离心泵虚拟训练及拆装平台设计
2021-06-07韩中建
韩中建
(武警海警学院机电管理系,浙江 宁波 315801)
0 引言
近年来,随着计算机技术、信息技术以及其他技术的进步,虚拟现实技术也实现了迅猛发展,它在各个领域中的应用都取得了显著突破,并逐渐成为新的学科领域。虚拟现实技术因具有沉浸性、交互性以及构想性等特点受到教育工作者的青睐,并通过各种方式的开发应用使其成为促进教育发展的一种新型手段。相对于传统教学,虚拟现实技术能通过计算机将原本抽象复杂的知识转化为实时、动态且可交互的三维立体场景供学生学习、观摩和操作,从而打破设备、时间以及场地的限制,大大提高了教学的灵活性、经济性和安全性[1]。离心泵作为一种通用的流体机械,它具有结构紧凑、流量平稳、震动较小、适应性强以及维护费用低等特点,被广泛应用于社会生产生活的各个领域[2]。基于离心泵的工作原理、结构组成以及使用维护等知识点的教学一直是机械类专业教学的重要组成部分,利用虚拟现实技术可以使该部分知识更加灵活方便地供学生学习,对创新教学手段、提高教学质量有重要的现实意义[3]。
该文所述的离心泵虚拟训练及拆装平台是以IS50-32-125B型卧式离心泵为仿真对象,采用Unity 3D作为开发引擎,结合3ds Max等软件进行离心泵操作平台场景建模和拆装动画的制作,能实现离心泵启动停止、压力调节、流量监控、故障显示、爆炸拆解、分步拆装以及自由拆装等功能,还可以用于辅助离心泵相关理论的教学工作。
1 平台场景构建
离心泵虚拟训练及拆装平台系统如图1所示,主要由离心泵、电机、控制箱、吸入阀、排出阀、流量计、进出口压力表、进口止回阀、水箱以及相应的管路组成。平台场景构建主要分为离心泵机组建模、管系附件建模和环境建模3个部分。
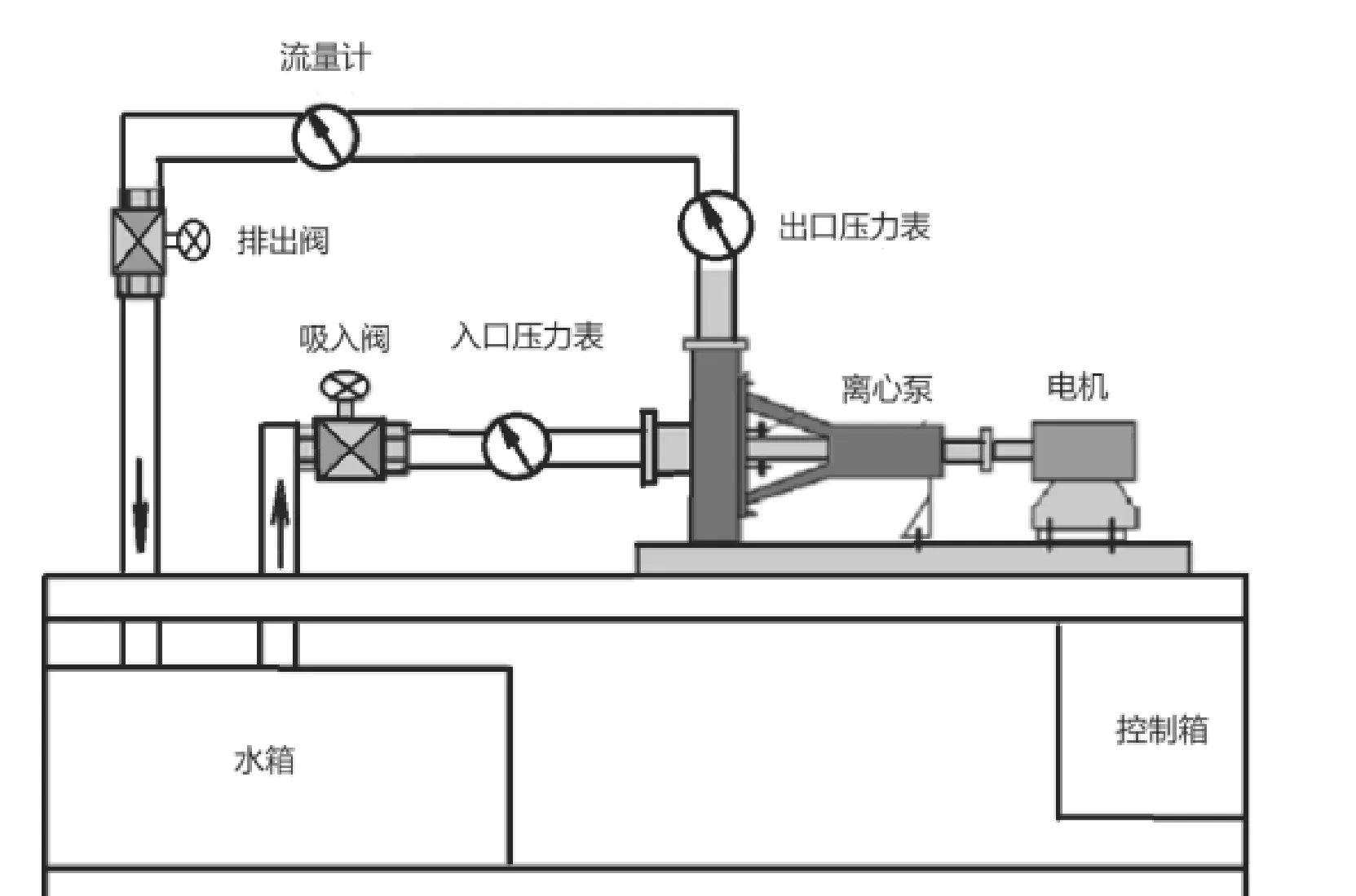
图1 离心泵虚拟训练及拆装平台系统组成
1.1 离心泵机组建模
离心泵机组建模是根据IS50-32-125B型卧式离心泵各零件的实际尺寸进行建模的,要求能清晰完整地表达各零件的外形及装配管系。以泵壳为例,首先用标准几何体里面的圆柱体进行建模,其次通过对可编辑多边形的顶点、边、边界、多边形以及元素的修改建成大体模型,最后使用涡轮平滑处理建成该泵壳,模型效果如图2所示。
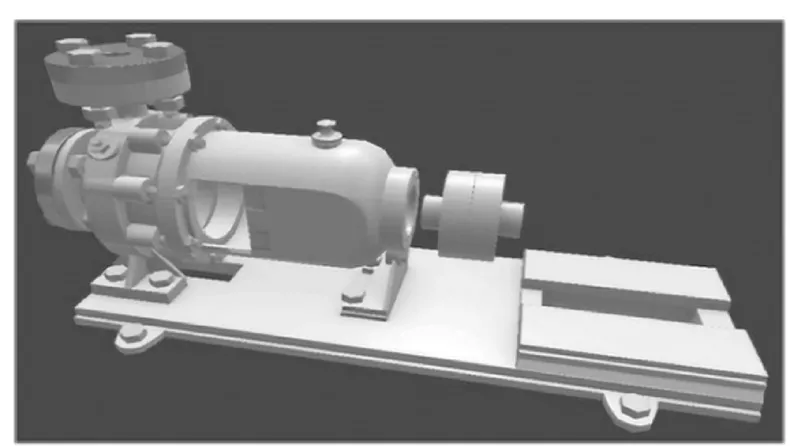
图2 离心泵机组模型
1.2 管路附件建模
管路附件建模共分为4个小部分,分别为进出口管路、进出口阀门、流量计和压力表。以排出阀为例,首先对排出阀主体进行建模,运用多边形建模功能对规律的模型进行创建;其次,运用手动挤出的操作方式对不规则的多边形进行编辑;最后,根据具体的结构进行等比例建模。模型建成后,运用倒角操作对零件的轮廓进行处理。
1.3 虚拟训练环境建模
为了模拟逼真的虚拟训练环境,平台构建1个虚拟实验室场景。该虚拟实验室主要包括墙体、门窗、黑板、地面以及灯光等。虚拟训练环境建模效果如图3所示。
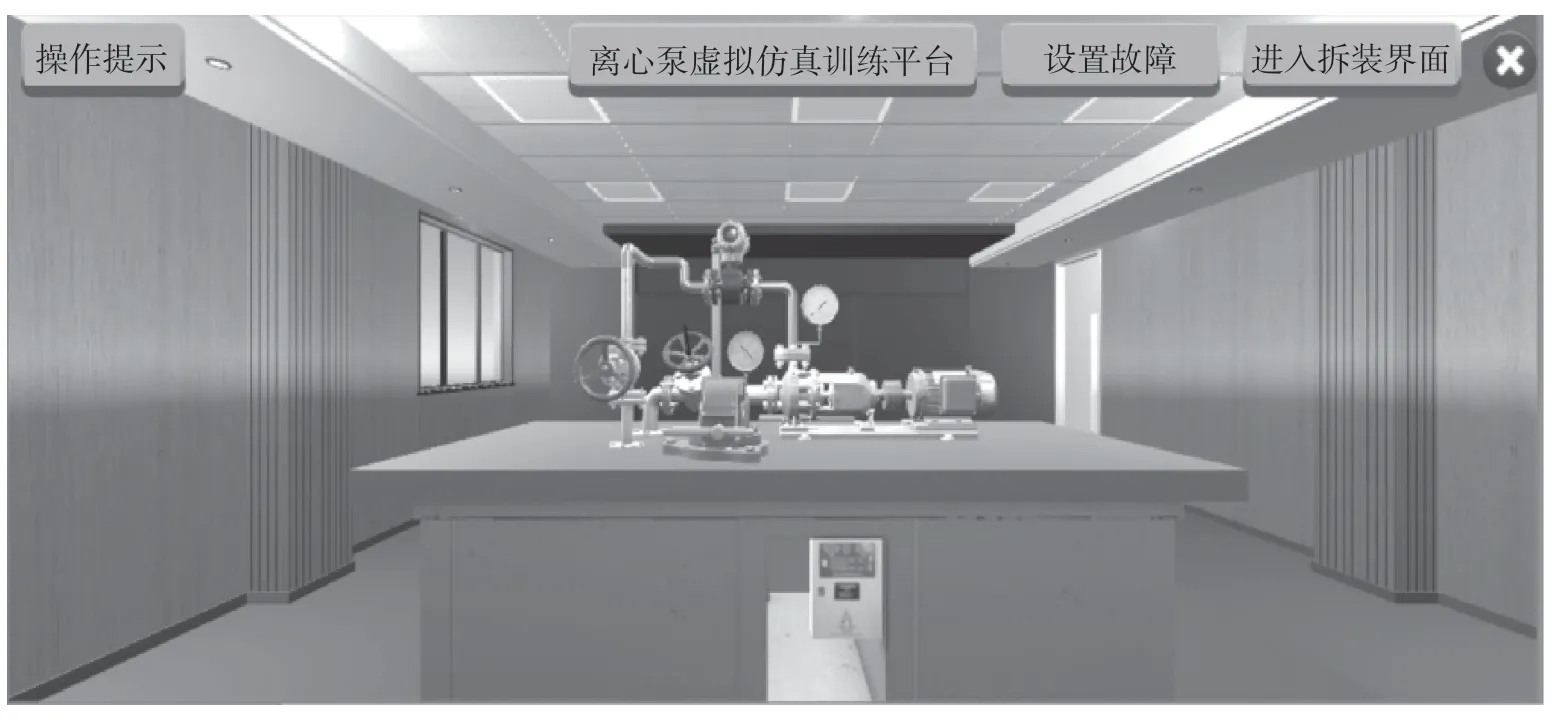
图3 虚拟训练环境
2 训练功能实现
该文设计的离心泵虚拟训练及拆装平台具有离心泵启动运行、状态监控、流量控制以及故障排除等功能,主要模拟对象包括主电源开关、工作电压电流监视、监控面板、电机运行、阀门控制以及仪表显示等。
2.1 模拟工作流程
该文设计的离心泵虚拟训练及拆装平台的模拟工作流程如下:1)单击主电源开关给平台供电,显示电压电流运行数值和运行状态监控。2)逆时针旋转进口阀门手轮,打开进口阀,顺时针旋转出口阀门手轮,关闭出口阀。3)单击引水旋塞给离心泵加入引水。4)单击智能启动按钮启动离心泵机组,观察进出口压力表的指针。5)逆时针逐步旋转出口阀门手轮,观察进出口压力表的指针。6)单击停止按钮停止离心泵机组,观察进出口压力表的指针。7)顺时针旋转进口阀门手轮,关闭进口阀,顺时针旋转出口阀门手轮,关闭出口阀。8)单击主电源开关,停止平台供电。
离心泵虚拟训练及拆装平台软件运行流程如图4所示。
2.2 电压电流模拟监视功能
平台的电压电流模拟监视功能是利用Unity 3D引擎中的TextMesh组件模拟并控制数码管运行动画,从而实现显示平台工作电压和电流运行数值的功能。
平台模拟工作电压数码管运行现象如下:1)主电源接通前,数码管不显示。2)电源接通后,工作电压为395 V~405 V内的随机数值。3)数码管数值每秒都会产生变化。
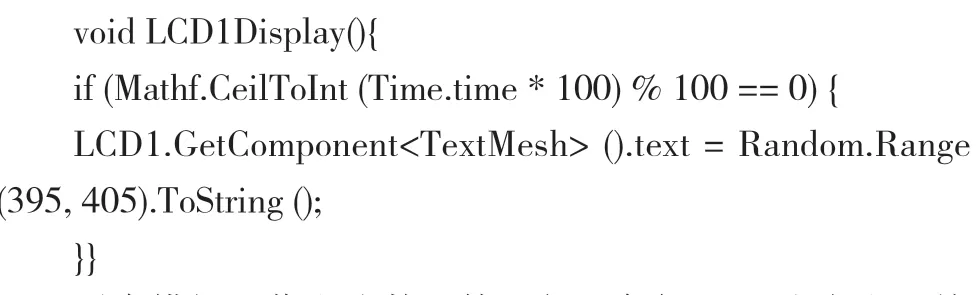
平台模拟工作电流数码管运行现象如下:1)主电源接通前,数码管不显示。2)电源接通后,工作电流为0 A。3)在电机启动后,工作电流逐渐升高。4)当达到额定工况后,稳定在额定电流附近。5)工作电流还随进出口阀门开启大小发生变化。
其关键运行脚本如下。
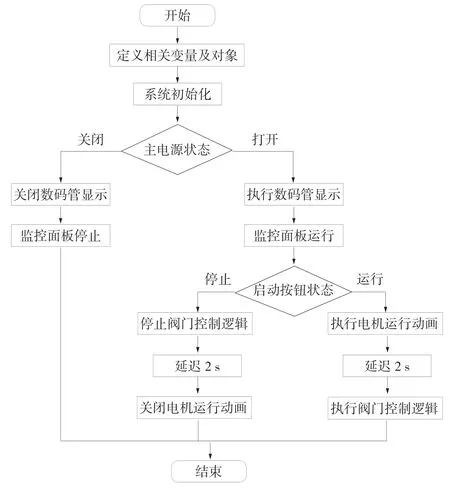
图4 软件运行流程
2.3 进出口阀门控制功能
进出口阀门的开度对离心泵进出口压力的影响是离心泵训练的重要内容之一。根据离心泵的运行特性及实际工作情况,该平台设计模拟的运行现象如下:1)当离心泵机组停止工作时,进出口压力表指针显示为0 MPa,不随进出口阀门的操作发生变化。2)当启动离心泵机组时,因为进口阀门处于打开状态、出口阀门处于关闭状态,所以进口压力指针逐渐降低至-0.02 MPa,出口阀迅速升高至0.2 MPa。3)在离心泵机组运行时,当朝顺时针方向旋转进口阀门时,进口压力表指针逐渐降低至-0.08 MPa;当朝逆时针方向旋转出口阀门时,出口压力表指针逐渐降低至0.08 MPa。
训练软件通过单击进出口阀门手轮两侧空对象碰撞体,从而控制手轮和压力表指针,Rotation属性模拟进出口阀控制功能,其关键运行脚本如下。
3 拆装功能实现
离心泵拆装是工程训练课程机械拆装实训模块中的一个重要项目。根据离心泵的结构原理和拆装要点,该文设计的离心泵虚拟训练及拆装平台设置有自由拆装、自动拆装、爆炸拆解、分步拆装以及拆装要点提示等功能,能实现不同拆装模式的自由切换。
3.1 自由拆装模式
在自由拆装模式下,学生能够将离心泵机组各零件拖动至任意位置进行拆解,并可以通过改变视角来观察零件的结构特征。当学生鼠标选中需要组装的零件时,在该零件原位置高亮显示零件轮廓,然后将零件拖动到轮廓附近,零件就能回到原有位置。
3.2 自动拆装模式
自动拆装模式主是为了让学生对离心泵的详细结构组成及正确的拆装顺序有初步了解,在该模式下,可以控制动画播放的快慢,也可以随时停止播放。
3.3 爆炸拆解模式
爆炸拆解模式是为了让学生迅速了解离心泵各零件的名称和结构特点。在该模式下通过UI界面按钮控制,使离心泵各零件以主轴为中心,成爆炸分布到周围位置。当鼠标悬停在零件上2 s,就会显示所选零件的名称及基本信息。
3.4 分步拆装模式
分步拆解模式的主要目的是使学生清晰掌握离心泵拆装顺序和操作要领。该模式是通过脚本控制事先准备好的Animtor动画组件,进而控制动画的播放顺序和视角的转换。学生单击UI界面上“上一步”、“下一步”按钮,实现离心泵机组各零件反复拆解演示,并在界面左上角显示拆装要点提示。分布拆装运行效果如图5所示,其关键运行代码如下。
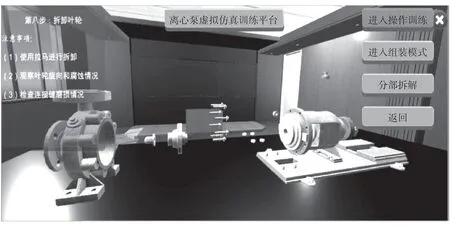
图5 分布拆装运行效果


4 结语
离心泵虚拟训练及拆装平台利用虚拟现实技术以立体、生动以及可交互的形式将离心泵的工作原理、机械结构组成、拆装方法以及拆装要领等抽象的知识点展现出来,初步达到了提升教学效率和教学质量、培养学生工程意识、动手操作能力以及创新思维的目的。平台的设计是将虚拟现实技术与实践教育结合的具体实践,为离心泵实践教学提供了新型且高效的教学手段,值得进一步研究和应用。
