无人机管控软件设计
2021-06-08李自然王伟王琦
李自然 王伟 王琦

【摘要】 近几年,随着无人机在军事和民用中地位的提高,对无人机地面管控系统的研究也逐步成为一个热点。针对无人机管控系统的应用,本文设计了一款基于WPF框架的PC端应用软件。该地面站能够实时显示无人机轨迹、飞行状态,可以加载本地作业任务或者是新建任务发送给无人机,同时可以对无人机的飞行数据进行实时分析,本文主要介绍了软件的功能和UI。
【关键词】 无人机地面管控系统 WPF C# 数据分析
引言
无人机系统在日益发展,无人机地面管控系统也逐渐成为一个比较热门的领域。目前国内外主流的无人机管控系统主要功能有:轨迹显示、加载电子地图、状态信息显示、航迹规划、飞行数据记录以及操作指令等[1]。现有的无人机地面管控系统主要依靠的通信方式为串口通信,Socket通信使用较少,一般都需要在电脑端连接一个串口通信的外置设备,限制了用户的操作体验,同时,大部分地面站有日志文件,但是要等到无人机飞行结束后,才能对飞行数据进行分析,这样对飞机参数的设置带来不小的麻烦。作为无人机系统的的“神经中枢”,对地面管控系统的稳定性和实用性的要求也逐步提高。一款简单实用的无人机地面管控系统,使无人机能够执行更为复杂的作业任务,降低操作人员的工作量,对无人机系统是一个很大的优化。因而,对无人机地面管控系统的研究有着重大意义,无人机地面管控系统也发挥着越来越重要的作用[2-3]。
一、应用开发平台与工具
本系统设计采用的是WPF(Windows Presentation Foundation)框架,与MVC和MVP的最大区别就是WPF真正做到了前端UI开发和后端逻辑代码开发的分离,让专门的UI设计师开发前端界面,程序员则主要负责对后端逻辑代码的编写。开发平台是Visual Studio 2019,开发平台的使用建立在.NET基础之上[4-5],本设计的UI部分采用的是XAML语言,它通俗易懂,不需要很专业的编程基础,能够设计出优美的动画,UI设计师可以直接参与项目的研发。后台逻辑部分使用的是C#编程语言,它是由C和C++发展而来的一门编程语言,它与java非常相似,同时与java有着几乎相同的运行过程,但是C#与组件对象模型是直接生成的,在此基础上又增加了其他功能,同时他是.NET开发的首选编程语言[5-7]。
二、 软件功能及界面设计
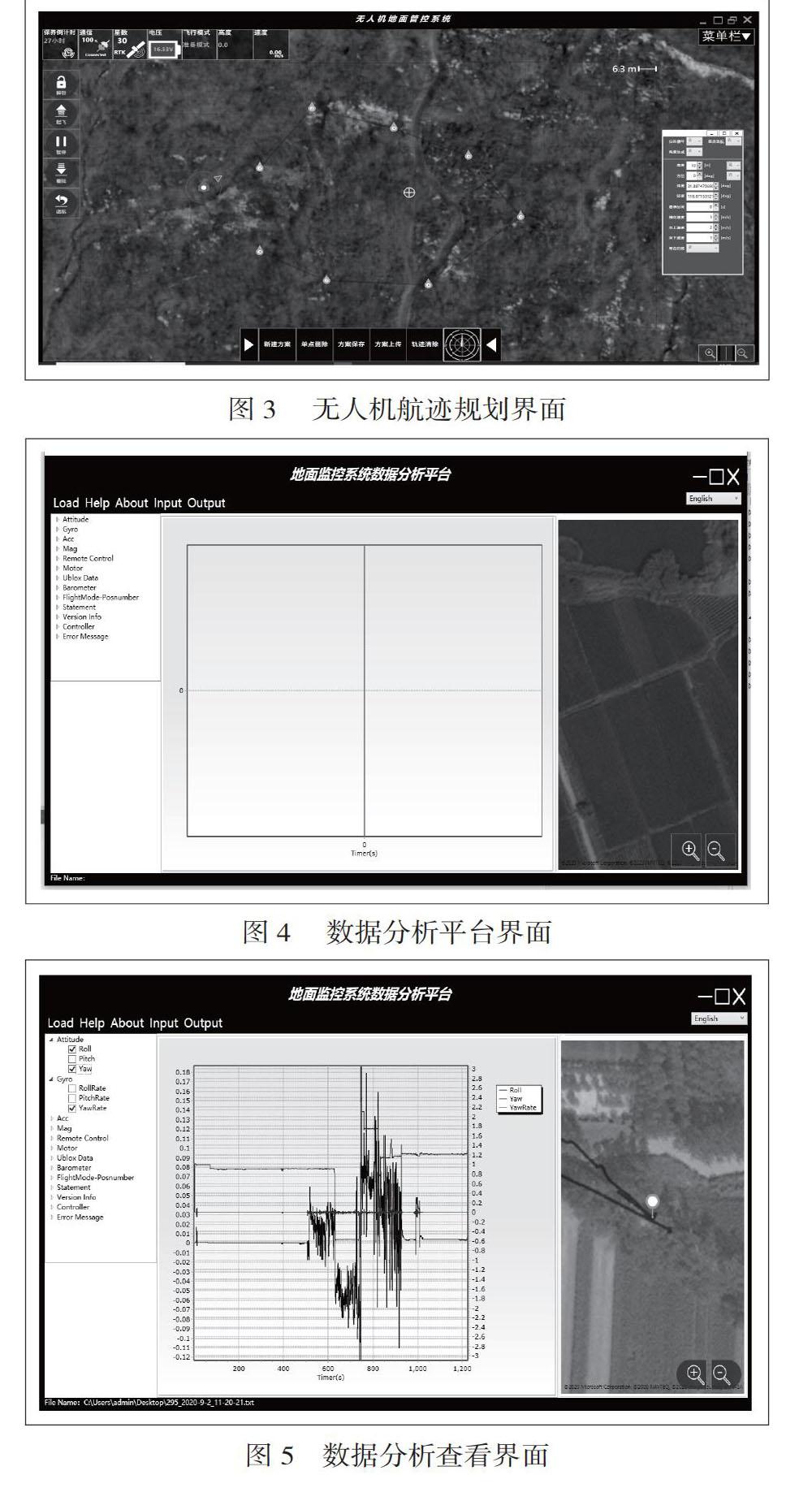
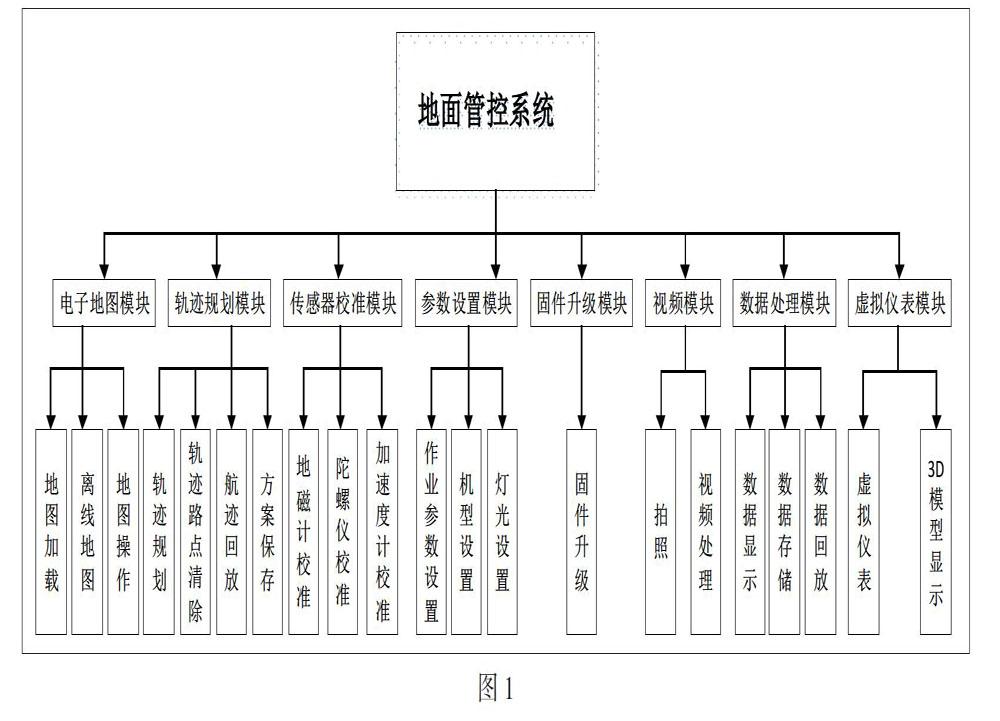
本系统设计的功能框图如下图1所示,主要分为电子地图模块、轨迹规划模块、传感器校准模块、参数设置模块、固件升级模块、视频模块、数据处理模块、虚拟仪表模块。电子地图模块主要包括电子地图的加载,我们可以加载谷歌、必应等各种卫星地图,同时我们在有网络的情况下也可以对地图进行缓存,这样在下次加载的时候就无需再次下载,而且在无网络的作业区域,我们可以提前下载好作业区域的卫星地图,这样就可以正常进行作业。轨迹规划模块主要包括无人机轨迹的实时显示,还可以对无人机保存的飞行数据日志文件进行轨迹回放,查看无人机飞行的各种状态,同时可以把已经建好的作业任务保存到本地数据库,这样下次可以直接导入,避免重复规划任务。传感器校准模块主要包括地磁校准、陀螺仪校准、加速度计校准,在组装飞控系统之前,对飞控系统各个模块的校准,可以保证飞控在无人机作业的同时保持稳定高效的运作,有效的防止了无人机炸机。参数设置模块主要包括作业参数设置、机型设置、灯光设置,在无人机作业之前我们可以针对无人机上次的飞行状态,来重新设置一些参数,让无人机飞行的更加平稳。固件升级模块主要是用来对程序的版本进行升级,把升级好的固件导入到模块中,就能够自动更新,减少了研发人员的工作量。视频模块主要包括视频的实时回传和拍照,通过实时的视频回传,我们可以清楚的看到无人机前方的障碍物,避免无人机撞到障碍物发生炸机,同时拍照功能所拍的照片能够保存到本地,以备后期查看和使用。数据处理模块主要包括无人机实时数据的显示和相关数据的存储,通过UI界面的展示,我们可以查看无人机的高度、速度、电压等一系列状态,同时,如果发生电压过低,距离过远,地面管控系统会发生警报,来提醒操作人员做一些相应的处理;数据处理模块还包括对飞行数据的查看,我们可以通过此模块,查看无人机的各种姿态角、遥控器控制量、油门控制量、任务航点数量、以及各个模块的版本号;这个模块还可以导入相机图传和RTK的数据文件,可以查看图传的联网状态,上传照片的数量,RTK主从天线的卫星数量,同时可以自主诊断相关问题,图传不正常的情况下是图传网络的问题还是程序版本的问题,RTK进不去的情况下是主天线的问题、从天线的问题还是环境本身信号不好对其造成的影响,在数据分析的二维图表中点击相应时刻的数据,由图的无人机标记位置也会对应到其同样的时刻,也就是说可以再同一时刻查看无人机的各种相关数据。虚拟仪表模块主要是通过串口接收无人机相关姿态的数据,送到前端仪表来展示无人机的3D飞行姿态,使用户体验更佳。
三、结语
随着无人机技术的逐渐发展,无人机地面监控系统的功能也日趋丰富[8],本设计不仅能够对无人机实时监控,还可以完成作业任务的下发,同时可以对无人机的数据实时分析,并能够给出相应的诊断结果,有着广阔的市场前景与应用空间。
参 考 文 献
[1] 钟柱梁,李庭威,陈嵘杰,刘立程,王峰.军用无人机现状及发展趋势[J].电脑知识与技术,2018,14(08):250-251
[2]王鑫. WPF技术在无人机地面控制站中的应用 [M]. 北京理工大学, 2015
[3]王媛娇,孙恺,等. 基于WPF技术的行情分析软件设计与实现[M]. 电子设计工程, 2014(18):20-22
[4]袁玉敏. 农业植保无人机高精度定位系统研究与设计-基于 GPS 和 GPRS[J]. 农机化研究, 2016(12):227-231.
[5]李小磊. 无人机任务规划软件设计与实现[D]:[硕士学位论文]. 电子科技大学, 2014.
[6]Jiehong Wu, Liangkai Zou, Liang Zhao, Ahmed Al-Dubai, Lewis Mackenzie, Geyong Min. A multi-UAV clustering strategy for reducing insecure communication range[J]. Computer Networks, 2019, 158: 132-142.
[7]李世川. 搭建ASP.NET開发平台[J]. 网络运维与管理, 2015(1):122-123.
[8]屈武江. 串口数据采集系统在VS2008中的设计与实现[J]. 沈阳师范大学学报(自然科学版), 2013, 31(3):409-412.
