基于MR 技术的电力线路智能巡检系统
2021-06-11许继葵徐研张珏单鲁平郑志豪
许继葵,徐研,张珏,单鲁平,郑志豪
(广东电网有限责任公司广州供电局,广东广州 510000)
输电线路的可靠性与稳定性对社会的发展至关重要[1],与安全距离相比,高压输电线路与外部障碍物的距离必须更远。电力传输线路最常见的外部障碍物是建筑物与工厂,尤其是生长不规则的超高植物,是输电线路安全性的潜在威胁。当工厂距离电源线较近时,会导致异常放电,然后电源线会出现发热与断裂现象[2]。因此,复杂的地形、植物生长所处的恶劣环境会使得电力线路巡检步骤繁琐、费用昂贵,且存在一定的危险性。目前,已有一些电力线路巡检方法投入实际工作,主要涉及4 个方向:足巡、传统飞行器、爬坡机器人、无人机[3-4],但无人机技术一直难以突破续航能力弱这一技术瓶颈[5]。随着智能穿戴设备技术的不断进步,在增强现实(Augmented Reality,AR)及虚拟现实(Virtual Reality,VR)技术的基础上,已有更多的智能可穿戴设备应用于现场服务与检修工作[6]。综合增强现实与虚拟现实,可以得到一种能够合并现实世界与虚拟世界的混合现实(Mix Reality,MR)下的可视环境,在真实世界与虚拟对象共存的基础上实现互动[7]。
1 系统设计
文中设计了一种基于MR 技术的电力线路智能巡检系统,系统中各模块的功能及关系如图1 所示。

图1 系统中各模块功能及关系
系统主要由操作界面模块、综合分析模块、指导监督模块3 个模块组成,其中人机交互主要通过操作界面模块完成,同时能够将采集到的环境特征信息传送给综合分析模块。综合分析模块主要根据操作需求与预设信息对所需要分析的信息进行分析处理,同时接受监督模块的实时监督,并将指导信息反馈到综合分析模块[8-9]。系统操作运行流程如图2所示。
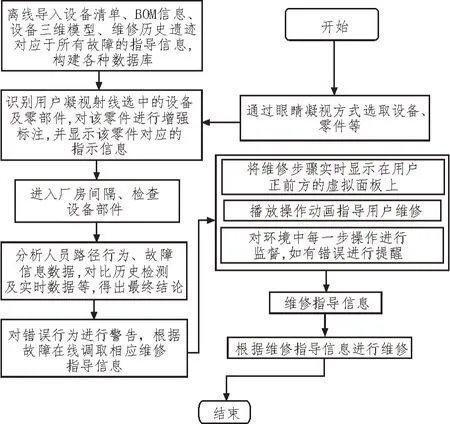
图2 系统的工作流程
2 电力线路智能巡检方法
系统的综合分析模块根据外部操作获得电力线路设备的图像,并对其进行处理,以明确故障信息[10]。根据实际的电力线路分布情况建立电力线路模型,得到较为复杂的背景环境,以检验系统能否在实际工作中保持较优的适用性[11-12]。在实际处理中,连续的图像帧不包含相同的内容,系统依次处理所有的帧图像。
2.1 图像预处理
假设眼部获取的左图像为Tz、右图像为Ty,图像预处理包括图像灰度变换和边缘检测。首先,系统将RGB 图像Tz与Ty变换成灰色图像Hz和Hy。其次,系统检测出属于边缘的图像点,常用的边缘检测方法较多,每种方法均有各自的优缺点。然而,这些方法在复杂环境中应用时,稳定性较差且背景噪声大。为此,采用了高斯差分(Difference of Gaussian,DoG)边缘检测方法,其具有较优的稳定性,在复杂的背景下突出了电力线路的边缘[13-14]。DoG 是将不同参数下的高斯函数相减所得到的结果,将DoG 处理后的图像定义为D,其表达式如式(1)所示。

式中,σ1=0.6,σ2=0.9,H是灰度图像,图像的滑动滤波器由符号“×”定义。
2.2 电力线路检测
根据人眼的特点,提出了一种通过线性边缘检测电力传输线的新方法。具体方法如下:
1)由于人眼的移动方向与电力传输线的分布方向是平行的,所以电力传输线在图像中是垂直分布的。首先,利用线性结构因子对图像进行多次膨胀与侵蚀,定义如式(2)所示。

2)对于检测图像中的线段,将相同斜率范围内的线段恢复为直线。由于传输线贯穿整个图像,因此可以通过线性连接域的分布来检测电力传输线。
2.3 图像配准
在检测系统中,由于障碍物上的点是连通的,因此无需对图像中的所有像素进行配准[15]。在传统加速稳健特征(Speeded Up Robust Features,SURF)算法的基础上,对匹配策略进行优化。实验表明,该算法能够有效提高图像配准的速度与精度。可见,选择的特征点在图像中是随机分布的,图像配准的具体步骤如下:
1)利用SURF 算法在尺度空间中检测图像的特征点,在图像滤波过程中,SURF 算法选择不同大小的窗口,利用Hessian 矩阵提取特征点。图像中的点由Hessian 矩阵定义如式(3)所示。

式中,σ是在不同尺度上的变化量。
2)以当前特征点为中心,沿该点的主方向构造一个边长为20σ的正方形区域,将该区域划分为16 个小区域,计算每5σ×5σ个区域的Harr 小波响应。所以,每个分区均可以用v=(∑dx,∑|dx|,∑dy,∑|dy|)来表示。最终,得到了64 维描述点。图像中的突出点定义如式(4)所示。

式中,P1 与P2 分别为左右图像中的特征点集。
3)计算P点集中所有点之间的欧氏距离,选择欧氏距离最小的点作为粗匹配点。根据欧氏距离按升序对匹配点进行排序,删除异常点。在匹配点中选择顶点,定义为式(5)。

4)根据PK中对应点之间的斜率来筛选匹配点。具体而言,首先计算各边坡的频率,通过剔除异常边坡形成新的边坡集knew={k1,k2,…,kq}。其次,定义了一组新的匹配点,如式(6)所示。

2.4 障碍物探测
使用双目视觉相机的目的是精确计算外部障碍物与电源线之间的距离信息[16]。在该过程中,根据双目视觉的特点得到二维图像中障碍物与电力线路的三维信息。双目视觉成像原理如图3 所示。

图3 双目视觉成像原理
在图像坐标系中,P点的空间坐标可以定义为式(7):

式中,b为基线,f为焦点。
通过同时计算电力传输线上各特征点的空间坐标与P点的空间坐标,以该点与电力传输线之间的最小欧氏距离判断当前点是否为障碍物。最终对所有的点进行处理,将小于阈值的点标记为障碍物,并在一定范围内扩大障碍物的面积。
3 实验结果与分析
3.1 森林等复杂环境下的线路巡检
实验是在以树木为主的混合环境中进行的,在头戴HoloLens 的正常移动过程中,电力传输线几乎垂直分布在双目摄像机拍摄的图像中。在分析过程中,首先通过人工测量标出外部障碍物,并将测量结果记录在相应的表格中;然后通过系统数据与实测数据的比较,分析系统的性能。其中,所提巡检系统得到的图像如图4 所示。

图4 巡检系统所得到的图像
在实验中,使用多个连通域来描述真实的障碍区域,但若连接的域与障碍物不对应,则将其判断为错误检测。实验结果如表1 所示,为便于统计分析,文中对数据进行了归一化处理。
从表1 可以看出,系统检测数据与实测数据相差较小,将误差数值与实际距离相除,得到相对误差约为3.8%,在可以接受的误差范围内。由此,可论证所提巡检系统是有效的。
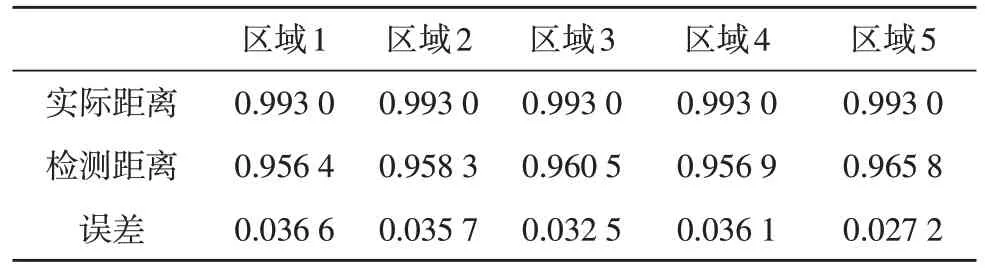
表1 系统检测数据与实测数据值
3.2 系统性能对比
为验证所提算法的性能,将该系统与文献[5]、文献[8]及文献[10]中的系统分别从检测时间与准确性两方面进行对比,对比结果分别如图5 和图6所示。

图5 不同系统的检测时间对比
由图5 可知,所提系统在检测时间方面具有明显优势,尤其当检测对象数量较大时,其他对比系统所需的检测时间通常呈倍数增长,而所提系统则能以较短的时间完成输电线路巡检。
由图6 可知,对于发现输电线路中存在的安全隐患,相比于文献[5]、文献[8]及文献[10]中系统,所提系统具有更高的准确性。在较少的检测对象中,所有系统的准确性相近。但随着检测对象数量的上升,其他对比系统对于隐患发现的准确性有所下降。

图6 不同系统的检测准确性对比
由此可见,所提系统在巡检输电线路的过程中,无论是检测速度还是准确度,均优于现有巡检系统。
4 结束语
沉浸式3D 电力应用软件已出现,并且VR 技术的可视化优势使得系统有较好的应用前景。通过对电力行业特殊环境的分析,结合MR 技术的突出优势,在实现虚拟与现实结合的基础上提出了一种基于MR 技术的电力线路智能巡检系统。该系统的整体架构包括操作界面、综合分析、指导监督3 个模块,并根据人眼的特点,提出了一种线性边缘的电力线路检测方法,进一步提高系统对图像的处理能力。在HoloLens 对所提系统进行论证,实验结果表明,所提电力线路巡检系统能够在短时间内较为准确地检测出线路中存在的障碍物,且检测误差较小。
