虚拟同步双馈风机对同步机作用路径及低频振荡影响分析
2021-06-10迟永宁雷雨季笑庆刘俊旭何维章晓杰
迟永宁,雷雨,季笑庆,刘俊旭,何维,章晓杰
(1.中国电力科学研究院有限公司,北京市海淀区 100192;2.强电磁国家重点实验室(华中科技大学),湖北省武汉市 430074;3.国网山东省电力公司烟台供电公司,山东省烟台市 264000)
0 引言
近年来,随着风电的迅速发展,风电的高比例并网引起了电力系统中电源组成结构的重大变革,风电已成为电力系统的主力电源之一,由之而来给系统的动态过程和稳定性都带来了巨大的挑战。为了应对由传统矢量控制方式下的风电机组并网带来的惯量和阻尼减小,系统动态恶化,稳定性降低等问题,基于虚拟同步控制的风电机组以其自生并网的内电势可不依赖于锁相环实现与电网的同步运行,为电网提供主动支撑的优良特性,正得到越来越多的应用[1]。在此背景下,虚拟同步控制的风电机组自身的动态特性将成为决定电力系统动态和稳定性的重要因素,对虚拟同步控制风电机组影响电力系统动态和稳定性的机理进行深入理解和分析是虚拟同步技术在风力发电中得到更好的发展和应用的关键。
其中,虚拟同步双馈风机并网后对系统小干扰稳定性尤其是对系统低频振荡的影响机理成为亟待分析和解决的问题。目前专门针对虚拟同步双馈风机对系统低频振荡影响的研究还比较少,现有文献大多集中于对虚拟同步发电机(VSG)控制的电压源型逆变器接入对系统低频振荡的影响而进行的研究。文献[2-6]基于单个VSG接入,建立了VSG的小信号模型,通过特征值分析、阻尼转矩等分析方法探究了其对系统低频振荡模式的影响特性;文献[7]建立了含多个VSG的闭环系统线性化互联模型,分析了多VSG接入对系统振荡模式的影响机理;文献[8]提出了新能源发电机组在虚拟同步控制方式下的阻尼转矩分析模型,分析了影响系统低频振荡模式阻尼特性的因素,但其对于VSG控制发电机组的建模只简单地采用了虚拟同步控制环节的二阶模型,并未考虑发电机组机械控制部分的影响,而事实上,风电机组的机械控制部分是影响风电机组动态特性的关键部分;文献[9]基于戴维南-诺顿等效方法建立了虚拟同步双馈风机的小信号模型,分析了虚拟同步双馈风机的高、中、低频振荡模式,但尚未涉及虚拟同步双馈风机对电力系统影响的分析。综上所述,虽然国内外对VSG控制的逆变器接入对系统低频振荡影响有丰富的研究,但专门针对虚拟同步双馈风机的研究还相对欠缺,此外,目前对于虚拟同步双馈风机对系统中同步机作用的路径和物理过程的认识也仍存在空白。
本文以虚拟同步双馈风机为研究对象,首先建立了能够全面反映虚拟同步双馈风机动态特性的运动方程模型,然后以单同步机单虚拟同步双馈风机-无穷大电网系统为例,通过建立系统的拓展H-P模型,分析了虚拟同步双馈风机对同步机作用的路径以及物理过程,在此基础上,基于阻尼转矩法和特征值分析法阐明了虚拟同步双馈风机对同步机低频振荡的影响机制。
1 虚拟同步双馈风机基本控制策略
本文采用的双馈风机虚拟同步控制策略如图1所示。首先由风力机控制产生有功功率参考值,类似于同步机的原动系统,然后通过在转子侧变换器中采用虚拟同步控制方式实现对转子励磁电压幅值和频率的独立控制,网侧变换器主要用来维持直流电压的稳定。

图1 虚拟同步双馈风机控制框图Fig.1 Block diagram of the control for DFIG-based WTs with VSynC
图1转子侧变换器的控制中, Pref和 Utref分别为有功功率指令值和端电压指令值; Pe和 Ut分别为输出电磁功率和端电压幅值; θr和 Ur分别为励磁电压的相位和幅值; ωs和 ωt分别为虚拟角频率和电网角频率; Tj和 D分别为虚拟惯性时间常数和阻尼系数; Kpu和 Kiu为电压控制参数,所有量均为标幺值, ω0为额定角频率。转子励磁电压Ur的频率和幅值分别由功率同步控制和端电压控制独立调节,其表达式如下:

式中:功率同步环节是确保双馈风机不依赖于电网状态而实现与电网同步运行的核心环节,实现了虚拟同步双馈风机的固有惯量属性,主动为系统提供惯性支撑,改善系统的频率响应;此外,通过设置合适的功率同步环节的阻尼系数有助于改善系统的振荡现象,提升系统的稳定性。
2 虚拟同步双馈风机运动方程建模
对电网侧而言,同步机、虚拟同步双馈风机等并网装备均可看做为一个与电网同步的内电势旋转矢量,通过调节内电势的频率和幅值来维持电网有功和无功功率的平衡,实现频率和电压的稳定[10]。因而可以建立以不平衡有功和无功功率为输入,虚拟同步双馈风机内电势频率/相位和幅值为输出的运动方程模型,通过等效惯量和阻尼特性来描述电网扰动下虚拟同步双馈风机内电势旋转矢量的运动,从而分析虚拟同步双馈风机的动态特性。
为建立虚拟同步双馈风机的内电势运动方程模型,首先需对其内电势进行定义。根据文献[11],虚拟同步双馈风机的内电势可定义如:

式中:Ur为转子励磁电压旋转矢量; Lr为转子绕组的自感; Lm为 定转子绕组间的互感;ωr为转子角频率;R =Rv+Rs,Rv为 虚拟电阻,Rs为转子绕组电阻。
在三相静止坐标系下,内电势旋转矢量 Es可表示为:

θs为 内电势相对于静止坐标系的相位; θz为由阻抗及转差形成的相角; θc为由功率同步控制调节产生的励磁电压的控制角。
在此定义下,有:

由此可推得虚拟同步双馈风机的有功和无功功率表达式:

式中:δ为虚拟同步双馈风机内电势与端电压之间的夹角,也称功角。
根据内电势的定义,假定风速在动态过程中保持不变,忽略锁相环的动态过程,可以推得图2所示的虚拟同步双馈风机机电尺度的内电势控制框图。图中,功角 δ和实际端电压幅值 Ut通过上面的功率表达式用有功和无功功率和内电势幅值间接表示, fδ(Pe,Qe,Es) 和 fUs(Pe,Qe,Es)的表达式可见附录A。图中红色虚线框框出了模型中的非线性部分。
通过对图2所示模型中的非线性部分进行线性化,可推得图3所示的虚拟同步双馈风机小信号模型。该模型计及了虚拟同步双馈风机的不同运行工作区的控制,如图中橙色虚线框所示。A1,A2,A3分别代表MPPT区、恒转速区、恒功率区。
进一步地类比同步机运动方程的形式,对上述模型进行变换,可以推得图4所示的虚拟同步双馈风机运动方程模型。图中:
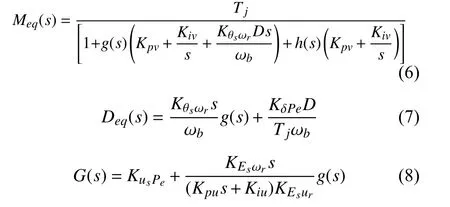
式中:g(s)和h(s)是与虚拟同步双馈风机运行工作区相关的函数,其具体表达式为:
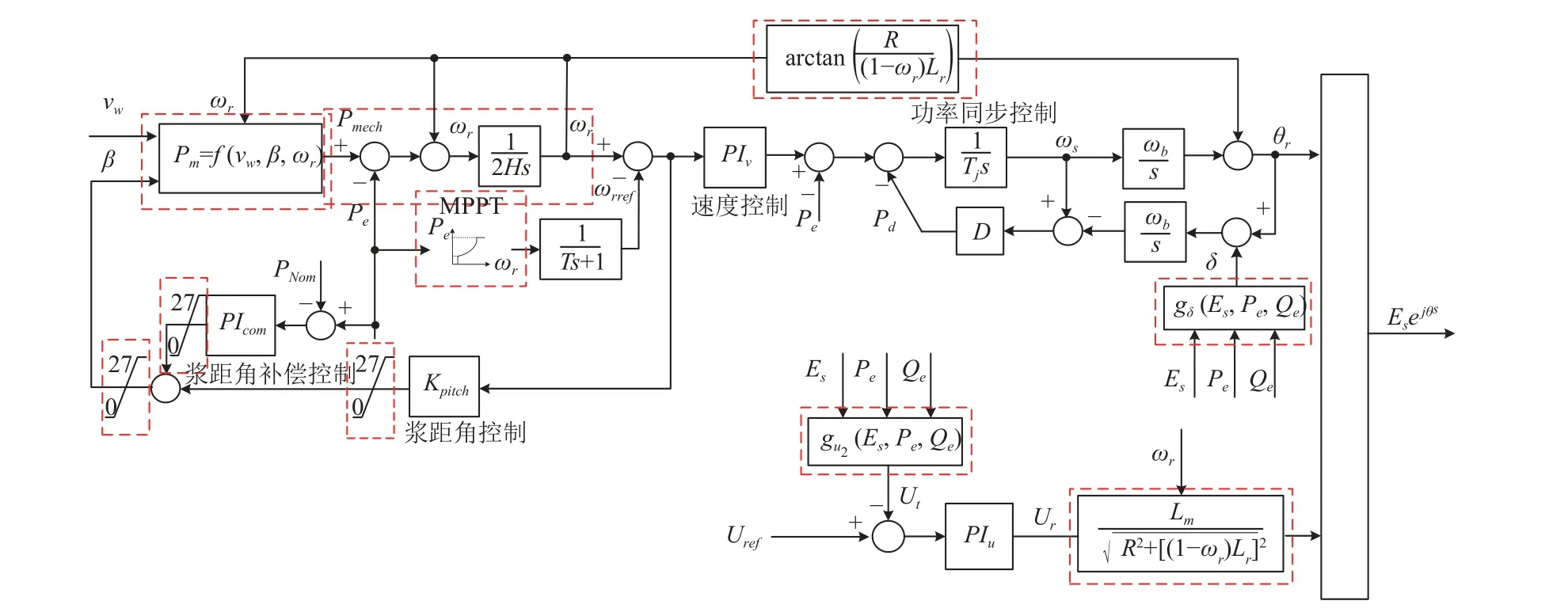
图2 虚拟同步双馈风机机电尺度内电势控制框图Fig.2 Block diagram of internal e.m.f.control of DFIG-based WTs with VSynC in electromechanical time scale

图3 虚拟同步双馈风机小信号模型Fig.3 Small signal model of DFIG-based WTs with VSynC


图4 虚拟同步双馈风机内电势运动方程模型Fig.4 Internal e.m.f.motion equation of DFIG-based WTs with VSynC
该运动方程模型直观地反映了在不平衡有功和无功功率激励下虚拟同步双馈风机内电势的频率/相位和幅值响应的规律。有功功率激励-内电势频率/相位响应支路反映了不平衡有功功率是如何通过等效惯量和等效阻尼影响内电势频率/相位的运动,以及等效惯量和等效阻尼系数又是如何受控制参数以及初始运行点的影响;无功功率激励-内电势幅值响应支路反映了无功功率或端电压不平衡时内电势幅值的运动规律。有功功率激励-内电势频率/相位响应支路和无功功率激励-内电势幅值响应支路之间的交叉耦合项则分别反映了不平衡有功功率对内电势幅值的影响规律、不平衡无功功率对内电势频率/相位的影响规律。
3 虚拟同步双馈风机对同步机作用的路径及低频振荡的影响分析
为探究虚拟同步双馈风机对同步机作用的路径以及低频振荡的影响,本节将以图5所示的单虚拟同步双馈风机单同步发电机接入无穷大电网的两机系统为例进行建模和分析。图中,将虚拟同步双馈风机群用单台风机等效表示,对同步机采用三阶实用模型, Vg和 Vpcc分别为无穷大母线电压和并网点母线电压; Vt和 Vs分别为同步机和虚拟同步双馈风机的端电压; Eq和 Es分别代表同步机和虚拟同步双馈风机的内电势; δSG和 δw分别为同步机和虚拟同步双馈风机内电势与无穷大母线电压之间的夹角; x1, x2, x3为线路阻抗。
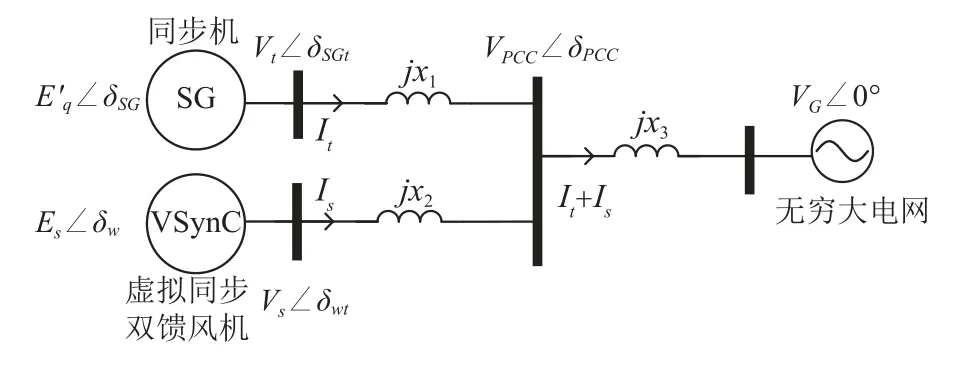
图5 虚拟同步双馈风机和同步机并入无穷大电网系统Fig.5 Infinitive bus connected virtual DFIG-based WTs with VSynC
3.1 单同步机单虚拟同步双馈风机-无穷大系统线性化分析模型
根据图5所示的系统结构,对虚拟同步双馈风机采用第2节所建立的运动方程模型,对同步机采用文献[12]中的三阶实用模型,有

式中:励磁系统采用一阶模型,有

式中: Eq为同步机的空载电势; Efd为励磁电动势;θt为同步机暂态内电势相位; ωSG为同步机转子转速;为d轴暂态开路时间常数; MSG和 DSG分别为同步机的惯量和阻尼系数。
以同步机的dq坐标系作为系统的参考坐标系,系统中同步机内电势矢量、虚拟同步双馈风机内电势矢量以及无穷大电网电压矢量之间的相位关系如图6所示。α为虚拟同步双馈风机内电势与d轴之间的相角,且有 α =δw−δSG+90◦。
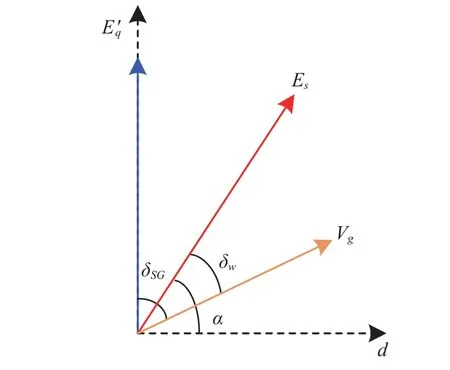
图6 同步机dq坐标系下的内电势矢量关系图Fig.6 Relation of internal e.m.f.vectors in d-q coordinate system for synchronous generator
下面对单同步机单虚拟同步双馈风机-无穷大系统进行线性化。
同步机和虚拟同步双馈风机的定子电压表达式为:

式中: Itd和 Itq分别为同步机定子绕组电流的dq轴分量, Is为虚拟同步双馈风机定子绕组的电流矢量;和 xq分别为同步机的d轴瞬变电抗和q轴同步电抗。
根据图5所示的网络结构有如下关系式

将电流 It和 Is用同步机和风机内电势以及无穷大电网电压来替代表示,对上式进行线性化并求解可得:
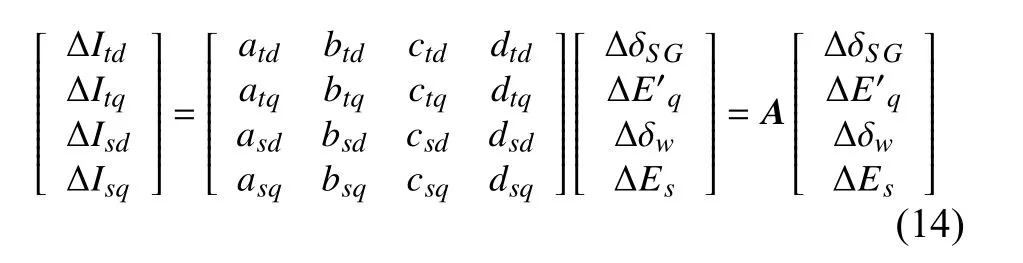
式中:A矩阵元素的具体大小与初始状态和网络结构均有关,其具体表达式可见附录B。
将式(14)代入功率表达式,可得同步机电磁功率表达式如下

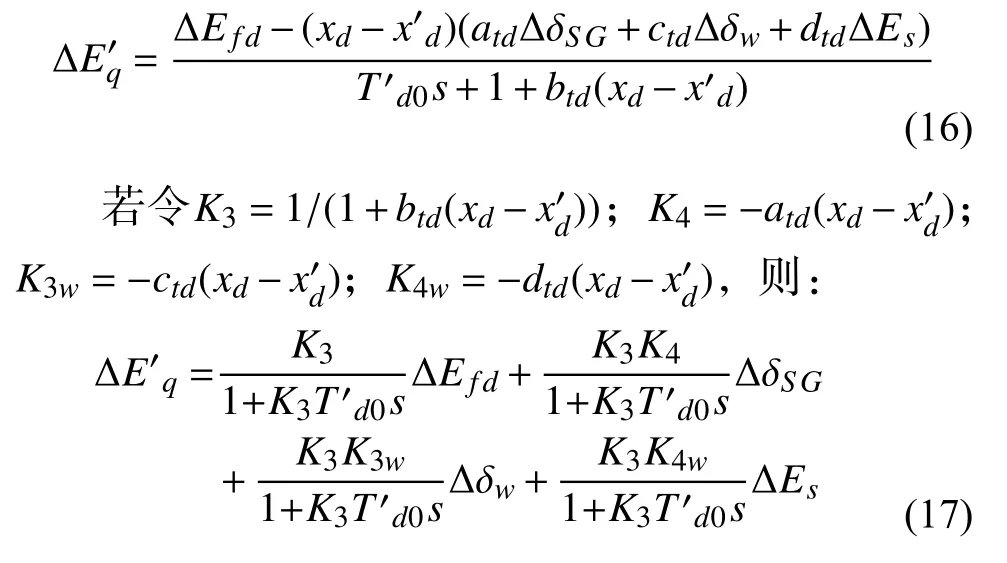
对同步机内电势的幅值进行线性化有
对同步机端电压的幅值进行线性化:
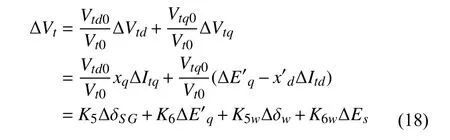
以上同步机K1~K6的系数表达式和虚拟同步双馈风机K1w~K6w的系数表达式详见附录C。同步机K1~K6系数的含义与传统的Heffron-Philips模型中K1~K6的含义相一致,分别表示同步机内电势的相位变化对同步机的电磁功率、去磁效应以及端电压幅值的影响;虚拟同步双馈风机系数K1w~K6w分别表示风机内电势的相位和幅值变化对同步机电磁功率、去磁效应以及端电压幅值和的影响。
由第2节可知,虚拟同步双馈风机内电势的相位幅值变化由不平衡有功和无功功率驱动,根据图2所示的网络结构和式(14),可以将虚拟同步双馈风机的不平衡有功和无功功率用同步机和风机内电势的相位和幅值来表示:

对虚拟同步双馈风机内电势的有功和无功功率进行线性化:

式中:各系数表达式详见附录D。
同时,根据前面虚拟同步双馈风机运动方程模型中从不平衡功率到内电势的相位和幅值的关系,可以得到虚拟同步双馈风机内电势幅值相位与同步机内电势幅值相位之间的关系:

基于以上所有关系式,最终可以得到图7所示的系统分析模型。该模型包含了三个部分,首先是以系数K1~K6为代表的反映同步机内电势相位变化对同步机自身影响的部分,用绿色矩形框表示;其次是以系数K1w~K6w为代表的反映虚拟同步双馈风机内电势相位和幅值变化对同步机影响的部分,用橙色矩形框表示;最后是以传递函数H1w(s)~H4w(s)为代表的反映同步机内电势相位和幅值变化对虚拟同步双馈风机内电势的相位和幅值影响的部分,用蓝色矩形框表示。该模型完整反映了同步机与虚拟同步双馈风机之间的物理相互作用路径,为后面分析虚拟同步双馈风机对同步机低频振荡的影响奠定了基础。
3.2 虚拟同步双馈风机对同步机作用的路径分析
从图7所示的模型可以看出,同步机内电势状态变化时不仅会通过系数K1~K6对自身的电磁功率、端电压幅值和去磁效应产生影响,而且将通过传递函数H1w(s)~H4w(s)引起虚拟同步双馈风机内电势的相位和幅值的变化,然后经过系数K1w~K6w进一步对同步机自身产生影响。
在这个过程中,虚拟同步双馈风机通过等效地改变同步机传统Heffron-Philips模型中的K1~K6系数从而对同步机的内电势产生动态影响。根据图7所示的系统分析框图,用K1eq~K6eq表示计入虚拟同步双馈风机影响之后同步机等效的K1~K6系数,则有其表达式:

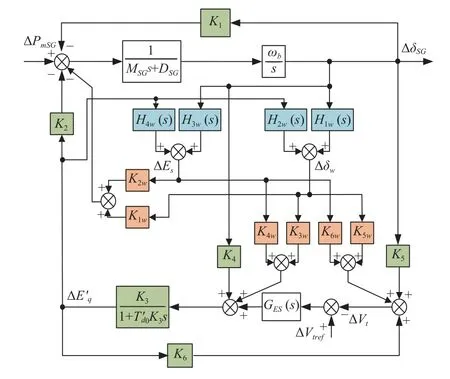
图7 系统分析框图Fig.7 Block diagram for system analysis
可以看到,等效后的K1eq~K6eq系数不仅包括了反映同步机内电势相位幅值变化对自身影响的K1~K6系数,还存在反映虚拟同步双馈风机内电势相位幅值变化对同步机影响的附加支路KiwHjw(s) (i=1,2,…,6, j=1,2,3,4),因而通过对附加支路KiwHjw(s)的特性进行研究就可以知道虚拟同步双馈风机对同步机H-P模型各条支路的影响规律。
在图2所示的网络拓扑结构中,当虚拟同步双馈风机输出功率变化时,相关系数的大小可见表1。

表1 虚拟同步双馈风机输出有功变化时的各项系数值Table 1 Coefficient values under output active power varying of DFIG-based WTs with VSynC
通过对KiwHjw(s)进行分析,可以知道:
1) 与系数K1的大小相比,同步机通过支路K1wH1w(s)对有功功率的影响无法忽略,且会等效地减小K1,而支路K2wH3w(s)的影响可忽略;
2) 与系数K2的大小相比,同步机通过支路K1wH2w(s)对有功功率的影响无法忽略,且会等效地增大K2,而支路K2wH4w(s)的影响可忽略;
3) 与系数K4的大小相比,同步机通过支路K4wH3w(s)+ K3wH1w(s)对有功功率的影响均可忽略;
4) 与系数K5的大小相比,同步机通过支路K5wH1w(s)对有功功率的影响无法忽略,且会等效地减小K5,而支路K6wH3w(s)的影响可忽略;
5) 与系数K6的大小相比,同步机通过支路K6wH4w(s)+ K5wH2w(s)对有功功率的影响均可忽略;
6) 与系数1/K3的大小相比,同步机通过支路K4wH4w(s)+ K3wH2w(s)对有功功率的影响均可忽略。
按上述分析,对图7所示的框图进行整理之后最终可以得到图8所示的虚拟同步双馈风机对同步机的作用路径分析框图:
图中蓝色实线框代表不可忽略的支路,灰色虚线框代表可忽略的支路。可以看到,虚拟同步双馈风机主要通过影响同步机H-P模型中等效的K1,K2和K5系数最终对同步机的阻尼功率产生影响。
3.3 虚拟同步双馈风机对同步机低频振荡的影响
本节采用转矩法来分析虚拟同步双馈风机对同步机低频振荡模式的影响。根据文献[10],同步机低频振荡模式的阻尼大小主要由阻尼功率决定,振荡频率主要由同步功率决定,通过研究虚拟同步双馈风机小扰动特性对同步机阻尼功率的影响即可分析其对同步机低频振荡的影响。

图8 虚拟同步双馈风机对同步机的作用路径分析框图Fig.8 Block diagram for analyzing acting path of DFIG-based WTs with VSynC to synchronous generator
由图8可得到同步机电磁功率的表达式如下:

因励磁系统采用快速励磁的方式,励磁系统Gex(s)的时间常数TE非常小,为便于分析,此处将其忽略。同时,励磁系统的增益KA往往较大,K3K6KA将远大于1,所以可进一步简化为:

结合上节的分析,同步机的阻尼功率系数Dp可近似表示为:
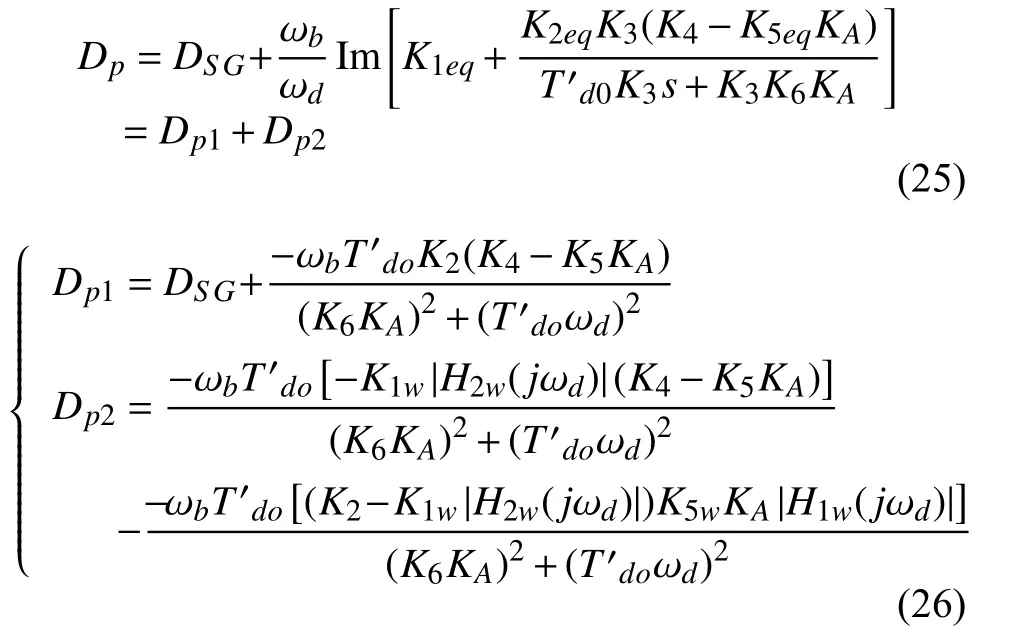
式中:阻尼系数Dp由两部分组成,一部分是不考虑虚拟同步双馈风机,同步机自身的阻尼功率系数,由Dp1表示;另一部分是虚拟同步双馈风机对同步机附加的阻尼功率系数,由Dp2表示。由前面的分析知道,K1w<0,K5w<0,因而导致Dp2<0,使得同步机的阻尼功率系数减小了。因而,虚拟同步双馈风机内电势的相位受同步机内电势相位和幅值的变化而变化继而直接影响同步机有功功率或通过影响同步机端电压幅值变化的支路间接影响同步机有功功率的支路是虚拟同步双馈风机对同步机阻尼影响的主要路径。
同时,由于在机电振荡频段,随着虚拟同步双馈风机虚拟惯性时间常数Tj的增大,H1w(s)和H2w(s)的幅值均将减小,从而Dp2的绝对值减小,Dp2增大,同步机低频振荡的阻尼将增大;同样,随着虚拟同步双馈风机阻尼系数D的增大,H1w(s)和H2w(s)的幅值均将减小,从而Dp2的绝对值减小,Dp2增大,同步机低频振荡的阻尼将增大。若保持电压控制的阻尼比不变,增大电压控制环节的带宽,H1w(s)和H2w(s)的幅值将略微增大,从而Dp2的绝对值增大,Dp2减小,同步机低频振荡的阻尼将减小。调节虚拟同步双馈风机的控制参数将通过影响虚拟同步双馈风机内电势受同步机内电势幅值和相位变化影响而变化的特性进而影响同步机低频振荡的阻尼。
图9是虚拟同步双馈风机在控制参数不同的情况下同步机的低频振荡模式的变化规律。虚拟惯性时间常数Tj的调节范围设置于6~15;阻尼系数D的调节范围设置于60~80;保持电压控制的阻尼比不变,参数Kpu和Kiu分别在1~2和100~400之间变化。从图中可见,虚拟同步双馈风机虚拟惯性时间常数Tj和阻尼控制参数D增大时,同步机低频振荡的阻尼和振荡频率均有所增大;虚拟同步双馈风机电压控制带宽增加时,同步机低频振荡的阻尼将减小,振荡频率增加。与上面分析所得的结论相一致。

图9 虚拟同步双馈风机控制参数变化时同步机低频振荡模式主导特征值的变化规律Fig.9 Change rule of dominant eigenvalue of synchronous generator under low frequency oscillation mode during control parameter variation of DFIG-based WTs with VSynC
4 仿真验证
在Matlab/Simulink中搭建图2所示的单台同步机和单台虚拟同步双馈风机与无穷大电网相连的详细电磁暂态模型进行仿真验证。系统的网络结构、同步机和虚拟同步双馈风机的控制参数和初始运行点均与前面一致。在t=1 s时,设置三相短路故障,过0.1 s后故障切除。不同虚拟惯量控制参数Tj、阻尼系数D和电压控制带宽下的仿真结果如图10~12所示。
图10反映了虚拟同步双馈风机在不同虚拟惯量控制参数Tj下同步机和虚拟同步双馈风机有功功率和转速的动态过程,可以看到,随着Tj的增大,同步机低频振荡的阻尼逐渐变好,低频振荡的振荡频率增大。
图11显示了虚拟同步双馈风机在不同阻尼系数D下同步机和虚拟同步双馈风机有功功率和转速的动态过程,由图可见,随着阻尼系数D的增大,同步机低频振荡的阻尼变好,振荡频率增大。
图12显示了虚拟同步双馈风机在不同电压控制带宽下虚拟同步双馈风机有功功率和转速的动态过程。随着电压控制的带宽增大,同步机低频振荡的阻尼变差,振荡频率略有增大但变化并不明显。

图10 不同虚拟惯性时间常数Tj下的仿真结果图Fig.10 Simulation results under different virtual inertial time constant Tj
综上所述,仿真所得结果与前面的分析结果相一致,较大的虚拟惯量控制参数Tj和较大的阻尼系数D可以改善同步机低频振荡的阻尼,而较大的电压控制带宽则会使同步机低频振荡的阻尼恶化。
5 结论
1) 虚拟同步双馈风机内电势的相位随同步机内电势相位和幅值的变化而变化,继而直接影响同步机有功功率或通过影响同步机端电压幅值变化的支路间接影响同步机有功功率是虚拟同步双馈风机对同步机阻尼影响的主要路径。即虚拟同步双馈风机内电势相位的动态特性在对同步机低频振荡的影响中起主要作用。

图11 不同阻尼控制系数D下的仿真结果图Fig.11 Simulation results under different dampingcontrol coefficients D

图12 不同电压控制带宽下的仿真结果图Fig.12 Simulation results under different bandwidth of voltage control
2) 在机电振荡频段,虚拟同步双馈风机虚拟惯性时间常数Tj和阻尼系数D的增大可以改善同步机低频振荡的阻尼,而电压控制带宽的增大则会使同步机低频振荡的阻尼恶化。
(本刊附录请见网络版,印刷版略)