船舶直流微电网非线性积分均流控制
2021-06-10庄绪州刘彦呈张勤进陈再发郑祥鲁
庄绪州, 刘彦呈, 张勤进, 陈再发, 郑祥鲁
(大连海事大学 轮机工程学院,辽宁 大连 116026)
0 引 言
船舶作为温室气体CO2的重要来源之一,一直以来备受各国政府关注。国际海事组织(international maritime organization, IMO)已经制定减少温室气体排放的法律法规,要求船舶的温室气体排放量在2050年前减少到2008年的50%,并在2100年前实现零排放[1-2]。因为氢燃料电池的排放物以水蒸气为主不存在温室气体CO2,基于氢燃料燃料电池的船舶直流微电网技术在航运业备受关注。
相较于船舶交流微电网,船舶直流微电网的优势主要体现在以下几方面[3-5]:1)光伏电池、储能电池及燃料电池等常见分布式电源均流直流电制,风力发电和透平发电机也可以通过简单整流变为直流电,采用直流电网结构更便于多种能源的灵活接入;2)在直流微电网中没有谐波和三相不平衡问题,提高了电网电能质量和系统可靠性;3)直流微电网中不会产生无功功率,提高了发配电装置的利用率;4)结构紧凑的电力电子变换器取代了笨重的大型工频变压器,同时还减少了大量开关柜,有效降低了系统体积及重量;5)直流微电网中也没有同步问题,便于集成高速和变频发电机,提高发电机功率密度和燃油机效率;6)与交流电网中发电机并车需要同时满足电压、频率和相位要求不同,直流微电网中并车仅需满足电压要求;7)船舶变频驱动装置需要直流供电,采用直流电网结构将省去 AC/DC 整流环节,降低变频器体积及能量损耗;8)与交流电网相比,直流电网在接入脉冲型电力负载时更加稳定可靠。尽管船舶直流微电网的诸多优势十分明显,但直流开断技术、直流变压器远没有交流成熟,ABB公司(Asea Brown Boveri Ltd.)的平台供应船Dina Star、西门子公司的电动渡轮Ampere,及E-MS(E-powered marine solutions)公司的维京游轮均在直流发配电技术方面进行了探索,其中电力电子化多源多负荷系统的并联均流控制问题就是热点研究问题之一。
直流微电网中,变换器存在参数不确定性及线路电阻不同,导致负载功率在变换器间分配不均,会产生可靠性及稳定性的问题[6]。首先,输出电流较大的变换器会增加功率器件温度应力,容易产生设备损坏;其次,某些变换器会率先引起电流保护及模式切换混乱,影响系统的正常运行。直流微电网变换器的并联控制问题是研究多变换器的直流母线电压调节和功率分配问题[7-21]。基于下垂控制的分布式策略是目前普遍实现变换器即插即用最有效的策略,但也存在负载分配不均和母线电压偏差较大的问题。下垂控制旨在利用虚拟阻抗调整变换器的外特性曲线,达到变换器按比例分配负载电流的目的[7-8]。然而虚拟阻抗也会造成较大的直流母线电压偏差,存在难以同时提高均流和直流母线电压精度的矛盾[9-10]。文献[9]针对下垂控制动态过程均流效果差的问题,利用具有阻性和感性的复合阻抗同时提升稳态下的功率分配和动态性能。文献[10-11]均通过阻抗测量策略实现线路阻抗补偿,提高变换器并联均流精度。文献[12]提出了一种自适应垂控制方法,根据负载大小自动调整下垂系数,进一步提高变换器间的电流分配精度。文献[13]针对系统参数不确定性和负载扰动,提出了模糊滑模控制策略实现精确的电流分配。
为了恢复下垂控制引起的母线电压跌落,文献[14]利用独立的母线电压控制器改变变换器的外特性曲线,减小母线电压偏差。该方法过度依赖单一设备的可靠性。文献[15]利用集中通信在变换器实现电压和电流共享,利用电压平均值统一补偿母线电压,利用电流平均值提高均流精度。该方法需要在变换器间通信共享输出电压和电流信息,通信压力较大。文献[16-18]利用稀疏通信仅在相邻变换器间交换信息,通过一致性均流算法观测出全局的电压和电流平均值,进行二次调压并提高均流精度。该方法简化了通讯结构,但依然需要在变换器间交换电压和电流。文献[19]将电力线作为通信媒介实现微源的协同控制,但由于采用高频信号传递信息,极易受到干扰影响。文献[6,20-21]通过在直流电压中叠加交流小电压信号,实现了频率-电流下垂控制,有效解决了变换器的功率分配问题。虽然该方法可以实现无通讯的均流控制,然而引入交流电压会导致输出电压纹波变大。

1 船舶直流微电网
1.1 氢-储混合动力船舶直流微电网结构
氢-储混合动力船舶直流微电网主要由燃料电池组、储能电池组、推进电机及接口变换器构成,结构如图1所示。由于船舶工况多变,船舶加速或减速时推进装置的电流会发生突变,而燃料电池的响应时间长,跟不上负载的变化速度,导致燃料电池缺气现象,因此需要储能电池来维持燃料电池和推进装置的功率平衡。利用单向DC-DC变换器将燃料电池接入直流母线,以电流源的方式提供续航电能。通过双向DC-DC变换器将储能电池接入直流母线,以电压源的方式维持母线电压的稳定和网内动态功率平衡。燃料电池和动力电池组成的混合动力系统即提高了船舶布局的灵活性和船舶供电的可靠性,又能增加系统冗余,但也增加了系统的控制难度。由于推进装置的DC/AC逆变器需要稳定的输入电压,而燃料电池单元没有母线电压调节能力,因此多储能单元间的负载分配控制和电压稳定尤其重要。

图1 基于混合动力的船舶直流微电网Fig.1 Marine DC microgrid based on hybrid energy
船舶电网作为海洋上移动的孤立电网,其可靠性关系到众多航行设备的正常工作和航行安全。相比陆上电网,海上的天气情况更加复杂多变,风浪流造成船舶横摇和纵摇,引起设备晃动,更容易导致通信接口接触不良。船舶机舱高温、高湿及高盐的环境也会造成芯片引脚短接等问题。船舶特殊工作环境对储能单元间的负载分配控制和电压稳定控制提出了更高的可靠性要求。
1.2 船舶直流微电网储能单元的二次控制分析
图2是船舶直流微电网储能系统的结构和二次控制算法。根据文献[9]和文献[22]可知,在下垂控制下变换器间输出电流的比值为

图2 船舶直流微电网储能系统及二次控制Fig.2 Energy storage system and secondary control in marine DC microgrid
(1)
其中:ioj和iok是第j个变换器和第k个变换器的输出电流;rj和rk是第j个变换器和第k个变换器的线路阻抗;Rdj和Rdk是第j个变换器和第k个变换器的下垂系数。
当Rdj≫rj且Rdk≫rk时,输出电流的比值与下垂系数成反比。由式(1)可知下垂系数越大,变换器间功率分配的精度越高,但也会增加母线电压跌落。V-I下垂控制存在难以同时提高母线电压和负载分配精度的矛盾,国内外学者相继提出了二次调压和二次均流控制。
分布式二次控制器包括二次电压调节和二次电流调节,通过低带宽通信(low bandwidth communication,LBC)共享变换器的输出电压和输出电流,并求出电压和电流的平均值作为二次控制器反馈,提高母线电压和均流的精度。二次电压调节和二次电流调节补偿值分别为:
(2)
(3)
补偿后输出电压变为
vok=V*+δv+δi-Rdkiok。
(4)
船舶在离靠港、巡航、恶劣天气航行及航行维修的情况下对供电有不同需求,因此要求DC-DC变换器能更加便捷地并离网;同时还要求在DC-DC变换器发生通信故障或机械故障时,电网供电安全可靠。在DC-DC变换器并离网时,分布式二次控制中平均电压vavg和平均电流iavg中变换器个数n需要人为修改设定。在变换器故障时,n不能自适应的减小,造成所求均值过小,会造成二次控制输出过大,进而导致DC-DC变换器输出过压,威胁负载设备的用电安全。因此,除了增加冗余通信网络外,还需在均流控制算法中提高DC-DC变换器的并离网性能和通信容错能力,增加了控制算法复杂性。
2 基于虚拟交流电压的均流控制方法
2.1 交流微电网下垂控制
交流微电网中具有电压和频率两个可控变量,且频率具有全局一致性,因此通过调频即可实现并联逆变器的有功功率分配。
图3为交流微电网逆变器的等效模型,根据基尔霍夫定律,负载电压为

图3 交流微电网Fig.3 Droop control in AC power system
(5)
其中:Ek是第k个逆变器的电压有效值;UL是负载的电压有效值;φk是第k个逆变器的电压相位;φ0是负载的电压相位。
以及逆变器k的输出电流为
(6)
根据文献[23],逆变器k的有功功率和无功功率分别为:
(7)
与DC-DC变换器类似,在控制带宽内逆变器的电压幅值和频率都要严格无静差地跟随给定值。在此基础上,交流微电网的下垂控制表示为:
(8)
其中:ωk是逆变器k的角频率;kp和kq是下垂系数;ω0是额定角频率;E0是额定电压有效值;P0和Q0是额定有功功率和无功功率。
逆变器间有功功率的分配比值为
(9)
由于交流电网中各处频率相等,保证了逆变器间能够严格按照下垂系数的反比分配有功功率。
2.2 虚拟交流电压信号
直流微电网仅存在电压一个可控变量,DC-DC变换器间的功率分配通过V-I下垂控制实现。然而,由于线路阻抗的影响,直流微电网内各变换器的电压均存在差异,造成V-I下垂精度较低。V-I下垂控制的母线电压还存在一定的偏差。
直流微电网中缺少全局一致的变量,限制了DC-DC变换器间均流精度的进一步提高。为了解决上述问题,模拟逆变器的下垂特性提出了基于虚拟交流电压的直流微电网DC-DC变换器均流控制策略,如控制图4所示。该策略包括虚拟交流电压发生器、虚拟无功功率计算器、无功补偿器和虚拟负阻抗补偿器。虚拟交流电压发生器构造出一个频率与直流电流成正比的虚拟交流电压。虚拟功率计算器利用傅立叶变换计算基频交流电压产生的无功功率。无功功率补偿器通过平移DC-DC变换器的外特性曲线,实现变换器之间的均流控制。虚拟负阻抗补偿器利用负阻抗进一步补偿母线电压跌落。变换器的虚拟交流电压通过低带宽通信实现网内共享。为了恢复完整的交流电压信号,每个周期至少需要共享10个点的电压,因此交流电压的频率不超过通信频率的十分之一。

图4 基于虚拟交流电压的DC-DC变换器并联均流策略Fig.4 Current sharing strategy of DC-DC converter based on virtual AC voltage
根据逆变器的下垂特性,构造虚拟频率为
fvk=f*-dfkiok。
(10)
其中:f*(不失一般性,选择50 Hz)为虚拟频率的额定值;dfk表示变换器k的电流-频率下垂系数。
虚拟交流电压相角为
(11)
进一步得到虚拟交流电压
(12)
其中A为虚拟交流电压的有效值。
因为输出电流的大小不同,每个变换器的虚电压频率也不相等,不能作为全局变量。在DC-DC变换器间利用低带宽通信共享虚拟交流电压。根据式(5),令Zk=1+0j 且Zload=∞+∞j,构造出公共虚拟交流电压
(13)
根据式(6),构造虚拟交流电流
(14)
2.3 虚拟无功补偿
在直流微电网中,DC-DC变换器的输出电流由输出电压、母线电压和线路电阻共同决定,即
(15)
虚拟频率中包含了变换器输出电流的信息,单不能直接调整变换器的输出电压,因此虚拟交流电压不能直接调控输出电流。要实现均流控制,需要构造一个与虚拟频率相关的中间变量来调节输出电压。在图3的交流微网中无功功率可以用来调节逆变器电压,类似地可以构造虚拟无功功率来调节DC-DC变换器的电压。
利用傅里叶变换求出虚拟交流电流的幅值和相位角,进而计算无功功率。虚电流的傅里叶级数为
(16)
其中:ω=2πf*是角频率;an和bn是n次谐波余弦分量和正选分量的幅值。
基波的余弦分量和正弦分量幅值分别为:
(17)
其中T=1/f*是基波周期。
由式(17)求出虚拟交流电流的基波有效值和相位分别为:
(18)
虚拟交流电压的基波相位和有效值可以通过式(12)直接求出,即
(19)
进而虚拟无功功率为
(20)
利用构造的虚拟无功,调节DC-DC变换器输出电压,即可实现均流控制
vok=V*-dqQvkClp(s)T(s)。
(21)
其中:dq是无功-电压下垂系数;Clp(s)是一阶低通滤波器;T(s) 是DC-DC变换器的闭环传递函数。低通滤波器用来提高系统满足稳定性。
2.4 虚拟负阻抗补偿
船舶直流微电网中,母线电压是由所有DC-DC变换器的电压、电流以及线路电阻共同作用决定的,即
(22)
无功补偿后的母线电压为
(23)
式中的无功功率和为0,故由无功功率引起的压降为0,但经无功补偿后母线电压中尚存在线路阻抗引起的压降。
为了进一步抵消线路阻抗引起的母线电压偏差,提出虚拟负阻抗补偿。利用虚拟负阻抗产生等于线路电阻压降均值的补偿量。变换器输出电压和母线电压分别为:
vok=V*-dqQvkClp(s)T(s)-rvdfkiokClpi(s);
(24)
(25)

由于线路阻抗检测比较繁琐且很难保证精度,直接测量线路阻抗来计算虚拟负阻抗不太实际。本文采用在负阻抗补偿前测量直流母线电压和任意一个变换器的输出电流的方法来计算虚拟负阻抗的大小为
(26)
3 稳定性和通信容错能力分析
3.1 非线性积分及右半平面极点校正
根据式(7)和式(11),DC-DC变换器的虚拟无功功率等于
(27)
其中fc为公共虚拟交流电压的频率。
联立式(10)、式(15)、式(24)和式(27)可以变换为
fvk=
(28)
其中kf=dfkdqA2为控制增益。
由式(28)可画出系统控制框图,如图5所示。公共虚拟交流电压的频率fc为系统给定,变换器虚拟交流电压频率fvk作为输出变量,V*-vpcc为系统扰动。

图5 虚拟频率控制框图Fig.5 Virtual frequency control block diagram
由式(28)和控制框图可以得出,基于虚拟交流电压的均流控制是对误差积分取Sin值,实现的非线性积分控制。为了分析系统的稳定性,对Sin函数进行泰勒级数展开并忽略高次项,求得虚拟频率的开环传递函数
(29)
由于DC-DC变换器闭环传递函数T(s)近似为一阶低通滤波器,并且带宽远大于Clp(s),可通过小时间常数近似将两个环节等效为一个一阶低通滤波器。虚拟频率的开环传递函数变为
(30)
其中:τΣ是低通滤波器Clp(s)和闭环传递函数T(s)的时间常数之和;ωi为低通滤波器Clpi(s)的截止频率。由于虚拟负阻抗rv大小等于线路阻抗加权平均再取负数,造成部分变换器中开环极点s=(rk+rv)×ωi/rk出现在右半平面,引起系统不稳定。
虚拟频率的闭环传递函数为
(31)
其中:a=τΣrk;b=rk+(rk+rvdfk)ωiτΣ;c=2πkf+(rk+rvdfk)ωi;d=2πkfωi。
由于通信延迟会造成系统相位滞后,影响系统稳定性。假设各变换器间的通信延迟一致,则考虑通信延迟情况下:
(32)
将eτc s通信延迟环节按泰勒级数展开得到
(33)
由于τc很小,可以取eτc s前两项近似,得到
(34)
考虑通信延迟的虚拟频率闭环传递函数变为
(35)
其中:a′=τca;b′=τcb+a;c′=τc(c-2πkf)+b;d′=c;d=d。
为了验证非线性积分控制的动态响应性能和稳定性,以Boost变换器为例,图6(a)、(b)、(c)分别给出了闭环传递函数Wcl(s)的极点随增益kf、时间常数τΣ及低通滤波器带宽ωi变化的根轨迹图,参数如表1所示。

表1 Boost变换器的参数

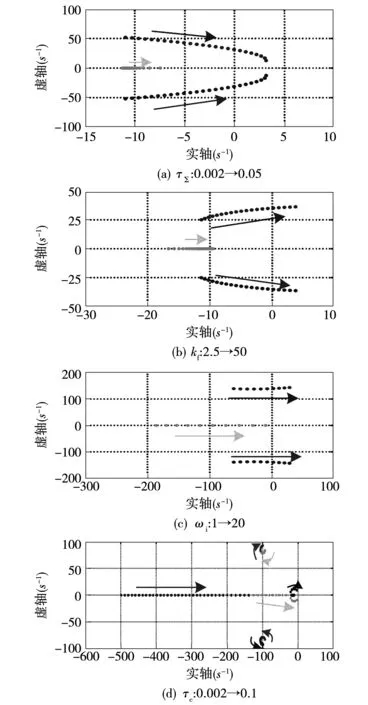
图6 虚拟频率闭环传递函数根轨迹Fig.6 Root locus of virtual frequency closed-loop transfer function
式(31)所示的系统为在低频时增益趋近于1,保证了系统不存在稳态静差,虚拟频率fk对公共虚拟频率fc具有良好的跟随性能。因此,稳态下变换器的输出电流分配比始终保持为
(36)
3.2 通信容错能力分析
尽管所提控制方法减少了通信数据量,但非线性积分控制的有效性仍取决于通信网络的可靠性,因此有必要分析通讯故障对控制策略的影响。为了便于计算,以2个变换器并联的情况为例进行分析。
当变换器1的数据接收功能故障但数据发送功能正常时,变频器1计算出的公共虚拟交流电压和虚拟交流电流为:
(37)
由于虚拟交流电压和虚拟交流电流的相角一致,在变换器1中不产生虚拟无功功率。
变频器2中计算出的公共虚拟交流电压和虚拟交流电流为:
(38)
其中fc2=(fv1+fv2)/2且δc2=(δv1+δv2)/2。

当变换器1的数据接收功能正常但数据发送功能故障时,与第一种情况相似,两种变换器的电流仍然成比例分配。根据以上分析,当存在数据接收故障或数据发送故障时,该方法仍然有效。只有变换器k的数据接收和发送功能均失效时,变换器k的均流策略才失效,但不影响其他变换器正常工作。
4 仿真案例分析
为了验证非线性积分控制的有效性,利用MATLAB/simulink对二次控制和非线性积分控制进行了对比分析。在不失一般性的前提下,DC-DC变换器的拓扑结构采用Boost电路。在仿真案例1中,分析了二次控制的负载电流分配精度和电压调节性能。在仿真实例2中,分析了非线性积分控制的负载电流分配精度和电压调节性能。
4.1 案例1:基于V-I下垂的二次控制
该仿真实验以4个boost变换器并联的系统为例,分析二次控制在负载突变及变换器自动离网情况下的控制性能,控制结构如图2所示。4个变换器的容量比值为2∶2∶1∶1,控制参数中除了V-I下垂系数(Rd1=Rd2=4,Rd3=Rd4=8)和线路电阻(r1=1 Ω,r2=0.5 Ω,r3=1.5 Ω,r4=0.75 Ω)外其他参数均保持一致,见表1。二次电压控制器为1+100/s,二次电流控制器为5+300/s,通信频率为2 ms一次,仿真结果如图7所示。在初始状态下,只进行V-I下垂控制,直流微电网负载Rload=16.6 Ω;在t=1 s时,激活二次控制;在t=2 s时,负载突变为25 Ω;在t=3 s时,4#变换器因故障自动离网。只采用下垂控制情况下,#1-#4变换器的稳态电流不能严格按2∶2∶1∶1的比例分配,存在电流误差,母线电压也存在较大的跌落。启动二次控制后,#1-#4变换器的稳态电流严格按2∶2∶1∶1的比例分配,母线电压也迅速回升,但仍存在线路阻抗产生的压降。负载突变时,均流静态误差小和动态性能良好。然而当4#变换器发生故障自动离网时,母线电压突增为735 V。上述仿真分析可以发现,二次控制稳态和动态均流精度高,但在变换器故障离网情况下控制性能存有欠缺,需要增加网络冗余和均值计算的自适应算法,均增加了系统的复杂性。

图7 所提控制策略的调压和均流性能Fig.7 Voltage regulation and current sharing performance of the proposed control strategy
4.2 案例2:基于非线性积分的均流控制
该仿真实验以4个boost变换器并联的系统为例,验证了基于虚拟交流电压的非线性积分控制。4个变换器的控制参数中除了I-f下垂系数(df1=df2=0.15,df3=df4=0.3)和线路电阻(r1=1 Ω,r2=0.5 Ω,r3=1.5 Ω,r4=0.75 Ω)外其他参数均保持一致,通信频率为2 ms一次,见表1。
图8为所提出控制方法的仿真结果。在初始状态下,只进行无功补偿,直流微电网负载Rload=16.6 Ω;在t=1 s时,负载突变为25 Ω;在t=2 s时,4#变换器因故障自动离网;在t=3 s时,3#变换器通讯数据发送故障。发生故障前,#1-#4变换器的稳态电流始终严格按2∶2∶1∶1的比例分配,母线电压为700 V。当4#变换器发生故障自动离网时,母线电压仅产生微小的电压跌落,#1-#3变换器的虚拟电压幅值降低为7.5 V,但从图8(d)可以看出3个变换器的虚拟频率依然保持一致,保证了变换器的均流精度。3#变换器通讯数据接收故障后,3#变换器中计算出的公共虚电压幅值降低到2.5 V,但 #1-#3变换器虚拟频率依然保持一致,稳态电流依然严格按2∶2∶1的比例分配,母线电压偏差也较小。与二次控制相比,所提方法虽然在存在动态均流误差大和调节速度慢的问题,但提高了变换器在故障情况下的可靠性。

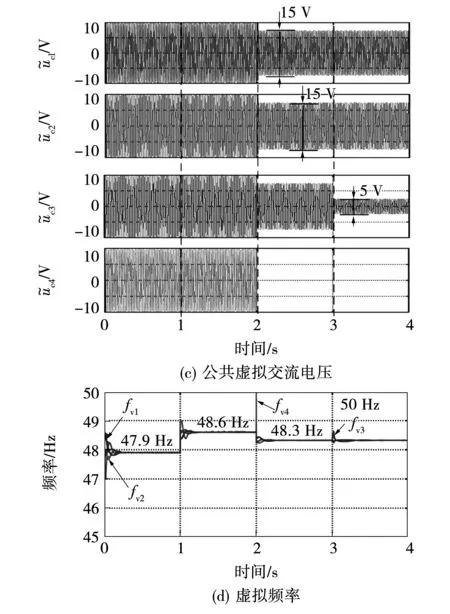
图8 通信故障下所提控制策略的性能Fig.8 Performance of the proposed control strategy in case of communication failure
5 实验验证
为了进一步验证非线性积分控制的有效性,搭建了基于dSPACE的实验平台,包括电池、Boost变换器、直流负载和dSPACE控制器,如图9(a)所示。实验拓扑如图9(b)所示。实验1研究了该方法的均流性能,实验2研究了通讯故障对该方法的影响,变换器和控制器的具体参数见表2,通信采用dSPACE控制器自带的485通信和零阶保持器的方式模拟低带宽通信,2 ms通信一次,并设置最大2 ms的延时。

表2 变换器和控制器的实验参数

图9 实验平台及拓扑Fig.9 Experimental platform and topology
5.1 实验1:所提控制策略的均流实验
在本实验中,分析了2个相同容量的DC-DC变换器在所提出的控制方法下的均流性能。在初始状态下,负载大小为Rload=80 Ω。图10(a)示出了虚拟无功补偿前后DC-DC变换器的输出电压和电流。不采用非线性积分控制之前,DC-DC变换器的输出电压维持在额定值150 V,变换器1和变换器2的输出电流按比例r2:r1=1∶0.5分配。当非线性积分控制激活时,变流器1的输出电流由12.5 A变为0.94 A,变流器2的输出电流由0.63 A变为0.94 A,动态调节时间仅为60 ms,2个变换器的输出电压变化不大。船舶在航行中主要有停靠港、巡航及加减速等工况,这些工况的典型特征均表现为推进电机功率变化对船舶电网的冲击,因此本文利用负载突变实验进行了模拟。
图10(b)显示了负载突变对DC-DC变换器的输出电压和电流的影响,2个变换器始终保持较高的均流精度,动态调节时间仅为80 ms。图10(c)可以看出虚拟负阻抗进一步补偿了线路阻抗造成的母线电压跌落。

图10 所提出控制方法的实验结果Fig.10 Experimental results of the proposed control method
5.2 案例2: 通讯故障对均流策略的影响
本实验旨在测试通讯故障对所提出策略的影响。从图11(a)可以看出,当变换器1无法从变换器2接收数据时,变换器1中计算的公共虚拟交流电压幅值从10 V降低到5 V,变换器2中计算的公共虚拟交流电压保持不变。图11(a)还显示虚拟交流电压周期内进行10次的通信频率可以确保完整的交流信号。从图11(b)可以看出,虽然通信故障导致每个变换器中的公共虚拟交流电压不一致,但是变换器之间依然保持高精度的电流分配。实验结果表明,该控制算法具有良好的通信容错能力。

图11 通信故障下的实验结果Fig.11 Experimental results of communication failure
6 结 论
下一步工作主要集中在2个方面:1)研究邻域通信情况下基于虚拟频率的下垂控制方法;2)不依赖通信的DC-DC变换器均流控制研究。
