拒止环境下基于“忠诚僚机”的护航策略
2021-06-09田磊赵启伦董希旺李清东吕金虎任章
田磊,赵启伦,董希旺,4,*,李清东,吕金虎,4,任章,4
(1.北京航空航天大学 自动化科学与电气工程学院,北京100083;2.北京航空航天大学 飞行器控制一体化技术国防科技重点实验室,北京100083;3.北京电子工程总体研究所,北京100854; 4.北京航空航天大学 大数据科学与脑机智能高精尖创新中心,北京100083)
美军为提高在拒止环境下的作战能力,提出了分布式协同作战的理念。拒止环境是美军对强对抗环境的别称,具有强电磁干扰、强对抗博弈等特点,而拒止环境势必造成单体作战效能的减弱,进而分布式协同作战理念广受关注。“忠诚僚机”计划是美军为应对强对抗博弈环境而提出的新型作战样式,由少量高价值有人平台和大量低成本无人平台组成,是分布式协同作战的重要组成部分。而编队跟踪控制技术为实现拒止环境下的“忠诚僚机”计划提供了有力的技术支撑。现有的编队跟踪控制方法主要分为集中式和分布式2种。集中式控制方法存在中心节点,对通信带宽要求高,抗干扰能力差;分布式控制方法通过局部有限邻居智能体之间的交互实现具体的任务,对通信带宽要求低,具备良好的抗干扰能力和可扩展能力[1]。
随着一致性理论的发展,近年来在分布式编队控制领域涌现出丰硕的研究成果。Dong[2]和He[3]等分别研究了连续时间和离散时间条件下的编队控制问题。Wang等[4]给出了一种单个智能体不依赖通信拓扑全局信息的编队控制方法。Hua等[5]研究了系统存在不确定参数及未知扰动情况下的时变编队控制问题。随着研究的深入,研究者们将如何控制整个编队的移动纳入研究的重点,进而衍生出编队跟踪控制问题。Dong等[6]研究了二阶多智能体系统的编队跟踪控制问题,并将其成功应用到无人机编队飞行中。Yu等[7]基于扩张状态观测器理论构造分布式的控制协议,解决了多移动机器人系统的编队跟踪控制问题。Dong[8]和Yu[9]等分别研究了存在多个领导者情况下线性和非线性多智能体系统时变编队跟踪控制问题。Su等[10]给出了随机采样机制下多智能体系统内部同时存在通信延迟和多个领导者时编队跟踪控制问题的解决方案。Hua等[11-12]进一步将多智能体系统由同构模型扩展到异构模型,研究了异构多智能体系统的时变编队跟踪控制问题。为使编队跟踪能够在有限时间内完成,Hua等[13]还研究了高阶同构系统存在不匹配扰动情况下有限时间时变编队跟踪控制问题。更进一步,Duan等[14]研究了高阶异构多智能体系统的有限时间编队跟踪控制问题。
综上所述,有关时变编队跟踪控制的研究成果十分丰富,但需要指出的是,上述文献并没有对时变编队队形进行明确定义,仅用一个时变函数来概括性表示编队偏移量,也没有对时变编队的应用性进行研究,而且该信息实际为全局信息在上述文献中为隐含全局信息。本文提出了一种基于集群系统分布式时变编队跟踪控制方法的护航策略,并考虑了拒止环境对通信拓扑的影响,是编队跟踪控制方法的一种典型实战应用。本文的创新点主要有:①基于分布式时变编队控制理论,结合应用背景和工程意义,给出了一种能够“忠诚僚机”的护航策略控制方法;②考虑长机-僚机系统存在外部扰动且长机存在大机动的情况,构造分布式观测器对敌方来袭导弹的方位角进行估计,进而结合观测器理论、自适应控制理论、滑模控制理论设计了分布式控制器,摆脱了对敌方来袭导弹方位角、通信拓扑结构及未知扰动上界等全局信息的依赖;③考虑在拒止环境下,复杂电磁干扰带来通信时断时续,导致长机与僚机及僚机与僚机之间的通信拓扑存在切换,进而在上述分布式观测器和控制器中加入通信拓扑切换信息,并根据Lyapunov理论给出了长机-僚机闭环系统的稳定性证明。
1 图论知识和问题描述
1.1 图论知识

1.2 问题描述
本文研究的系统模型为长机-僚机模型,包含1个长机和N个僚机。由于不同类型的飞行器近似线性化后的模型不尽相同,不失一般性,长机的模型定义为

僚机的模型定义为

式中:A、B为模型近似线性化后的系统矩阵;y1(t),yp(t)∈Rn为状态量;u1(t),up(t)∈Rm为控制输入量;dp(t)∈Rm为未知扰动量;p=2,3,…,1+N。
注释1大多数空中飞行器在其工作点附近一般都可以近似线性化处理。例如,田磊等[15]给出了旋翼飞机近似线性化处理后的模型,Wang等[16]给出了固定翼飞机近似线性化处理后的模型。因此,上述长机和僚机定义模型的应用性较为广泛。
假设1在图G所表征的通信拓扑中,长机与某个僚机之间如果存在连接,则连接关系是从长机指向僚机的单向连接,而僚机之间的连接均为双向连接。当有多枚敌方导弹来袭时,僚机被分为多个小组,且不同小组之间不存在通信,整个通信拓扑包含一棵以长机为根节点的生成树。
如果假设1成立,当有M枚敌方导弹来袭时,图G的拉普拉斯矩阵可写为如下形式:

通过分析拉普拉斯矩阵的形式可知,对角块矩阵Lg(g=1,2,…,M)为正定实对称矩阵[17]。令Ldiag=diag{Lg,g=1,2,…,M}。
假设2图G所表征的通信拓扑关系在某段固定时间间隔(定义为驻留时间τ)内保持不变,该段时间间隔的最小值定义为最小驻留时间,用τmin表示。定义t0=0为初始时刻,tσ+1(σ=0,1,2,…)为切换时刻,则驻留时间τσ=tσ+1-tσ≥τmin,在[tσ,tσ+1)时间间隔内的拉普拉斯矩阵记为Lσ。
假设3长机的控制输入和僚机的未知扰动是有界的,但是其界限的具体数值是未知的,即满足u1(t)1≤η1、dp(t)1≤η2,η1、η2为未知正实数。
注释2在实际系统中,控制输入量和未知扰动量通常是有界的,但是其界限值通常不容易获取,因此假设2是合理的。
假设4长机上含有探测设备,能够探测出敌方来袭导弹的方位角γg(t)(g=1,2,…,M)。
注释3通常情况下,长机是价值较大需要保护的己方个体,长机上装有探测装置,可探测出来袭导弹的方位角。
引理1[15]对于任意正定实对称矩阵H∈RM×M(M=1,2,…),下列不等式关系成立:

式中:λmin(H)为矩阵H的最小特征值。
引理2[15]对于任意正定实对称矩阵H1,H2∈RM×M和任意向量x∈RM(M=1,2,…),下列不等式关系成立:

式中:λmax(H1H2-1)为矩阵H1H2-1的最大特征值。
定义1对于任意有界初始状态,如果以下关系式成立,且该关系式中设计的时变编队函数能够使僚机一直处于长机和敌方来袭导弹的视线轴上,则称本文提出的基于拒止环境下的时变编队跟踪控制方法的护航策略能够实现。

式中:p=2,3,…,1+N;hp(t)为设计的时变编队函数。
2 控制协议设计和系统稳定性分析
本节根据本文所提出的护航策略给出时变编队函数的设计方法,同时考虑拒止环境带来的影响,构造能够实现切换通信拓扑关系的分布式时变编队跟踪控制协议。不仅如此,设计协议时结合自适应控制理论,解决系统的外部扰动和通信拓扑全局信息不易获取的问题。通过Lyapunov理论对闭环系统的稳定性进行证明。
不失一般性,通过图1(二维横侧向XOY平面内)可直观地理解本文所提出的护航策略。
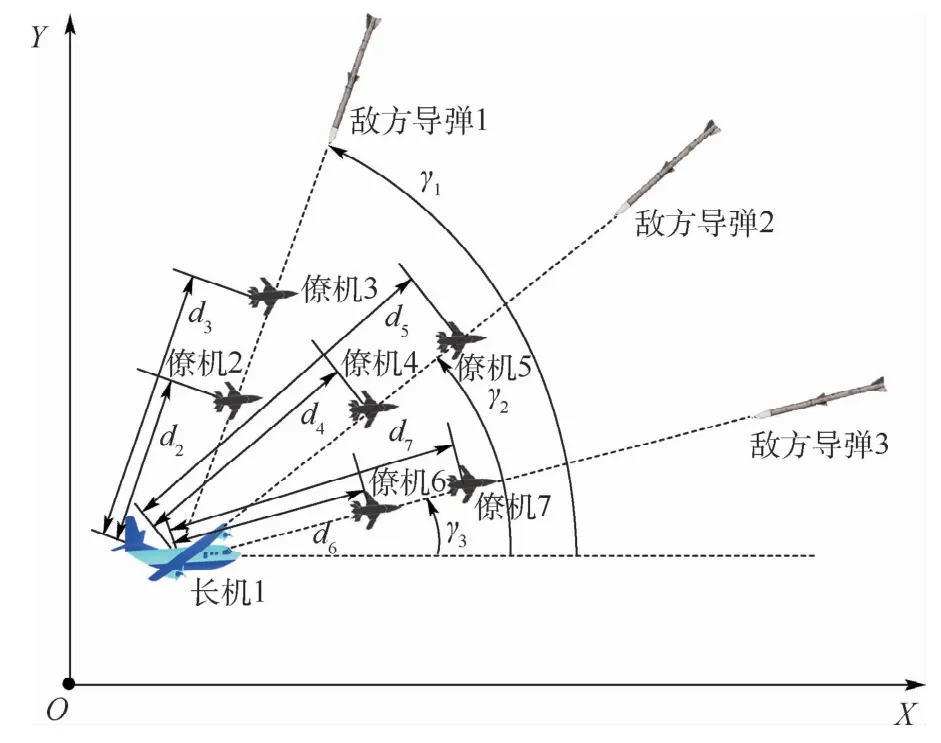
图1 护航策略示意图Fig.1 Schematic diagram of escort strategy
根据图1中给出的策略可知,二维平面内的时变编队函数可设计如下:


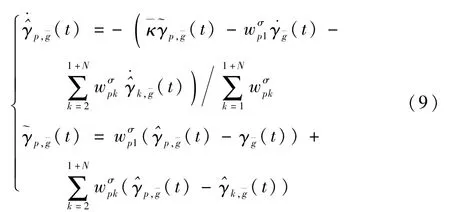
设计对γ¯g(t)的分布式观测器:
基于上述观测器,构造分布式自适应控制协议如下:
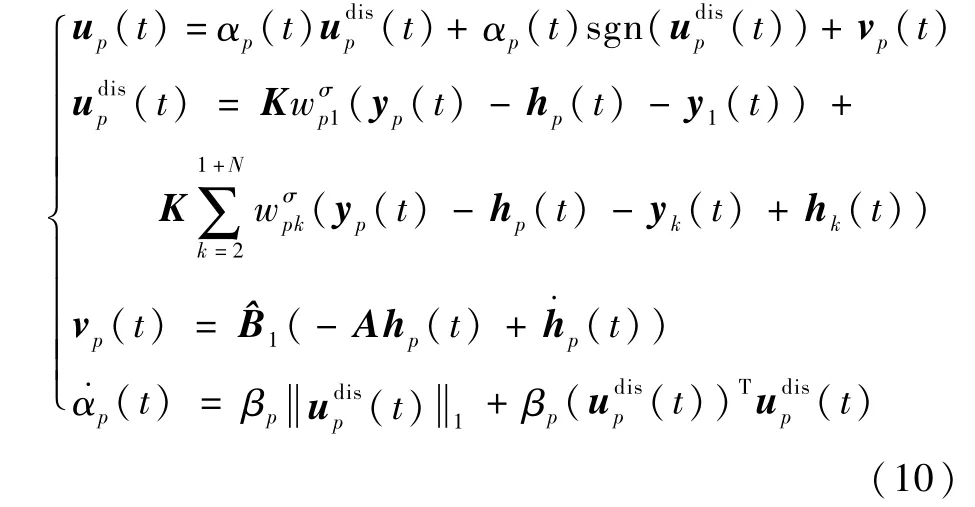
式中:sgn(·)表示标准符号函数;αp(t)为自适应增益;hp(t)为时变编队函数,其在OX轴和OY轴方向分别设计为式(7)中对应的函数,其他待确定参数由算法1确定,具体步骤如下:
步骤2根据下列Riccati方程计算正定实对称矩阵Q:

式中:μ为可选取的正实数,满足μ≤¯κ;P为可选取的正定实对称矩阵。
步骤3根据公式K=-BTQ计算增益矩阵K。
步骤4选取βp∈(0,+∞),βp为可调参数,可根据系统其他参数综合选取,从而避免过慢的响应速度或过高的控制增益。

证明首先证明分布式观测器(9)的收敛性。
由式(9)可知

式中:t∈[tσ,tσ+1),σ=0,1,2,…。
对V¯g(t)求导可得

由式(14)可得

因为系统的通信拓扑在tσ(σ=1,2,…)时刻发生切换,由引理2可得

根据式(15)和式(17)可以推出

运用递归方法可得

根据t-t0=t-tσ+tσ-tσ-1+…+t1-t0≥t-tσ+στmin可以推出

由lnε-μτmin<0和μ≤可得0,进而可知,等价于0,由于,而为非奇异矩,因此观测器(9)是收敛的。
接下来证明在控制协议(10)下,本文所提出的拒止环境下基于时变编队跟踪控制方法的护航策略可以实现。对于所有僚机,将式(10)代入式(2)中可得

令zp(t)=yp(t)-hp(t)-y1(t),同时定义z1(t)=0,可以推出

根据算法1中的步骤1及式(8)和式(10)可知,Bvp(t)-˙hp(t)+Ahp(t)=0,因此式(22)可写为阵,可得

可得

令z(t)=[z2(t),z3(t),…,z1+N(t)]T,u(t)=1⊗u1(t),d(t)=[d2(t),d3(t),…,d1+N(t)]T,同时令α(t)=diag{α2(t),α3(t),…,α1+N(t)},其中1为元素全部为1的列向量,则式(24)可写为如下形式:

考虑Lyapunov函数如下:

式中:χ为可选取的正常数;t∈[tσ,tσ+1),σ=0,1,2,…。
对V(t)求导并由K=-BTQ可得

因为
且根据δTsgn(δ)=δ1可得
所以式(27)可化为
进一步分析可得

同时分析可知
因此可以推出以下关系式成立:
根据引理1可知
选取足够大的χ满足:χ>max{η1+η2,
1/(2λmin(Lσdiag))},并 根据算 法1中 的 步 骤2可得

由式(36)可以推出

因为系统的通信拓扑在tσ(σ=1,2,…)时刻发生切换,由引理2可得

因为ξ(t)是连续的,因此以下关系式成立:V(tσ)≤εV)+(1-ε)ξ(tσ) (39)
由式(37)可推出
结合式(37)和式(39)可得

进而根据式(40)和式(41)可以推出

同理可以得到以下关系式:

因此可将式(42)进一步化为

更进一步运用递归方法可得

式中:
现对V*(t)进行分析,运用分部积分法可得

接下来分2种情况讨论:


3 数值仿真
仿真中模仿敌方导弹来袭场景,为更好地验证本文所提出的护航策略,想定如下:在拒止环境下,我方1架空中预警机通过预警雷达探测到3枚敌方来袭导弹的方位角,在进行机动规避时同步释放6架小型无人机担任“忠诚僚机”,引导这些小型无人机处于敌方来袭导弹的视线轴上。为模拟拒止环境给通信带来的不利影响,我方预警机与小型无人机采用分布式通信方式,每种通信拓扑结构只能维持极短的时间,时变拓扑的切换过程如图2所示,每次切换后的通信拓扑在G1、G2、G3中随机选取。为简化仿真计算,仿真仅考虑XOY横侧向平面内的质点运动,并采用文献[15]中的模型进行仿真验证,即经过近似线性化处理后,模型的系统矩阵为

图2 拒止环境下的通信拓扑关系Fig.2 Communication topologies in denial environment



图3 分布式观测器的估计误差Fig.3 Estimate error of distributed observer
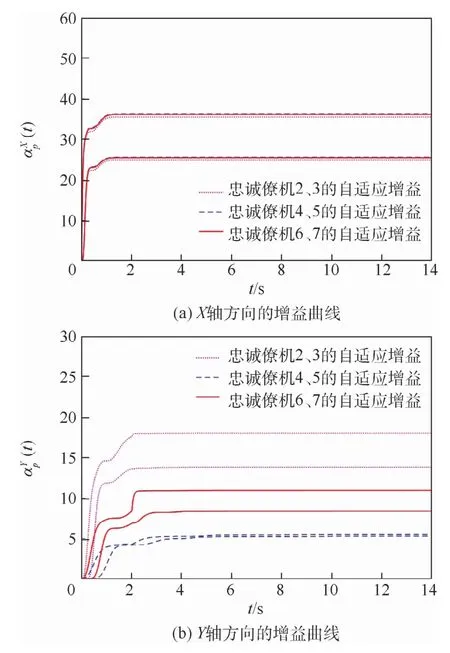
图4 无人机自适应增益曲线Fig.4 Curves of adaptive gains for UAVs

图5 整个护航过程图例Fig.5 Legend of whole escort process

图6 护航误差曲线Fig.6 Curves of escort error
4 结束语
本文提出了一种基于“忠诚僚机”的护航策略,该策略主要采用分布式时变编队跟踪控制的相关方法,设计控制协议时结合了观测器理论、自适应控制理论、滑模控制理论等,通过理论推导和仿真计算验证了该策略能够实现拒止环境下长机-僚机系统通信受到干扰时僚机对长机的护航作用,具有良好的工程应用意义。
