基于深度学习的肌电信号预测的研究
2021-06-10张志坚
张志坚
摘要:肌电图分析是解释人体运动意图的有效手段。一些研究已经成功地利用肌电信号识别固定姿势,并将其应用于假肢的操作。本文计划研究进一步辨识肌电的连续动态运动,以建构能接受更精细运动指令,使截肢者也可以像普通人一样使用假体来进行平滑的运动。本研究的目的是在前臂连续运动的执行过程中,找出肌电信号与手臂运动的关系,并利用肌电信号实时预测使用者预期的前臂运动。本文提出了一种动态递归神经网络的非线性自回归外生输入模型和矢量量化时间联想记忆学习算法,并在3个实验对象和两个自由度动态运动的基础上进行了实验。实验结果表明,该方法能够利用肌电信号在一系列连续运动中立即估计出前臂的位置,可用于精密假肢的控制。
关键词:肌电;预测;神经网络;自由度
中图分类号:TP391 文献标识码:A 文章编号:1001-5922(2021)02-0134-04
近年来,随着测量设备和方法的快速发展,电机、信息、生物、医学等领域的学者开始有能力将人体复杂的工作模式研究成分析和仿生仿真。该领域最热门、最困难的研究课题是与神经系统相关的信息研究。作为支配身体的控制和感觉交流,神经系统的作用可以简化为3个阶段:感觉受体接受刺激、大脑进行性解释和命运、效应器运动。在这3个阶段中,生物负责通过电传递信息。目前的研究大多集中在对这些电生理信号的采集和应用上:例如,通过分析感觉感受器产生的电生理刺激,通过接收眼、耳等外部信号,并将其转换成正确的电生理信号进行刺激神经系统的仿生器官;通过分析感觉受体产生的电生理刺激。
在本研究中,尝试分析肢体运动中前臂运动所产生的肌电信号。研究的主要对象是前臂靠近胸部的垂直运动,上臂肌肉和胸背肌控制运动的肌电信号。对于动态运动的肌电识别方法,考虑到多肌肉的收縮和多肌肉与骨骼的耦合问题,将生物医学模型用于前臂运动分析将使模型设计难度加倍。因此,在本文中,提出一个递归模型,称为动态递归神经网络的非线性自回归外生输入模型和矢量量化时间联想记忆学习算法。
1模型架构与方法设计
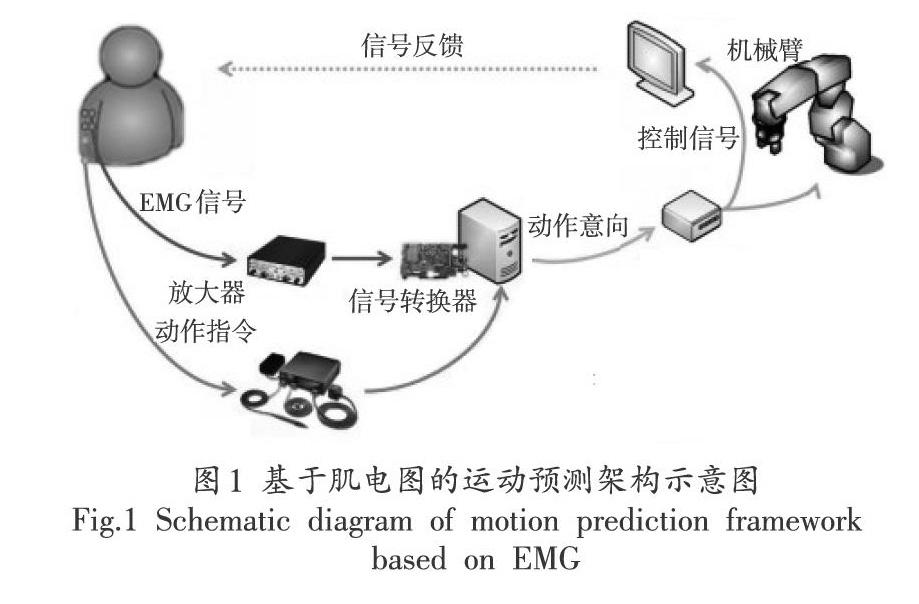
图1是模型控制系统,使用肌电图动作预测机制作为人机输入接口,该结构显示了预测机制在控制系统中的位置和功能。该控制系统结构灵活,大致可分为3个部分:信号采集部分、运动预测接口和终端控制系统。在信号采集单元中,包括信号放大器、比位转换卡、运动跟踪系统等硬件测量仪器,等,用于捕捉用户当前前臂运动,并输出进行采样和记录,以刺激肌肉收缩,并由收缩肌电信号和肌肉收缩驱动的运动轨迹位置。第二部分对肌电信号进行分析,基于循环运行网络模型的动态估计接口和前一节记录的肌电信息,将组合轨迹和对应轨迹的训练数据输入网络,进行网关分析和映射学习。第3部分为位置控制,为控制器和被控制体提供一个合适的控制系统,以避免用户从接收运动估计界面输出的动作意图。
2运动预估机制设计
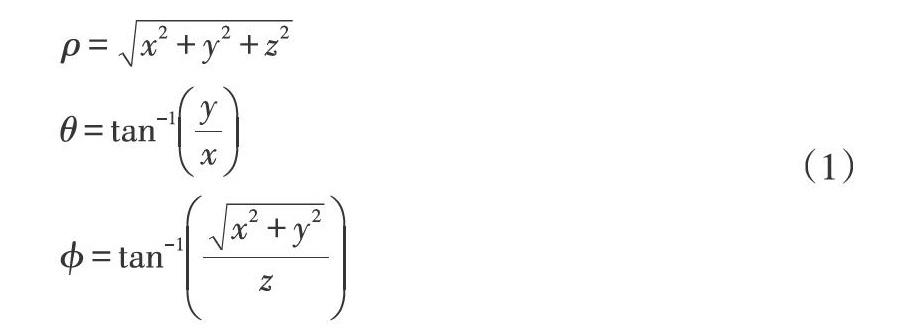
为了获取前臂的空间运动信息,在前臂的肘部和腕部设计了三维跟踪系统传感器,使肘部和腕部的运动坐标同步。此外,为了更有效地描述前臂的运动,引入球坐标系来描述前臂的运动轨迹。图3显示了前臂上定义的球面坐标系。将轨迹转化为球坐标,从肘部传感器的空间坐标值中减去腕部传感器的空间坐标值,得到以肘部为原点的腕部位置对应的一组空间方向(x,y,x),描述手臂的当前状态。然后将(x,y,z)代入球面坐标变换公式:
最后,得到了弹道的球坐标P=(p,θ,φ)。φ应于由胸背肌的收缩和放松引起的前臂内旋和外旋的运动,对应于上臂肌肉的收缩和放松。这样,球坐标自然会与控制前臂运动的肌肉收缩方向相对应,从而进一步增强前臂运动状态与肌电信号变化的关系。因此,在前臂运动过程中,球坐标系只需要两个变量来描述运动轨迹。模型的输出和估计值需要从原始坐标系中的3个元素转换为球面坐标系。
3深度学习学习策略
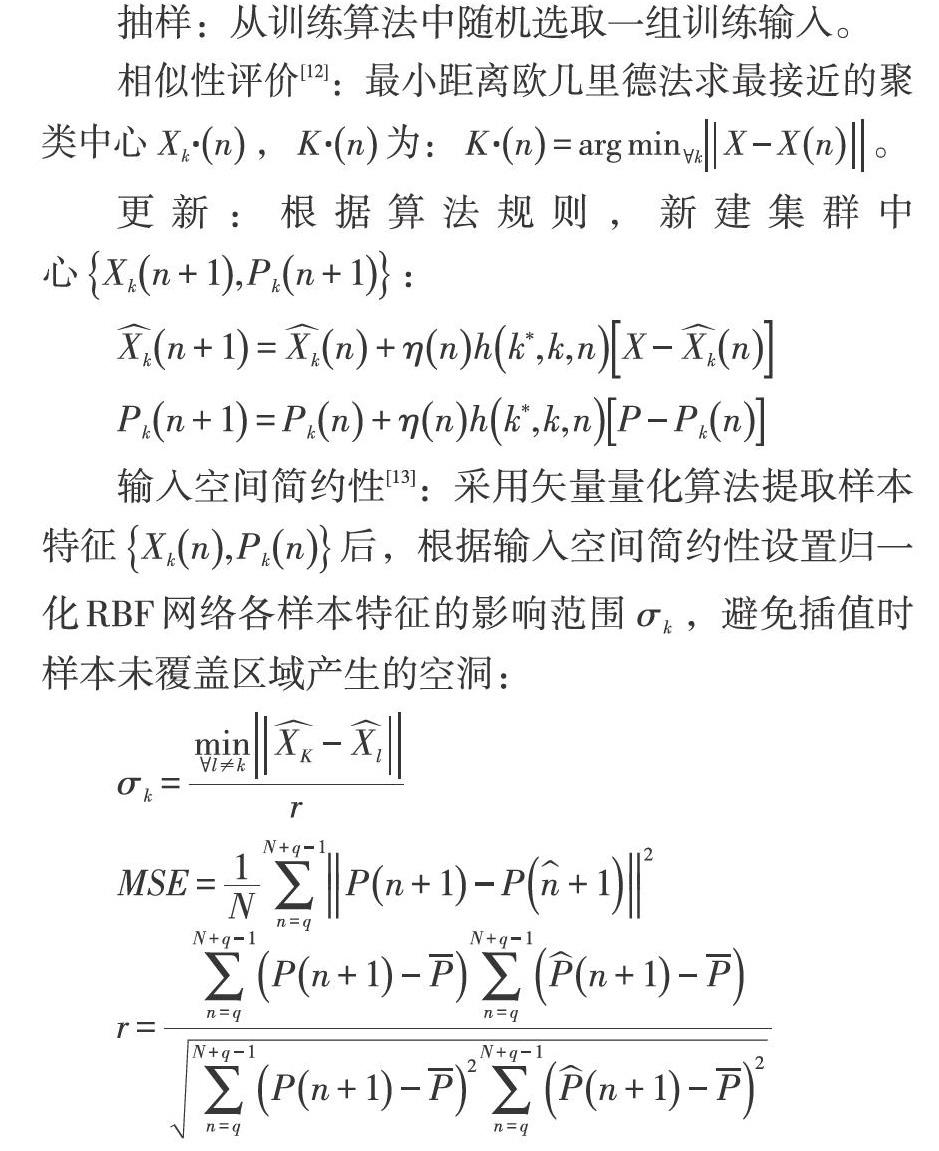
本研究使用了Narendram和Parthasarathy提出的串并联结构。其结构特点是在训练过程中使用目标系统的实际输出,而不是原来由网络构建的输出。在学习算法设计方面,各系统的实际输入输出训练数据集可以作为事件机样本,通过并行结构作为规范化网络模型的要点。但是,为了保证机器值的稳定性,使用属于内存基结构的网络模型来采集大数据点时,可能会出现计算结果耗时的问题。因此,有时会引入原型方法来集中相似的子群数据。然而,常用的无监督聚类算法,如k-means算法,只能在一个空间域内进行聚类。本文提出一种特殊的非定向聚类算法:基于自组织特征映射算法的矢量量化时间联想记忆模型。
基于自组织特征映射算法的矢量量化时间联想记忆模型从获得的训练数据中提取并建立静态导线网。以下是算法过程:
4实验与数据分析
4.1实验设计
通过采集数据建立学习模型的目的不仅仅是映射内存给定的数据,彻底减少输出误差,而是提取数据的特征,从而建立一个能够表示数据的统计模型。因此,模型训练的目标应该是为尚未获得的新数据建立模型。在模型结构和学习算法确定的基础上,通过改变模型的复杂度来调整模型,实现类型的提升。模型的复杂性主要由两个因素控制:一个是模型的输入维数,另一个是模型的可调维数。输入维数越大,可调维数越高,模型的复杂度越高,在模型中,这两个因素分别用延迟长度和归一化网络元素表示,在选择了最佳长度后,进行测试,最终完成网络学习。用均方误差(MSE)和相关系数(r)假设在上述验证过程中用于构造误差值的成本函数。公式如下:
由于肌肉大小和运动习惯等生理差异,每个人对同一动作产生的肌电信号几乎相同。因此,有必要研究该系统对多个实验个体的适用性。3名受试者被邀请参加这项研究。受试者以男性为主,身体素质存在显著差异。其中一人还经常锻炼肌肉,进行研究。
4.2实验数据分析
以下结果将在实验设计的第二部分中给出,其中1作为测试。首先,调整模型的复杂性。第一部分是调整测试。在调整中,为了避免系统预测误差,通过对误差信息进行放大,使输入延迟大于反馈延迟,以保证输入项有足够的能力调整系统误差。
测试结果如图2(a)所示。当输入延迟约为12时,误差MSE最小,相关系数r最大。然而,当长度增加导致模型复杂度增加时,广义误差也开始增大,因此选择输入延迟12个单位最佳延迟长度。图2(b)所示,当子午线元数在200左右时,误差MSE最低,相关系数r最高,当子午线元数继续增加时,泛化误差也开始增加。从图2(b)可以看出,预测的轨迹与实际轨迹几乎一致。
5结语
为了有效地识别前臂在多自由度、多肌肉连续运动中产生的肌电信号,建立肌电信号与运动学信息的映射关系,文章提出了一种通过学习逼近动态系统的递归遍历网络自动建模和分析。本研究所使用的递归网络模型,利用一种快速、无方向的学习算法将学习框架与训练相匹配,以缩短建模时间。实验结果表明,所提出模型和学习策略在经过设计的二自由度连续运动试验后,能够快速、完美地再现映射关系,表明所提出的模型和学习策略能够分析肌电与运动学的动态关系。
