质量偏心对航空渐开线花键副非线性动态啮合力的影响
2021-06-07薛向珍霍启新李文贤
薛向珍, 霍启新, 李文贤, 刘 健
(1.西北工业大学 力学与土木建筑学院, 陕西 西安 710072; 2.陕西科技大学 机电工程学院, 陕西 西安 710021; 3.中车唐山机车车辆有限公司, 河北 唐山 064000)
0 引言
渐开线花键副作为航空主减速器中的关键零部件之一,其可靠性对动力传输系统的安全起决定性作用.理想状态下,航空渐开线花键副应无任何相对运动,但由于其受载形式特殊,在起飞、巡航、着陆时都受到较大的动载荷作用,使得航空渐开线花键副系统的弯-扭耦合非线性振动非常强烈.这种非线性振动会引起系统动载系数增大,影响键齿载荷分配、分布,极大的增加了系统动态力,从而导致键齿面接触和弯曲疲劳失效概率增加,更重要的是会导致航空花键副系统磨损失效严重[1-4],甚至造成灾难性事故.故航空渐开线花键副非线性动态啮合力的研究意义重大.
近年来,对于航空渐开线花键副的研究大多聚焦在其动力学特性的研究上.国外,Walton等[5]研究了外力和频率对角刚度和阻尼系数的影响,角刚度和阻尼系数被用来进行线性稳态转子动力学的稳定性分析.Kahraman[6]在考虑齿侧间隙的情况下推导出渐开线花键副齿侧间隙方程并建立了渐开线花键副动力学方程.
在国内,对航空渐开线花键副转子系统振动特性的研究则较多些[7-9].其中最具代表性的是以赵广等[10-12]为主建立了完整的转子联轴器轴承隔振器系统研究体系.从耦合部件建模、到整个系统建模;从对该系统的理论分析、数值仿真到实验验证,开展了深入的研究工作.同时,以杨国林、高腾等[13,14]为主,对轴系角度不对中径向振动特征进行了分析.
而专门针对航空花键副动态啮合力的研究还相对较少,且由于铸造和加工误差的存在,导致航空渐开线花键副运行过程中存在一定的质量偏心及侧隙.近几年通过大量对花键副工程中的磨损失效件分析,发现在其运行过程中存在的质量偏心对其磨损影响较大,花键副动态啮合力是磨损预估进而进行其精准设计的基础.
因此,本文以某型航空渐开线花键副为研究对象,建立其弯扭耦合非线性动力学模型,考虑花键副的多齿啮合行为进行航空渐开线花键副非线性动态啮合力研究,并分析了不同质量偏心对花键副动态啮合力及力矩的影响规律,为设计高可靠性、高精度以及高寿命的航空渐开线花键副奠定了良好的理论基础.
1 动力学模型及动态啮合力分析
1.1 动力学模型
图1为航空渐开线花键副弯-扭耦合非线性系统动力学模型示意图.该图各轴的轴线沿z方向,本文未考虑内、外花键之间的轴向作用力,因此二者的相互作用仅在xoy平面上体现.系统的扭矩Td经原动机传递到外花键,带动内花键在一定负载TL下按一定速度旋转.本文在x、y方向考虑了内、外花键的支承,图中各物理量的符号及含义如表1所示.
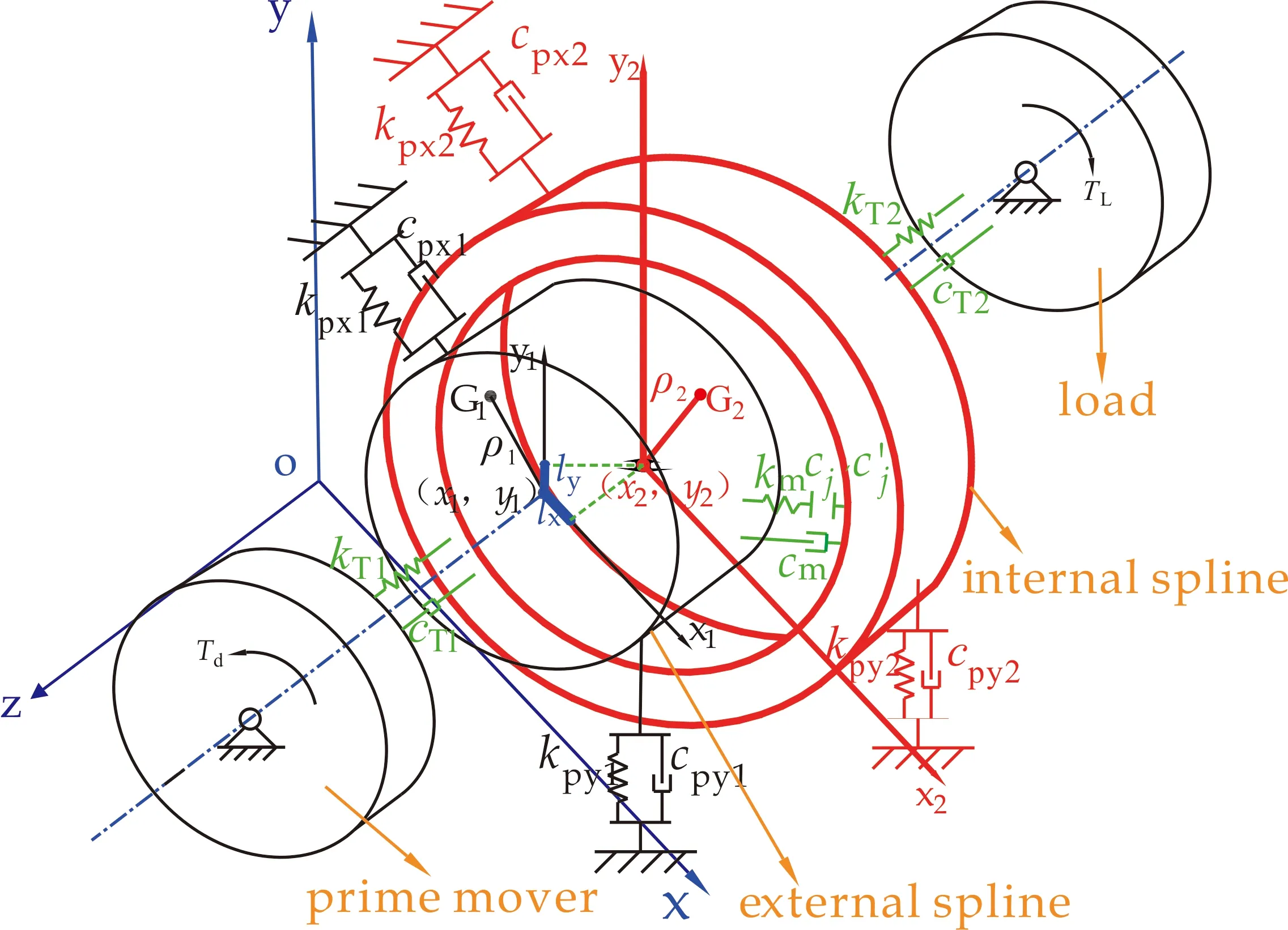
图1 动力学模型示意图

表1 物理量符号及含义
在图1中,点Gu代表内、外花键的质量偏心位置,ρu代表二者的质量偏心量.(xu,yu)为内、外花键的形心坐标,在运行过程中,内、外花键的形心因振动而未与o点重合.
1.2 系统动态啮合力分析
Δnj(t)=Δn2(t)-Δn1(t)+rb(θ2-θ1)=
(x1-x2)sinφj-(y1-y2)cosφj+rb(θ2-θ1)=
(x1-x2)sinφj-(y1-y2)cosφj+Δ2
(1)
式(1)中:定义外花键在某一时刻某一个齿的转角为θj:
(2)

其次,定义工作齿廓侧线(假定工作齿廓侧线为直线,即将花键齿简化为梯形齿)与x方向的角度为φj,φj=θj-α0.
对单齿位移公式(1)求导,得到单齿速度公式:
(3)
本文的模型考虑了啮合刚度和和啮合阻尼,因此单齿啮合力为接触力fci和阻尼力fdj的和.分别如下:
(4)
(5)

故单对齿沿啮合线的啮合力Fnj为:
Fnj=fcj+fdj
(6)
综上所述,将单对齿的沿啮合线的啮合力离散求和,求出所有齿总的啮合力,将其沿坐标轴分解即得到沿x轴、y轴分量;总的啮合力矩计算过程为将单对齿的沿啮合线的啮合力离散求和后乘以基圆半径rb,即:
(7)
2 动力学方程
由本文的动力学模型可知,原动机和负载绕固定的轴旋转,x、y方向假定不发生横向振动,其旋转角度分别为θM、θL;由于考虑了外花键和内花键支撑作用,故在x、y方向内外花键具有横向振动位移xu、yu,同时具有扭转位移θu.由于原动机-外花键-内花键-负载之间考虑了扭转和啮合作用,因此各旋转角度均不相同.本文以上述变量为花键系统的自由度,根据拉格朗日方程进行微分方程的推导.拉格朗日方程的基本形式为:
(8)
方程(8)中:qn为广义自由度;Fn为系统的广义力;Ek为花键系统的动能;Ep为势能;ER为系统的能量耗散函数;n为系统的自由度数.
以外花键处为例,依次列出其动能、势能及能量耗散函数,有(内花键处公式与之类似,不再说明):
(9)
(10)
(11)
将内外花键处的动能势能及能量耗散相加,有:
(12)
在本文中,Fn包括内外花键总啮合力沿坐标轴方向分力、啮合力矩、驱动力矩、阻力矩、重力、以及耦合惯性力.将上述公式代入方程(8)中,经推导化简可得花键副系统动力学方程为:
(13)

(14)
其中:
3 质量偏心对非线性啮合力的影响
3.1 求解方法和参数取值
本文求解方法采用四五阶变步长龙格-库塔法,其在matlab中对应的命令为ode45.
龙格-库塔法是一种被广泛应用于求解常微分方程的数值求解方法,求解精度较高,能自动起步,只需规定初始条件,后续的计算也可逐步完成.
四阶龙格库塔法的迭代公式为:
(15)
文章采用的动力学参数如下:
当渐开线花键副的齿数为22,压力角为30 °,模数为2.5 mm时,各动力学参数计算方法详见文献[15-18],具体方程求解时的动力学参数值如表2所示.负载TL取28 N·m(轻载条件),根据能量损耗关系,得出驱动力矩Td=30.67 N·m.不对中量取2×10-4m.输入转速n取为6 400 r/min.
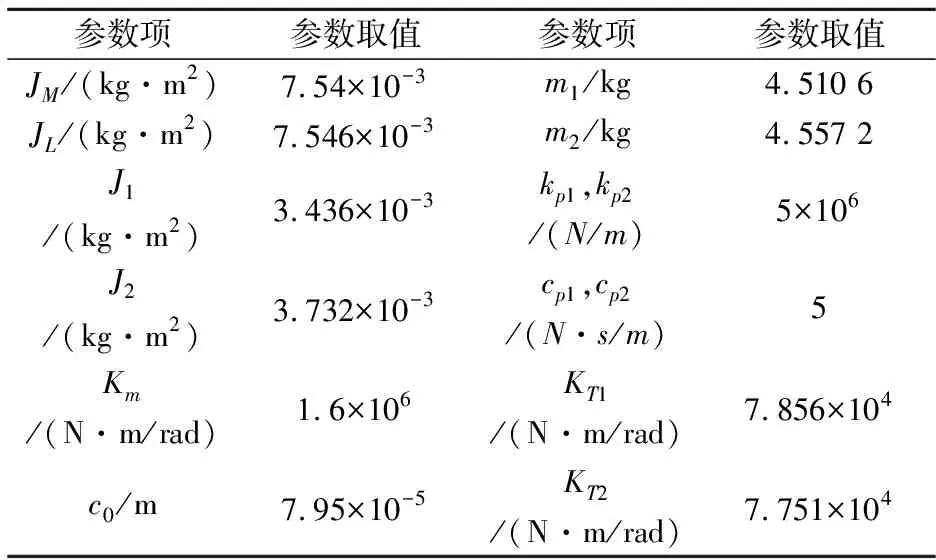
表2 某航空渐开线花键副动力学参数
3.2 求解结果
系统的非线性动态啮合力随质量偏心变化情况如图2~9所示.
取内花键质量偏心量0不变,依次改变外花键质量偏心量,得出外花键处的啮合力、啮合力矩情况.由于内、外花键啮合力为互为作用力和反作用力的关系,因此本文只分析外花键的受力(篇幅所限,只分析其x方向的分力变化情况).
图2(a)、(b)为质量偏心0,外花键齿上总的啮合力沿x方向分力及其频谱.可以看出,质量偏心为0时,在x向不对中作用下产生的总的啮合力沿x方向分力近似为一定值437.7 N.且对应的频谱无较为明显的频率分量.
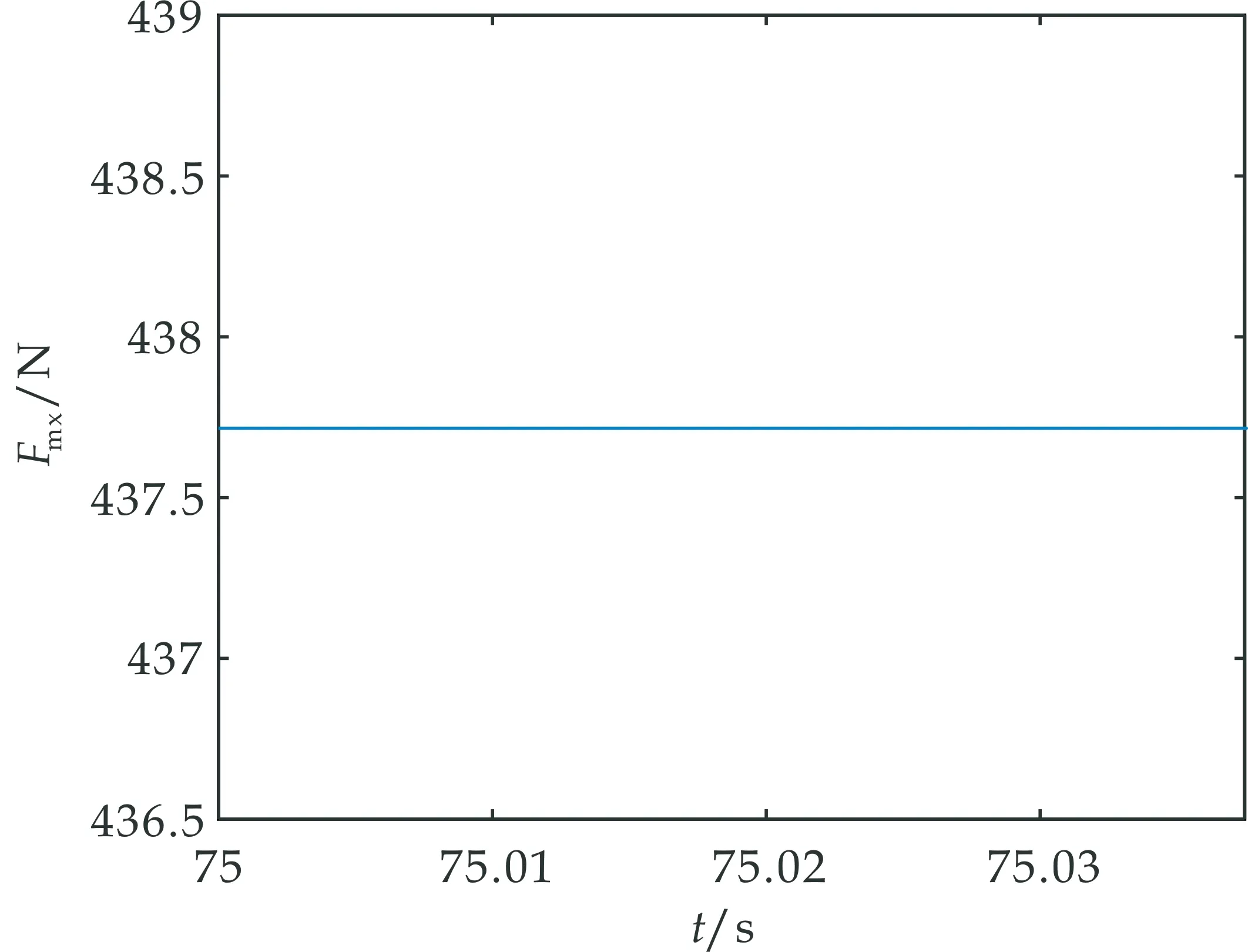
(a)外花键各齿上总的啮合力沿x方向分力
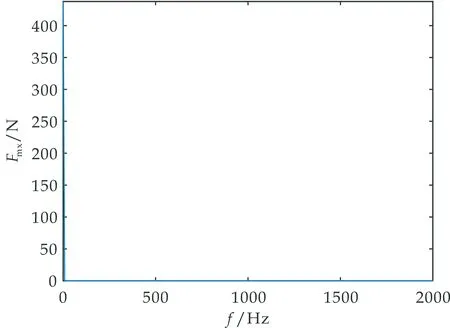
(b)外花键各齿上总的啮合力沿x方向分力频谱图2 质量偏心为0时外花键处啮合力情况
图3为无质量偏心的动载系数变化情况.由图可以看出,动载系数变化幅度较小,基本稳定在0.957 17上下.

图3 质量偏心为0时花键副动载系数
图4、图5为花键副在质量偏心为3×10-4m时花键受载情况.由图4(a)、(b)可以看出,在质量偏心为3×10-4m的条件下,外花键齿上总的啮合力沿x方向分力波动幅度发生了很大的变化,在175~735 N之间波动,对应的频谱出现了一个较大的频率分量,其值为109.4 Hz,接近于工作频率(6 400/60=106.67).在320~532 Hz的频段范围内同样也出现了小的“锯齿”.
由图5可以看出,在质量偏心为3×10-4m时,动载系数变化幅度较之前无质量偏心时增大,波动范围为0.92~0.99.
(a)外花键各齿上总的啮合力沿x方向分力

(b)外花键各齿上总的啮合力沿x方向分力频谱图4 质量偏心为3×10-4 m时外花键处啮合力情况

图5 质量偏心为3×10-4 m时花键副动载系数
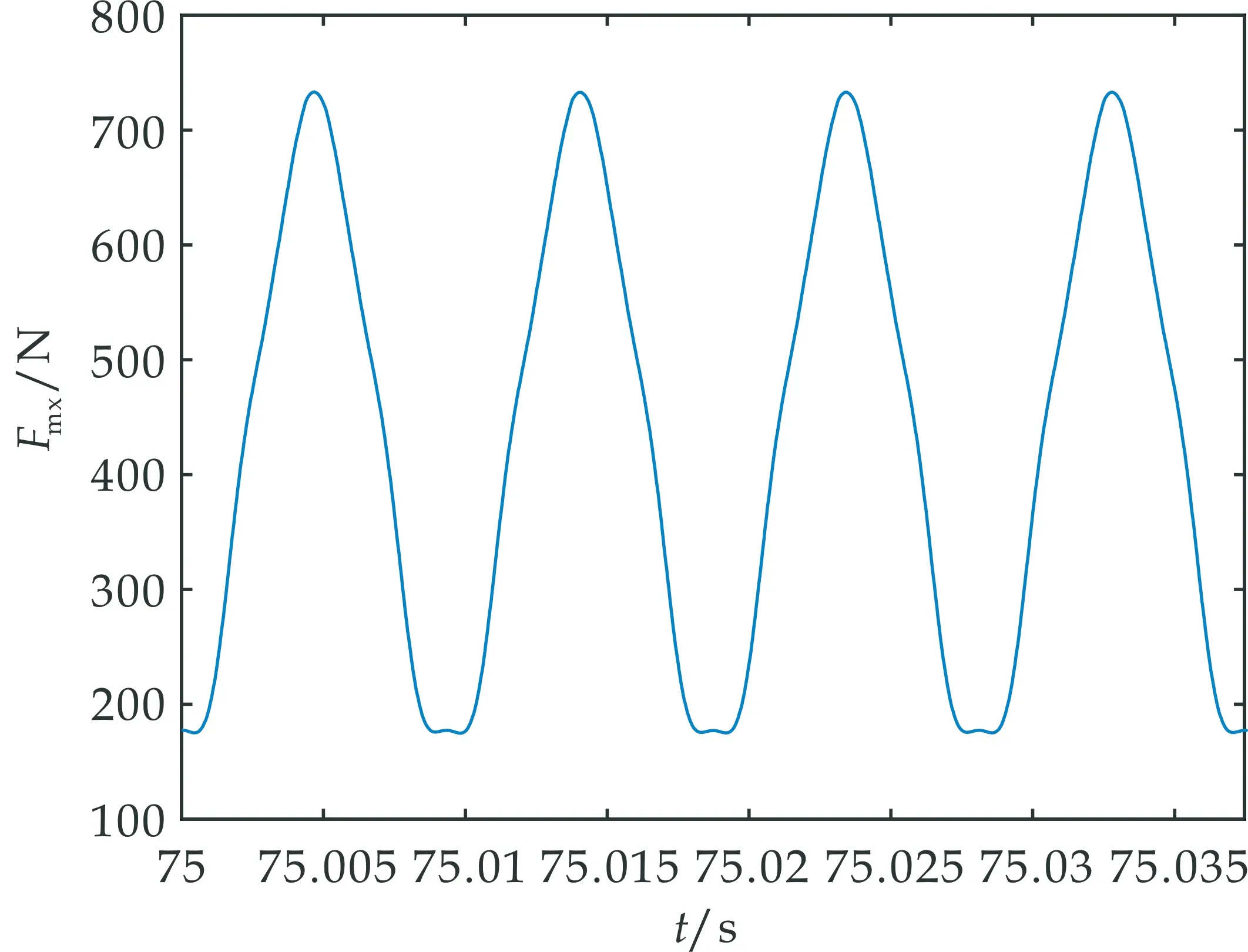
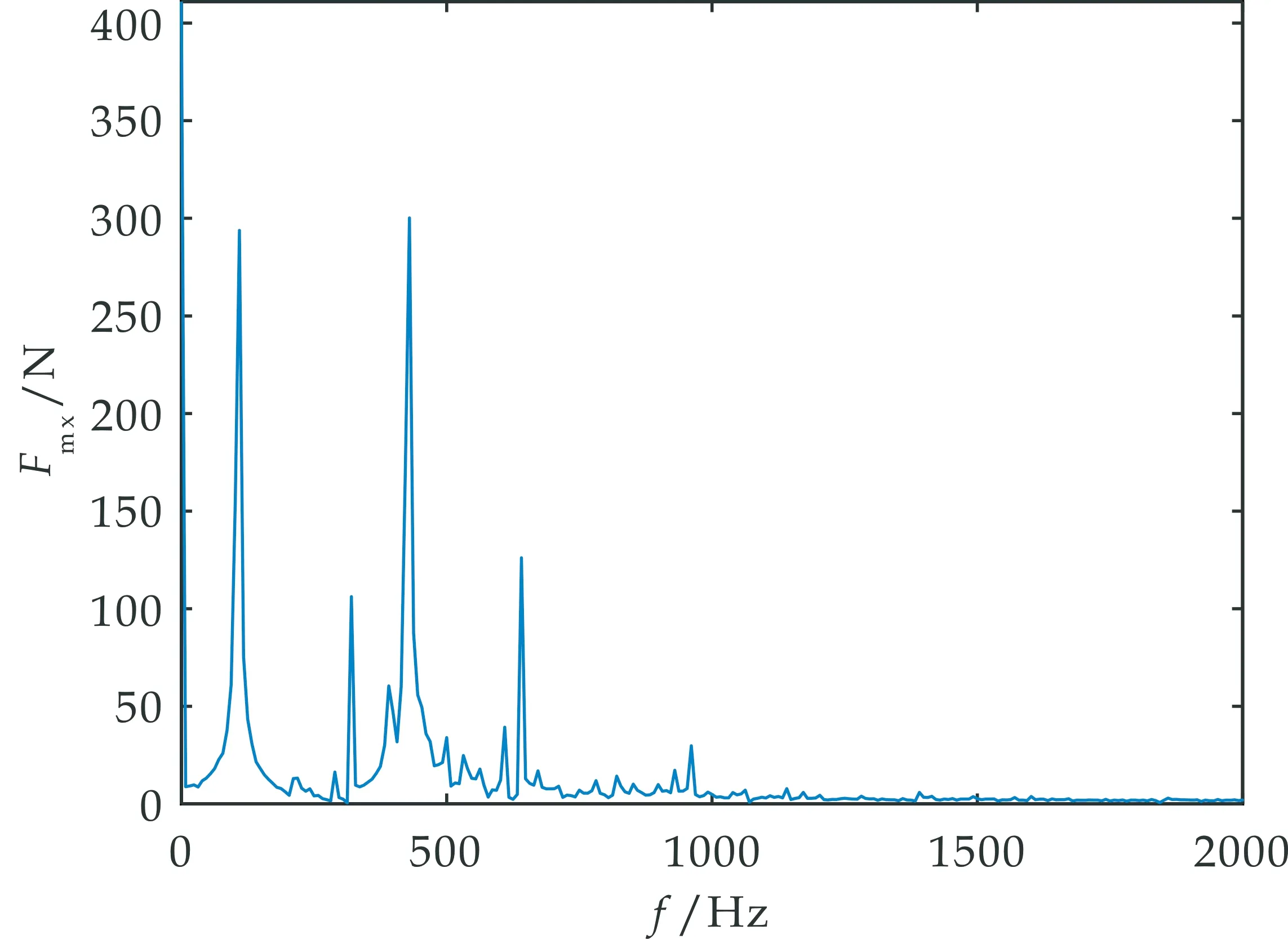
图6、图7为花键副在质量偏心为3.5×10-4m时花键受载情况.由图6(a)、(b)可以看出,在质量偏心为3.5×10-4m的条件下,外花键齿上总的啮合力沿x方向分力及其频率的最大幅值增大,其频谱中能够较为明显的看到三个幅值十分小的分量,对应的频率分别为320.3 Hz、421.9 Hz、531.2 Hz.这些频率分量近似满足工作频率的倍数关系,但其数学关系并不是十分精确,推测可能由于本文研究的模型中内外花键的相对约束较弱,并不像一般意义上的联轴器或转子系统那样两段轴之间有外壳的强迫作用,导致倍频特性较为明显.
图7中的动载系数波动也随之增大,波动范围为0.87~1.04,说明系统运转逐渐变得不稳定.推测出现动载系数变大和啮合力高频分量的原因可能为:质量偏心的增大导致花键系统运行时所受惯性力增大,进而使得花键振动增大,该振动的频率因质量偏心的存在而以一倍工作频率为主,高频分量则是由于花键在运行过程中单位时间内各齿的啮合对数以及每对齿的啮合次数均随振动的增大而增加,反映到频谱上即为高频分量的出现并增大.

(a)外花键各齿上总的啮合力沿x方向分力

(b)外花键各齿上总的啮合力沿x方向分力频谱图6 质量偏心为3.5×10-4 m时外花键处啮合力情况

图7 质量偏心为3.5×10-4 m时花键副动载系数
图8、图9为花键副在质量偏心为4×10-4m时花键受载情况.图8(a)与图6(a)相比,总的啮合力沿x方向分力最大幅值增大,且力的方向出现了相反的情况.图8(b)中出现了多个倍频分量.
图9中花键副动载系数继续增大,甚至最大值达到了2.15左右,花键的状态已变得混沌且不可控,严重影响了花键受载的程度,易造成花键齿的失效乃至威胁相关人员的生命安全.

(a)外花键各齿总的啮合力沿x方向分力
(b)外花键各齿上总的啮合力沿x方向分力频谱图8 质量偏心为4×10-4 m时外花键处啮合力情况

图9 质量偏心为4×10-4 m时花键副动载系数
图10为外花键处总啮合力沿x方向分力随花键质量偏心量的分岔图.由图可以看出.总啮合力沿x向分力的变化大致分为5个阶段,分别为:质量偏心量为0时,啮合力呈单周期状态;偏心量区间:(0,2.2)×10-4m——2周期状态;偏心量区间:[2.2,2.4]×10-4m——多周期状态;偏心量区间:[2.5,3.1]×10-4m——2周期状态;偏心量区间:[3.2,3.7]×10-4m——4周期状态;偏心量区间:[3.8,-]×10-4m——混沌状态.
结合图2~9,其各自对应的质量偏心量位于图10相应的状态区间内.因篇幅所限,图2~9未涉及的状态未加以列出.
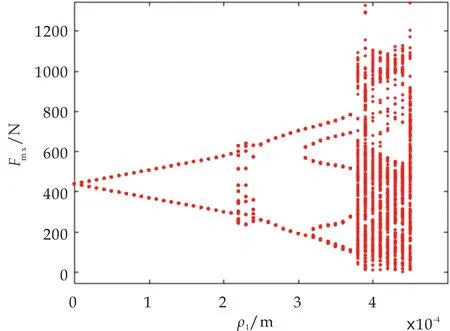
图10 外花键处总啮合力沿x方向分力随质量偏心量的分岔图
4 结论
本文以某航空渐开线花键副为研究对象,建立了其弯-扭耦合非线性动力学模型及方程,并采用数值法分析了质量偏心对航空渐开线花键副非线性动态啮合力及动载系数的影响,由此得出:
质量偏心对花键法向啮合力沿x向分力及动载系数均有影响.随质量偏心量的增大,上述物理量的幅值和波动范围均有不同程度的增大,由动载系数可以看出,花键系统的运行状态随偏心量的增大而越发地不稳定;在频谱方面,随质量偏心的增大,各物理量的频谱在高频处的频率分量出现并增大,推测可能由于质量偏心的增大导致花键运行时单位时间内各齿的啮合对数以及每对齿的啮合次数(频率)增加,进而影响了频谱中的高频部分;各频率分量近似满足倍频关系,最低频率近似等于一倍回转频率,但并不是十分精确的数学关系,推测可能由于本文模型涉及到的花键之间约束较弱,且花键为多齿啮合问题,在运行过程中各齿的脱出与啮合并不满足严格的规律,从而对最终啮合力的频率造成了一定的影响.
