图5所示。
路径规划导航是机器人核心功能,也是决策系统的主要功能,利用感知层系统的信息,利用全局规划给出运动的路线,同时根据避障信息的局部规划功能做出具体的行为规划和运动规划,最后转换为一系列连续的导航航迹目标运动。如图6所示。
执行系统主要实现的是根据融合决策系统给出的路径规划信息完成航迹跟踪运动和机器人控制。其中主要的航迹跟踪算法框图,如图7所示。
根据机器人底盘的运动模型,将解算出的线速度和角速度进行平稳控制即可。
2.3 上位机
上位机人机交互系统操作界面由多个窗体界面组成,包括登录界面、主界面、参数设置、报警显示、帐户管理等画面,操作界面使操作员实时获取机器人状态信息,并下达操作指令。
如图8所示,为开发的RCV过滤器滤芯转运机器人主界面截图,上位画面动态显示车体环境实时建图信息、车体环境视频信息、车体位置信息、滤芯桶升降系统状态信息、运动状态、车体运动控制等信息。
3 试验测试
根据RCV过滤器现场环境及滤芯转运路径,在试验厂房搭建模拟场景和转运路径,模拟场景,如图9所示。
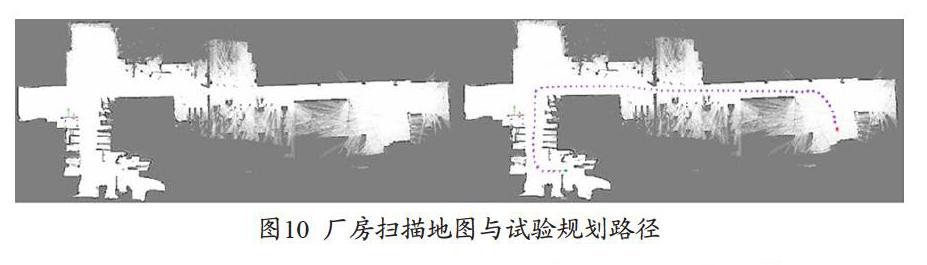
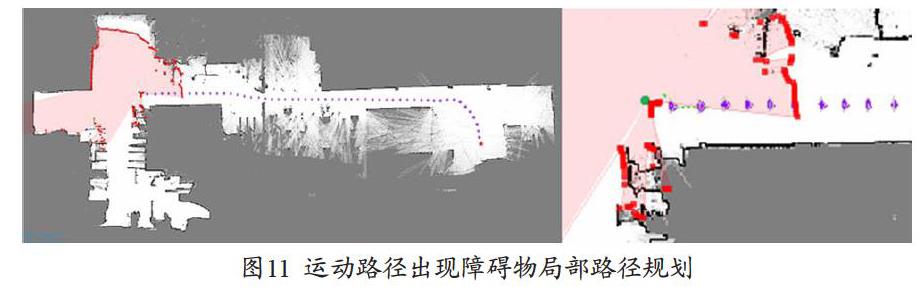
如图10、11所示,圆圈为机器人本体,五角星为目标位置,小三角为路径点,机器人按照规划路径前进。试验中在路径中临时放置障碍物,红色点为激光雷达扫描到的障碍物反射点,机器人能实时检测并局部重新规划路径,绕过障碍物,并最终到达目标位置。
4 结语
经过测试及验证,RCV过滤器滤芯转运机器人能完成复杂环境下的滤芯转运,根据目标位置,自主完成路径规划和实时建图定位导航,自主避障,各系统模块功能正常,整机工作性能稳定,机器人整体功能满足使用要求,可为电站类似应用场景提供应用参考。
参考文献
[1] 廖子威.激光雷达/微惯性室内自主建图与导航技术研究[D].南京:南京航空航天大学,2016.
[2] 孙凤池,黄亚楼,康叶伟.基于视觉的移动机器人同时定位与建图研究进展[J].控制理论与应用,2010,27(4):488-494.
[3] 赵钰.基于激光传感器室内机器人自主导航技术研究[D].天津:天津理工大学,2017.
[4] 郑向阳,熊蓉,顾大强.移动机器人导航和定位技术[J].机电工程,2003(20):35-37.