MSMA自感知执行器结构设计与信号处理研究
2021-06-10鲁军张源鑫冯凯旋季宝爽贾士杰
鲁军, 张源鑫, 冯凯旋, 季宝爽, 贾士杰
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
0 引 言
近年来,智能材料的研发与应用已成为国内外研究的热点。磁控形状记忆合金(MSMA)作为一种新型智能材料,具有输出应变大、响应速度快、能量密度大等特性,因此将其应用于新型智能器件的研究具有重要意义[1-2]。
当前,压电材料以及超磁致伸缩材料是在自感知执行器中使用较多的材料。基于电桥电路的压电自感知执行器由Dosch等人提出,在感知到位移以及速率信号之后,对悬臂梁分别进行振动位置以及速率反馈控制[3]。Pratt和Flatau首次提出超磁致伸缩自感知执行器的概念[4],推导出感应电压表达式,利用GMM模型中磁通量的变化来测量外部的速度和力。李涵、董维杰等人提出空分复用的方法,在同一压电双晶片上分割出作用不同的电极[5]。浙江大学对超磁致伸缩自感知执行器做了一些研究工作[6]。MSMA的研究多集中在MSMA执行器、传感器和振动能量采集器等方面[7-12],而MSMA材料在自感知执行器中的应用研究比较少,所以基于MSMA的可逆性设计自感执行器具有很高的研究价值。
本文进行传感器与执行器功能集成的自感知执行器的铁心结构设计;对含有干扰噪声[13]的自感知执行器的传感信号,采用LMS自适应滤波器进行信号处理;基于时分控制[14]和MSMA自感知执行器的工作特点,设计合理的开关电路,实现传感信号与控制信号的真正解耦。
1 MSMA自感知执行器实验装置
MSMA自感知执行器工作原理如图1所示。在MSMA自感知执行器中设计永磁体的目的,是提供一个偏置磁场H0给MSMA元件,使其在磁场作用下发生应变,当力作用于元件时,元件自身特性变化能够引起磁路中磁通发生变化;传感线圈将变化的磁通转换为感应电压信号;信号调理电路将传感信号进行处理,将信号调整为可供ADC采集的0~3 V的电压信号;DSP处理传感信号数据,判断MSMA自感知执行器的受力大小,励磁控制电压由DAC输出;功率放大电路对励磁电压进行放大,使MSMA自感知执行器输出大小合适的力来抵消外部作用力。
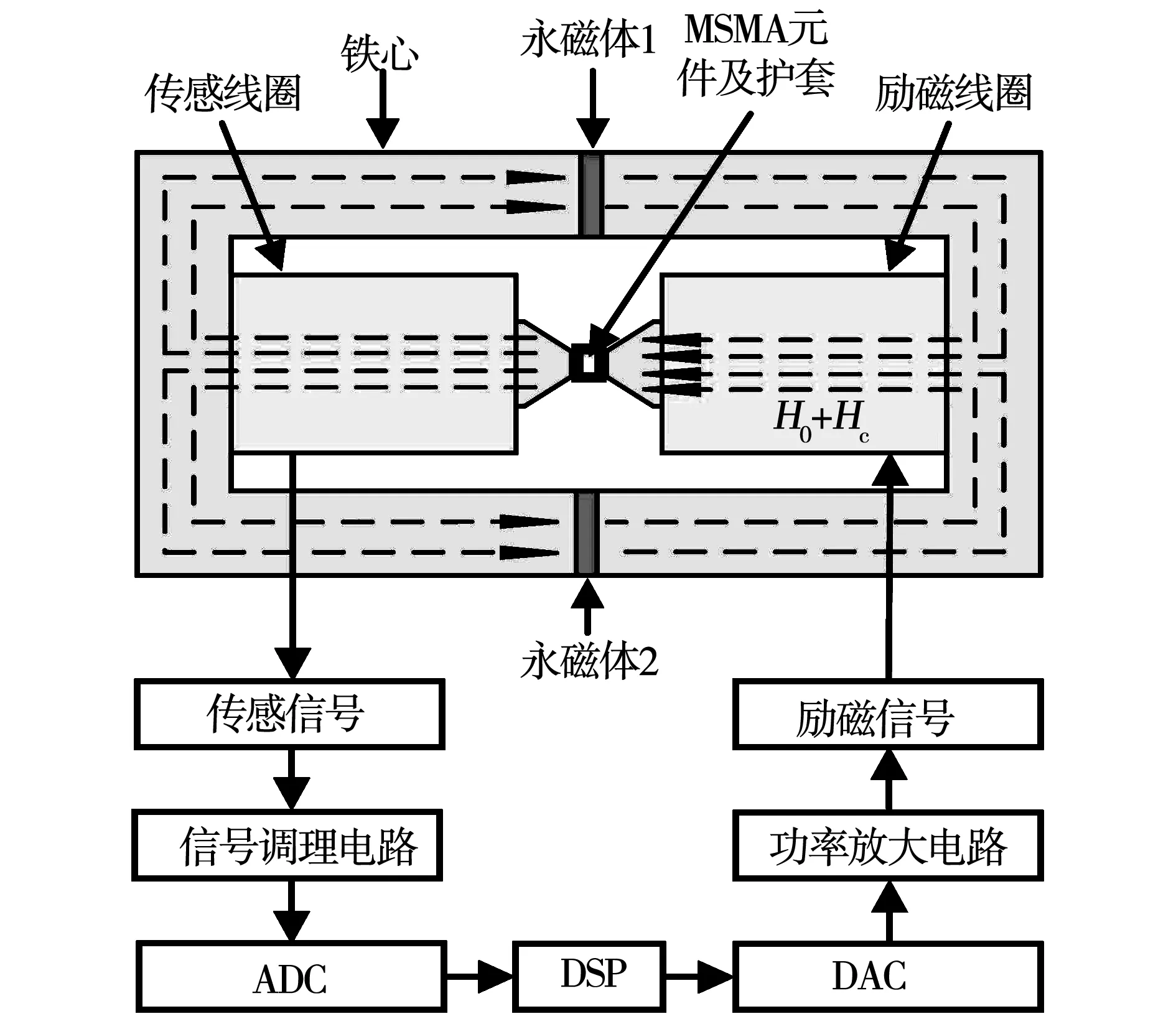
图1 MSMA自感知执行器工作原理图Fig.1 Functional principle of self-activating MSMA
MSMA自感知执行器实验平台结构示意图及实物分别如图2~图4所示。

图2 实验平台结构示意图Fig.2 Schematic diagram of experimental platform
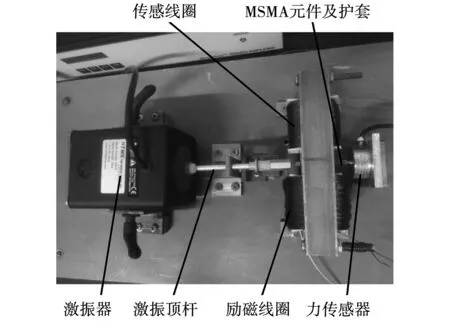
图3 MSMA自感知执行器实验平台俯视图照片Fig.3 Top view photo of MSMA self-sensing actuator experimental platform

图4 MSMA自感知执行器实验平台侧视图照片Fig.4 Side view photo of MSMA self-sensing actuator experimental platform
激振器提供的激振力施加在自感知执行器上,其变化规律和大小可由信号发生器及功率放大器改变;力传感器用于测量施加在MSMA元件上的预压力及激振力大小,调整螺栓的位置可改变施加在MSMA上的预压力;激振顶杆与45#钢制成的挡板固定在一起。当激振力作用于MSMA元件时,采用非接触式涡流传感器测量MSMA元件的位移。
2 MSMA自感知执行器结构设计
MSMA自感知执行器铁心磁路由偏置磁场与控制磁场合成。在MSMA元件两侧的铁心采用楔形结构,该结构对磁场有聚磁作用,可为MSMA元件提供较强且均匀分布的磁场。
2.1 铁心等效磁路
由硅钢片叠制的MSMA自感知执行器铁心,相对空气及永磁体,有着更大的磁导率,因此磁路中铁心的磁阻可以忽略不计,整个磁路中的磁阻分布于2块永磁体与楔形气隙处。
使用等效磁路法对铁心磁路进行理论分析[15],磁路中等效磁阻的计算方法与电路中等效电阻的方法相似,通过图1可知2块永磁体的磁阻在磁路中属于并联联接,再与楔形气隙的磁阻串联。文献[16]的MSMA传感器铁心结构同样使用2块永磁体提供偏置磁场,但该结构中的永磁体与气隙处于同一磁路,三者属于串联方式,因此总磁阻较大,励磁线圈提供相同的磁场所需功率则更大。本文设计的自感知执行器铁心结构,永磁体采用并联方式放置于铁心中,能够在产生磁通不变的情况下,减小磁路的总磁阻和励磁线圈的功率。
忽略漏磁对磁路磁通的影响,MSMA自感知执行器铁心的等效磁路如图5所示。其中,Fc=NIc为励磁线圈产生的磁动势,N为励磁线圈匝数,Ic为励磁电流;RG为气隙处的磁阻;RM为对称分布的永磁体产生的磁阻;Φc为磁路中的总磁通,Φ1和Φ2分别为通过铁心上下2部分磁路的磁通,且Φc=Φ1+Φ2。

图5 MSMA自感知执行器铁心等效磁路Fig.5 Core equivalent magnetic circuit of MSMA self-sensing actuator
由磁路欧姆定律可得铁心磁路中由励磁线圈产生的磁通为
(1)
式中:Fc为励磁线圈的磁动势,A;Rs为铁心磁路中的总磁阻,A/Wb。
总磁阻为
(2)
磁路中的磁阻为
(3)
式中:l为磁路长度,m;μ0为真空磁导率,4π×10-7H/m;μr为磁路材料相对磁导率;A为磁路的导磁面积,m2。
由式(1)可以得到励磁线圈产生的磁通Φc,则相应的磁通密度为
(4)
式中Sg为气隙截面积,与MSMA元件截面积相同。
Bc与Hc的关系为
Bc=μ0μrHc。
(5)
可得励磁线圈在气隙处产生控制磁场Hc为
(6)
2.2 有限元分析
在MSMA自感知执行器的磁路中,铁心中的漏磁以及励磁线圈缠绕分布不均等情况均会对气隙处的磁场产生影响,等效磁路法难以得到复杂情况下的实际磁场。因此,在使用等效磁路法进行理论分析的基础上,使用Ansoft Maxwell软件对铁心磁路进行有限元仿真分析[17-18]。
图6为自感知执行器铁心的网格剖分情况。将一个剖分体记作一个计算单元,在具有规则几何尺寸的铁心部分,因其磁场变化较小,则剖分单元大;而在气隙和永磁体的剖分处由于磁场变化较大,剖分单元则较小,虽然该部分的导磁长度相对铁心较小,但其磁导率远小于铁心,从而使磁场变化幅度增大。

图6 铁心网格剖分图Fig.6 Core mesh generation
图7为自感知执行器铁心的磁通密度矢量分布图。磁场由永磁体和励磁线圈共同提供,永磁体提供的磁通密度在气隙处可达0.26 T,当励磁线圈的磁动势Fc=1 700 A时,气隙处的磁通密度能够达到0.6 T。励磁线圈产生的控制磁场和偏置磁场进行叠加后磁通密度变化范围为0.26~0.6 T,在该范围内MSMA元件可输出较大的应变和应力。

图7 铁心磁通密度矢量分布图Fig.7 Vector distribution of core flux density
3 传感信号滤波处理
MSMA自感知执行器在传感阶段产生的感应信号易受到外部环境的干扰,并且干扰源随时间会发生变化。使用普通数字滤波器只能滤除特定频段的干扰信号,不能对多频段变化的传感信号滤波。为了处理传感信号,采用基于LMS算法的自适应滤波处理器,随着实验外部环境的变化,滤波器可以及时的更新滤波系数,从而对频率不断改变的信号噪声进行处理。
3.1 LMS自适应滤波器
图8是LMS自适应滤波器原理图。x[n],y[n]分别为输入以及输出信号,滤波器的系数向量序列为ω[n],参考信号(期望信号)为d[n],误差信号为e[n]。该滤波器以d[n]和x[n]的统计特性为基础,可以自行对系数进行更新,从而在最小均方误差准则满足时,e[n]取得最小值[19]。

图8 LMS自适应滤波器Fig.8 Adaptive filter in the LMS
LMS算法的自适应滤波器采用横向FIR结构,如图9所示。该结构的滤波器对其系数量化误差具有很强的容错性,适合应用于实时嵌入式系统中。

图9 横向FIR滤波器结构Fig.9 Structure of transverse FIR filter
L是滤波器的阶数,x[n]=[x[n],x[n-1],…,x[n-L+1]]T是输入信号的向量序列,ω[n]=[ω0[n],ω1[n],…,ωL-1[n]]T是滤波器系数向量序列。
由结构图可知,y[n]由x[n]与ω[n]两个序列向量的卷积运算得到,可表示为
(7)
则误差信号为
e[n]=d[n]-y[n]=d[n]-ωT[n]x[n]。
(8)
均方误差为
ε[n]=E[|e2[n]|]=
E[(d[n]-y[n])2]=
E[|d2[n]|]+ωT[n]Rω[n]-
2ωT[n]p。
(9)
式中R是L×L阶的自相关矩阵,定义为
R=E[x[n]xT[n]]=
(10)
矩阵中的元素rx[k],是由E[x[n]x[n-k]]定义的自相关函数。
式(9)中的p向量为
p=E[d[n]x[n]]=
[rdx[0],rdx[1],…,rdx[L-1]]T。
(11)
d[n]和x[n]表示p的相关性,同理,E[d[n]x[n-k]]定义rdx[k]为互相关函数。
令式(9)的偏微分方程为0,可求出ε的最小值对应的极点ω0[n]为
(12)
式(12)是1个线性方程组,R是Hermit矩阵,正常情况下是可逆的,因此作为最优解的ω0[n]是存在的。将ω0[n]代入式(9)得到ε[n]的最小值为
(13)
为了得到ε[n]的最小值,用一个开口向上且每一个值都是正的抛物线代替ε[n]的计算公式,ε[n]的值随着滤波系数的不断改变而逐渐趋于其最小值。按照最陡下降法的原理,沿正梯度方向的ε[n]增长速度是最快的,减小最快的则是沿负梯度方向。根据该原理,滤波器的系数更新可表示为
ω[n+1]=ω[n]-μ▽ωε[n]。
(14)
式中,收敛因子(步长因子)μ对自适应算法的收敛速度和稳定性十分重要,▽ωε[n]为均方误差梯度。
若直接使用(9)定义的ε[n],则需要在进行大量运算之后才能得到ε[n]的值,使滤波失去了实时性。利用e[n]的瞬时值作为均方误差估计值的LMS算法,大量减少了计算所需的时间。
综上得到优化后的滤波器系数更新公式为:
(15)
ω[n+1]=ω[n]+2μe[n]x[n]。
(16)
为了使滤波程序的运算效率得到提升,对算法程序进行编写时,将公式中的2μ替换为μ,以标量形式对(16)进行表示为
ωi[n+1]=ωi[n]+μe[n]x[n-i]。
(17)
式中i的取值范围为[0,L-1]。
3.2 滤波结果
滤波器的阶数L设置为32,收敛因子μ设置为0.005。滤波器的稳定性和收敛速度由μ的大小决定,μ值较大时,滤波器收敛速度是比较快的,但是滤波器的稳定性会受到影响,从而降低了滤波效果;当其值较小时,滤波器的稳定性和滤波效果虽然能够得到提升,但由于收敛速度较慢,当信号频繁变化时,实时性较差。
实验中将含干扰噪声的传感信号作为d[n],其中包含传感信号和干扰噪声。激振器的输入信号作为x[n]。传感信号准确的频率信息包含于激振器的输入信号中,输入信号在线性滤波后,不会改变其频率信息。在滤波器系数收敛后,滤波器的输出信号y[n]是准确的传感信号,d[n]与其差值最小,即此时e[n]的值因为y[n]与d[n]中包含的传感信号相抵消而最小,从而得出此时的e[n]为干扰信号。
实验中对自感知执行器施加幅值为1 N,频率为80 Hz的激振力,得到滤波前后的信号对比情况如图10所示。图中A为施加激振力的波形,B、C分别为滤波前后的传感信号波形。由文献[9]可知,传感信号应与施加在MSMA元件上的激振力有相同的变化规律,但在本文研究中,因干扰信号的存在,致使传感信号发生畸变。通过自适应滤波后,干扰信号得到有效滤除。

图10 LMS自适应滤波曲线Fig.10 Curve of LMS adaptive filtering result
4 信号解耦
由于传感线圈与励磁线圈处于同一磁路中,当励磁线圈施加控制信号后,产生的控制磁场会对传感信号产生干扰,因此,对传感信号与控制信号解耦方法的研究是MSMA自感知执行器需要解决的关键问题。
4.1 MSMA自感知执行器信号解耦
文献[14]提出时分复用的方法,其基本原理如图11所示。该方法将压电自感知执行器的1个传感执行周期T分为传感、执行和放电时隙3部分,分别为图中的τ1、τ2、τ3,使用对应的3路时序脉冲电压U1、U2、U3,控制切换3个通道,实现传感与控制信号的解耦。
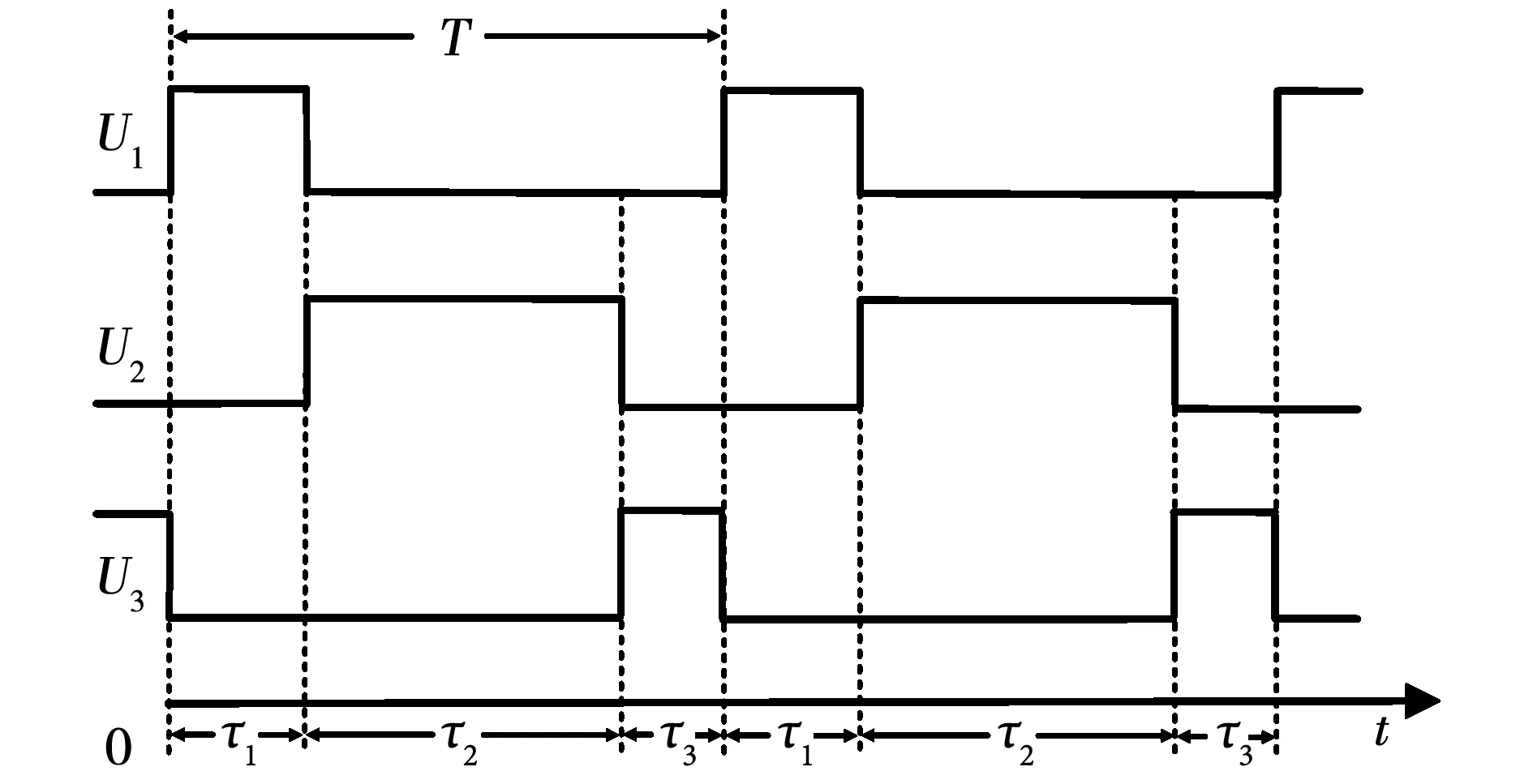
图11 时序控制原理图Fig.11 Principle of timing control
控制时序配置和开关器件的选择是实现传感信号和控制信号解耦的关键性问题。MSMA自感知执行器的传感信号和控制信号两者电压相差较大。正常情况下,0~300 mV是自感知执行器在传感阶段输出感应信号的幅值范围,而实验中施加的控制信号范围为10~20 V,所以要分别选择不同器件用于传感和控制通道的开关中。
根据控制信号和传感信号的幅值范围,传感通道的开关选用适于小信号的接通和断开的四通道双向模拟开关芯片CD4066。控制通道的开关选用电压在6~24 V之间的TWH8778。开关电路原理如图12所示。励磁线圈的两端并联续流电路[20],选用快速恢复二极管FR107,串联阻值为10 kΩ的Rf。当开关TWH8778断开后,励磁线圈与其构成回路,线圈放电。因此本实验在完成传感、执行和放电过程的依次切换时,只需要在时序控制电压U2与下一周期的U1之间设置合适的死区,而不需要额外的开关器件控制线圈放电。

图12 开关电路原理Fig.12 Principle of switch circuit
对于控制时序的配置,即为传感、执行和放电时序所占1个周期的百分比。为了使得自感知执行器能够输出较大的力,其控制磁场应持续一定的时间,因此执行时序应在1个周期内占足够大的比例。而放电时序应尽可能的短,从而为传感时隙中的信号采集、滤波及控制信号的维持提供充足的时间。
在施加控制信号后,因为励磁线圈是感性负载,其电流滞后于电压。在断开励磁电压后,线圈中的电流方向不会改变,电流仍会在较长一段时间内存在,过长的放电时间会使下一周期传感过程的信号检测受到影响。对于感性负载,电路的时间常数τ=L/Rf决定其放电时间,线圈充电过程可表示为
(18)
放电过程为
(19)
式中Ic为励磁线圈中最终稳定时的电流。
通过式(18)和式(19)得知,当励磁线圈上控制电压信号通断切换时,线圈电流是逐渐改变的,所以要适当增加Rf阻值,减小励磁线圈续流回路的时间常数τ,进而能够减少放电时隙的时间,消除对传感过程的影响。有无电阻Rf时,线圈放电效果对比示意如图13所示。可以发现,线圈放电过程会在没有电阻Rf时变长,从而会影响传感时隙,放电时间会因接入电阻Rf后大幅减小,使执行时隙在同一周期中占据更长的时间比例,进而提高控制效果。

图13 电阻Rf对励磁线圈放电电流的影响Fig.13 Influence of resistance Rf on release current of the excitation coil
4.2 实验结果
图14是自感知执行器执行与传感信号的解耦实验结果。
图14(a)是通过时分控制方法得到的传感信号和控制信号波形,MSMA受力形变的过程由传感信号的正半周期对应,MSMA在偏置磁场下恢复形变的过程对应传感信号的负半周期,所以只在传感信号正半周期时施加控制信号。图14(b)为波形的局部放大,1个完整的传感执行周期为600 μs。其中,传感时隙配置为20 μs,执行时隙配置为480 μs,放电时隙配置为100 μs。可以看到控制信号与传感信号互不影响,由时分控制方法实现2个信号之间的解耦。
5 结 论
基于MSMA的可逆特性及自感知执行器的工作原理,本文开展MSMA自感知执行器应用的相关研究。利用等效磁路法与有限元方法分析自感知执行器的铁心磁路,设计结构合理的MSMA自感知执行器。对于含有噪声且频率不同的自感知执行器传感信号,采用LMS自适应滤波器进行处理,有效提取独立于致动信号的传感信号。基于时分控制、传感信号和控制信号的特点,设计合理的开关电路,实现控制信号与传感信号的时序控制和解耦。
MSMA自感知执行器发出控制指令至执行磁场建立所需时间较长,会影响执行器的工作频率。在后续研究工作中,应寻求更加完善的控制策略缩短其执行时间。