压电宏纤维致动器的双极性非对称迟滞建模及补偿控制
2021-06-06徐金秋娄军强杨依领陈特欢马剑强崔玉国
徐金秋 娄军强 杨依领 陈特欢 马剑强 崔玉国
摘要: 提出了一种双极性非对称改进PI(Bipolar Asymmetric Improved PI, BAIPI)模型描述压电宏纤维(Marco Fiber Composite, MFC)的迟滞特性,BAIPI模型利用经典Prandtl?Ishlinskii(PI)迟滞模型Play算子加权叠加描述MFC的对称迟滞特性,然后叠加一系列不同权重、不同阈值的双边死区算子描述MFC的双极性非对称特性。实验辨识结果表明:BAIPI模型对MFC致动器的建模误差从PI迟滞模型的16.8%降为4.2%。在基于BAIPI逆模型的前馈补偿下,MFC致动的柔性梁构件跟踪等幅、变幅三角波轨迹的实测位移与期望跟踪位移基本重合,补偿后等幅三角波实测位移与理想位移之间的线性度为2.36%。因此,所提出BAIPI迟滞模型及补偿方法显著提高了MFC致动器的定位驱动和跟踪精度。
关键词: 迟滞; 压电宏纤维; 双极性非对称改进PI模型; 双边死区算子; 前馈补偿
中图分类号: O322; TP273; TN384 文献标志码: A 文章编号: 1004-4523(2021)01-0159-07
DOI:10.16385/j.cnki.issn.1004-4523.2021.01.018
引 言
作为智能材料典型代表的压电材料具有分辨率高、响应速度快、频响范围宽且可靠性高等优点,在精密柔性构件的变形控制、空间柔性结构的主动抑振及微纳平台的精密定位等领域得到了广泛应用[1?2]。尤其是近年来美国宇航局基于指叉电极技术发明的压电宏纤维复合材料(Marco Fiber Composite, MFC),克服了传统压电陶瓷片在韧性方面的不足,能够提供更大的驱动应变、柔韧性和更好的变形能力[3]。Henry等[4]提出了一种MFC致动的智能蒙皮技术,实现了小型无人机机翼的主动变形控制。Shahab和Erturk[5]研究了MFC致动的水下仿生机器鱼的游动性能。Li等[6]采用MFC致动器实现了智能锥壳结构的主动精密隔振控制。因此,MFC致动器在柔性主动变形及精密驱动领域具有广泛的应用前景。
压电致动器利用压电材料的逆压电效应完成电能到机械能的转换,实现纳米级分辨率的精密驱动。但是压电材料固有的铁电特性导致其输入信号与输出位移之间存在着复杂的迟滞非线性特征。压电致动器的迟滞特性严重影响了系统的定位精度,易产生振荡,甚至带来系统不稳定的后果[7]。对于MFC致动器而言,指叉电极技术允许MFC致动器可以工作在d33模式,从而获得比常规d31模式更大的致动能力[8]。但是大的致动能力伴随着高的驱动电压,导致MFC致动器的驱动电压可高达1500 V,进而带来比传统压电陶瓷致动器更为严重的迟滞非线性特性。同时,MFC本身的多种材料复合结构也导致其非线性要显著高于常规的压电陶瓷材料。Bilgen等[9]采用经典的Preisach迟滞模型来描述MFC致动的柔性悬臂梁结构的迟滞行为,模型预测误差达9.3%。Chen等[10]提出改进Preisach迟滞模型,采用两条一阶回转曲线分别描述MFC致动器迟滞环的上升和下降阶段。由于Preisach模型存在着模型参数计算量大、求逆复杂的缺点,Yang等[11]采用模型参数少且求逆方便的Bouc?Wen迟滞模型描述MFC致动结构的迟滞特性。Schr?ck等[12]采用Prandtl?Ishlinskii(PI)迟滞模型描述了MFC致动的悬臂梁结构迟滞非线性输出位移,发现悬臂梁结构在双极性驱动电压下的输出位移幅值存在着偏置现象。Wilkie等[13]对MFC致动器的自由应变测试结果发现MFC致动器的等效压电应变常数大小与驱动电场极性有关。Zheng等[14]的实验测试结果表明:在正、负驱动电压下,MFC致动器(M2814?P1)的等效压电应变常数d33分别为3×10-10和4.53×10-10m/V,二者具有较大偏差,从而导致MFC的致动能力在正、负极性的驱动电压下有着显著不同。显然,MFC致动器的驱动电压?响应位移之间存在着严重的双极性非对称迟滞非线性,为了提高整个系统的驱动定位精度和控制效果,势必要改进常规的基于对称算子的迟滞模型,提出MFC致动器的双极性非对称迟滞模型,并设计相应的补偿控制方法。
本文搭建了MFC致动的柔性梁构件实验系统,测试得到了柔性构件的末端振动位移与MFC致动器驱动电压之间的双极性非对称迟滞特性。在经典PI迟滞模型基础上,通过叠加一系列双边死区算子,提出了描述MFC致动器迟滞现象的BAIPI迟滞模型,并给出了对应逆模型的求解过程。通過最小二乘法辨识得到BAIPI正、逆模型的特征参数。最后进行了迟滞模型拟合和位移跟踪补偿控制实验,证实了所提出的BAIPI迟滞模型和补偿控制方法的有效性。
1 MFC致动的柔性梁构件系统搭建
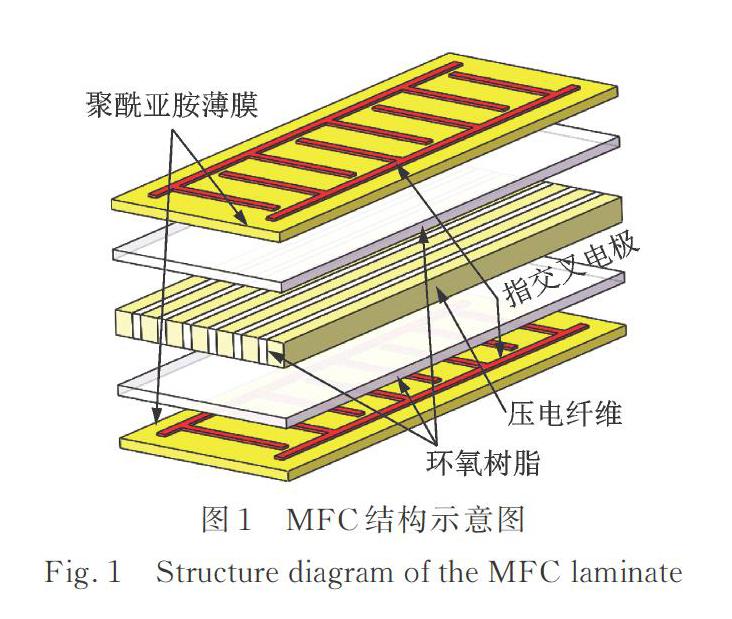
压电宏纤维复合材料是由美国宇航局Langley中心研发的一种新型纤维基压电复合材料,其结构组成示意如图1所示。MFC中结构环氧树脂的加入提升了整个复合结构的柔韧性、可靠性和变形能力,而指叉电极(Interdigitated Electrodes, IDE)的排布方式大幅提高了压电材料的应变致动效率。较传统的压电陶瓷片而言,MFC的变形和驱动能力显著增强。因此,MFC致动器是柔性结构主动变形、驱动控制及振动抑制的较为理想元件。
柔性梁构件作为柔性结构的典型代表,在航空柔性机械臂、柔性机器人及精密柔顺定位机构中均有广泛应用。为了测试MFC致动器的致动性能,搭建MFC致动的柔性梁构件实验系统,其结构框架如图2所示。采用环氧树脂胶水3M?DP60将两片MFC致动器(Smart Material,型号M2814?P1,工作模式d33)对称地粘贴在铝基柔性梁构件根部的上下表面。梁构件及MFC基本参数如表1所示。测试过程中,PC机通过USB总线将MFC致动器的控制电压信号传输到多槽嵌入式USB CompactDAQ机箱(NI, cDAQ?9178),然后经D/A模块(NI AO9263)转换为模拟电压信号,该电压信号经高压放大器(Trek PZD700A,放大倍数200)放大后施加到MFC致动器上,MFC致动器在压电材料逆压电效应下实现柔性梁结构振动位移的精密驱动。水平安装在梁构件末端的激光位移传感器(Micro?EPSILON,ILD2200?10,分辨率0.15 μm)实时检测构件的振动位移,传感器检测位移经控制器调理为模拟电压信号,然后传输到嵌入在机箱中的A/D模块(NI?AI9205),最后经机箱和USB总线传输到PC机中。整个测试系统基于LabVIEW平台完成,系统实验平台实物如图3所示。
MFC致动器的工作电压范围为-500? +1500 V,故测试过程中选取电压峰峰值分别为±200,±300及±400 V,频率为0.1 Hz的三角波驅动电压信号施加到致动器上,得到柔性构件的末端振动位移与驱动电压之间的关系如图4所示。实验结果表明:MFC致动器的驱动电压和柔性构件振动位移之间存在着严重的迟滞现象,不同激励电压下得到迟滞环的初载曲线基本重合。随着激励电压幅值的增大,迟滞现象愈加明显。在峰峰值±400 V的等幅三角波激励下,最大位移差值出现在-80 V处,约为1.206 mm,柔性构件位移的最大迟滞误差(1.206/3.514)×100%可达34.3%。值得注意的是,在MFC致动器双极性驱动电压作用下,柔性构件的正、负向振动位移存在着明显的偏置现象,且偏置随着驱动电压幅值增大而变大。在±400 V无偏置对称电压驱动下,柔性构件正、负向位移之间的偏置误差(0.302/1.908)×100%可达15.8%。
显然,压电材料的固有特性以及MFC致动器本身复合结构特性导致MFC致动器驱动下柔性结构的低频振动位移存在着较为明显的双极性非对称迟滞现象,从而显著影响了柔性构件的定位和操控性能,难以满足高精度的操作需求。因此,必须要对MFC致动器的非对称迟滞特性进行深入研究,并提出其补偿控制方法以改善驱动精度。
2 双极性非对称改进PI迟滞模型
PI迟滞模型具有结构简单,参数辨识方便的优点,且数学解析形式简明,易于求逆,是应用最广泛描述迟滞现象的唯象模型。经典PI迟滞模型通过多个Backlash基本算子的加权叠加来描述迟滞现象[15]。其中常用的Backlash算子主要有分段单调连续、关于算子中心对称与速率变化无关的Play算子和Stop算子两种。基本迟滞元Play算子特征参数为阈值r、权重w以及初始值y0。
3 BAIPI迟滞模型参数辨识及补偿控制实验
为建立MFC致动器的BAIPI迟滞模型,以激励电压幅值±400 V,频率0.1 Hz的等幅三角波信号与柔性构件末端的同步振动位移之间的电压?位移迟滞曲线(见图4)进行BAIPI模型参数辨识。辨识过程中,BAIPI模型与实际迟滞曲线拟合误差的大小与Play算子和双边死区算子的个数有密切关系,见式(5)。一般而言,在一定范围内随着算子数目的增加,迟滞模型与实测迟滞曲线的拟合程度也会升高,拟合误差逐渐减小。但是由于Play算子和死区算子数目的增多,模型参数辨识与逆模型补偿电压的计算量也随之增大,并有可能降低模型的鲁棒性。实验中,对多组不同Play算子、死区算子个数的迟滞模型拟合精度进行比较分析,在保证模型精度的情况下,最终选取的Play算子、死区算子数目分别为6个和7个,此时的平均拟合误差为45 μm。计算得到的Play算子与其逆算子、死区算子与其逆算子的阈值、权重值如表2和3所示。
从BAIPI迟滞模型、经典PI迟滞模型与实测迟滞曲线拟合情况的对比图6中可以看出:Play算子对称的平行四边形结构决定了经典PI模型的输出位移也是正、负对称的,从而导致经典PI模型不能很好地逼近实测曲线的正、负偏置位移,存在着较大偏差,在负的最大位移处偏差高达267 μm,拟合误差高达16.8%。而引入双边死区算子的BAIPI模型增强了PI模型对非对称现象的逼近能力,故BAIPI模型可以很好地描述MFC致动器的双极性非对称迟滞现象,BAIPI迟滞模型与实测迟滞曲线拟合程度较高,最大拟合误差为4.2%。
为检验基于BAIPI迟滞模型的前馈补偿方法对柔性构件振动位移控制精度的提升效果,开展了柔性构件在MFC致动下跟踪等幅三角波轨迹实验。为了区别前面的辨识过程,采用幅值±1.5 mm、频率0.1 Hz的等幅三角波理想位移信号。根据得到的BAIPI迟滞逆模型式(9),计算得到每个时刻需要输出的补偿控制电压如图7所示。显然,与不考虑MFC迟滞特性的理想控制电压相比,为了消除MFC致动器的双极性非对称迟滞特性,其正、负向电压幅值的补偿结果为338和-385 V。在0?338 V与-385 V?0的电压上升阶段,补偿电压大于理想控制电压,在338?-385 V的电压下降阶段,补偿控制电压明显低于未考虑迟滞的理想控制电压。二者之间的差值用来补偿MFC致动器的非对称迟滞特性。
将图7中计算得到的补偿控制电压施加到MFC致动器上,得到柔性梁构件的同步位移如图8所示。对比结果表明:在补偿控制电压的作用下,柔性构件末端的实测跟踪位移与期望位移曲线基本重合,最大轨迹跟踪偏差54 μm发生在负位移转折处,补偿后的等幅三角波实测位移与理想位移之间最大偏差为70.8 μm,即两者间线性度(0.0708/3)×100%=2.36%如图9所示。显然,MFC致动器的双极性非对称迟滞现象基本消除,基于BAIPI迟滞模型的补偿方法对MFC致动器的迟滞特性有了明显改善。
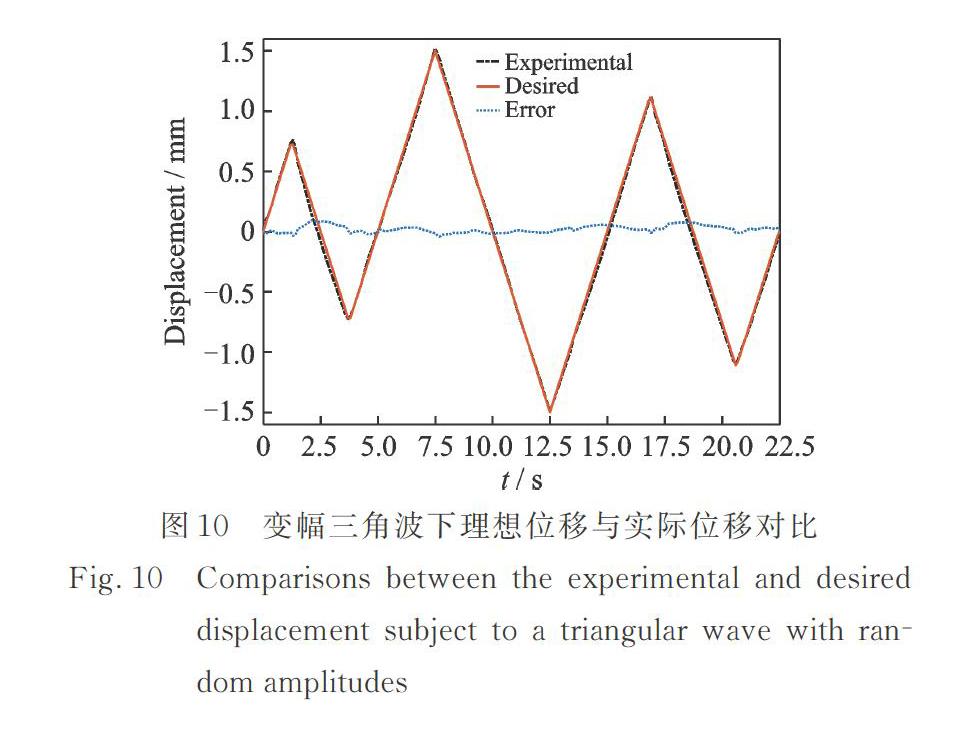
为了进一步验证所提出补偿方法对MFC致动器驱动精度的改善效果,图10给出了MFC致动器驱动柔性梁构件跟踪变幅值三角波位移轨迹的补偿控制效果。可以看出柔性构件的输出位移能够很好地跟踪期望位移,位移上升和下降阶段的迟滞现象基本消除。证实了基于BAIPI迟滞模型的前馈补偿控制方法对MFC致动器迟滞特性消除的有效性。
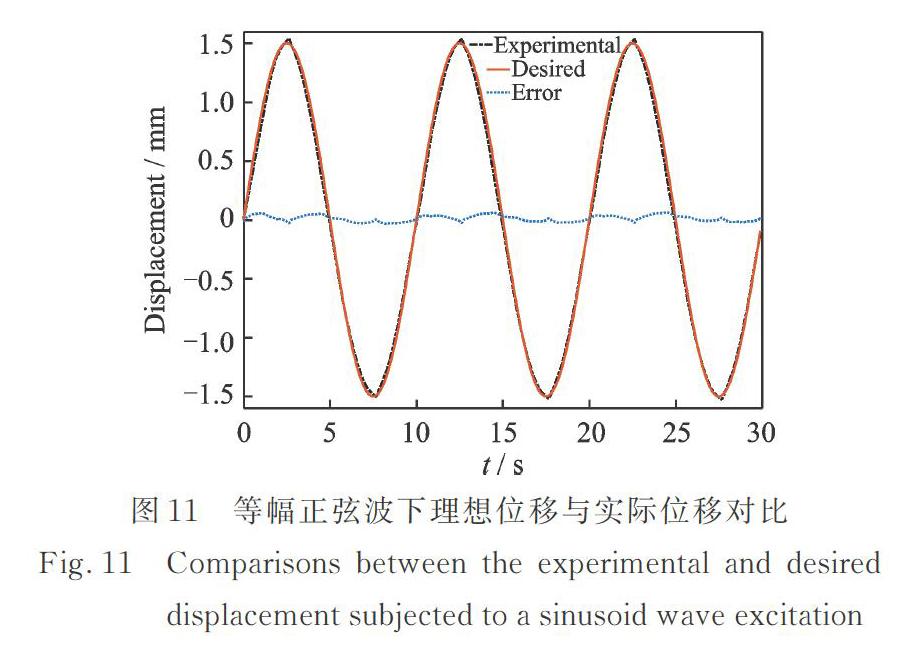
MFC致动器驱动柔性梁构件跟踪等幅值正弦波位移轨迹的补偿控制效果如图11所示,可以看出正弦波信号下,消除迟滞后的跟踪位移与期望位移也基本吻合,验证了基于BAIPI迟滞模型的前馈补偿控制方法对MFC致动器迟滞特性的适应性和实时性能。
表4给出了不同期望跟踪位移下基于BAIPI迟滞模型的补偿方法对MFC致动器驱动精度的改善效果。显然,本文所提的基于BAIPI迟滞模型的前馈补偿方法能够在很大程度上补偿MFC致动器的双极性非对称迟滞误差,提高了其驱动控制精度。但是无法完全消除迟滞误差,下一步有必要引入反馈控制,进一步提高MFC致动器的定位控制精度。
4 结 论
压电材料固有的迟滞特性及复合结构特性导致MFC致动器存在着明显的双极性非对称迟滞特性。在经典PI迟滞模型基础上,将一系列不同权重、不同阈值的Play算子与另一系列不同权重、不同阈值的双边死区算子串联,提出了一种描述MFC致动器双极性非对称迟滞特性的BAIPI迟滞模型。实验辨识结果表明提出的BAIPI模型可以很好地描述MFC致動柔性梁结构的双极性非对称迟滞现象,提高了系统的建模精度。基于BAIPI迟滞逆模型的前馈控制策略,MFC致动器的驱动精度得到的有效改善,提高了柔性梁结构在跟踪等幅和变幅三角波位移时的定位控制精度。证实了所提出BAIPI迟滞模型和前馈补偿方法的有效性。
参考文献:
[1] 娄军强, 周优鹏, 廖江江, 等. 压电柔性臂的ARMAX模型辨识降阶及最优极点移动控制[J]. 振动工程学报, 2018, 31(01): 132-139.
Lou Junqiang, Zhou Youpeng, Liao Jiangjiang, et al. ARMAX model identification and vibration suppression of a piezoelectric flexible manipulator using optimal pole shifting control[J]. Journal of Vibration Engineering, 2018, 31(01): 132-139.
[2] 邱志成, 李 城. 双连杆柔性机械臂振动主动控制与实验[J].振动.测试与诊断, 2019, 39(03): 503-511+668.
Qiu Zhicheng, Li Cheng. Experimental study on two-link rigid-flexible manipulator vibration control[J]. Journal of Vibration, Measurement & Diagnosis, 2019, 39(03): 503-511+668.
[3] Pramanik R, Arockiarajan A. Electro-mechanical creep 1-3 piezocomposites: Theoretical modeling and experimental approach[J]. Ceramics International, 2018, 44: 13934-13943.
[4] Henry A C, Molinari G, Rivass-Padilla J R, et al. Smart morphing wing: Optimization of distributed piezoelectric actuation[J]. AIAA Journal, 2019, 57(6): 2384-2393.
[5] Shahab S, Erturk A. Coupling of experimentally validated electroelastic dynamics and mixing rules formulation for macro-fiber composite piezoelectric structures[J]. Journal of Intelligent Material Systems and Structures, 2017, 28(12): 1575-1588.
[6] Li H, Li H Y, Chen Z B, et al. Experiments on active precision isolation with a smart conical adapter[J]. Journal of Sound and Vibration, 2016, 374: 17-28.
[7] 范 伟, 林瑜阳, 李钟慎. 压电陶瓷驱动器的迟滞特性[J]. 光学精密工程, 2016, 24(05): 1112-1117.
Fan Wei, Lin Yuyang, Li Zhongshen. Hysteresis characteristics of piezoelectric ceramic actuators [J]. Optics and Precision Engineering, 2016, 24(05): 1112-1117.
[8] 高仁璟, 张 莹, 赵 剑, 等.面向结构形状控制的压电纤维复合薄膜驱动器布局方式与控制参数协同优化设计[J].机械工程学报, 2016, 52(18): 177-183.
Gao Renjing, Zhang Ying, Zhao Jian, et al. Integrated design optimization of MFC-layout form and control parameters for morphing structural shapes[J]. Journal of Mechanical Engineering, 2016, 52(18): 177-183.
[9] Bilgen O, Friswell M I, Inman D J. Theoretical and experimental analysis of hysteresis in piezocomposite airfoils using Preisach model[J]. Journal of Aircraft, 2011, 48(6):1935-1947.
[10] Chen L Q, Wu X H, Sun Q, et al. Experimental study on the electromechanical hysteresis property of macro fiber composite actuator[J]. International Journal of Acoustics and Vibrations, 2017, 22(4): 467-480.
[11] Yang Y L, Lou J Q, Wu G H, et al. Design and position/force control of an S-shaped MFC microgripper[J]. Sensors and Actuators A: Physical, 2018, 282: 63-78.
[12] Schr?ck J, Meurer T, Kugi A. Control of a flexible beam actuated by macro-fiber composite patches: II. Hysteresis and creep compensation, experimental results[J]. Smart Materials and Structures, 2011, 20(1): 015016.
[13] Wilkie W K, Inman D J, High J W, et al. Recent developments in NASA piezocomposite actuator technology[EB/OL]. 2005.
[14] Zheng X, Lin L, Ichchou M N, et al. Hysteresis and the nonlinear equivalent piezoelectric coefficient of MFCs for actuation[J]. Chinese Journal of Aeronautics, 2017, 30(1): 88-98.
[15] 田 雷, 陳俊杰, 崔玉国, 等. 基于PI迟滞模型的单压电变形镜开环控制[J]. 仪器仪表学报, 2017, 38(01): 136-142.
Tian Lei, Chen Junjie, Cui Yuguo, et al. Open-loop control of unimorph piezoelectric deformable mirror based on PI hysteresis model[J]. Chinese Journal of Scientific Instrument, 2017, 38(01): 136-142.
[16] 毛剑琴.智能结构动力学与控制[M]. 北京:科学出版社, 2013.
[17] Xie S L, Liu H T, Mei J P, et al. Modeling and compensation of asymmetric hysteresis for pneumatic artificial muscles with a modified generalized Prandtl-Ishlinskii model[J]. Mechatronics, 2018, 52: 49-57.
Abstract: Macro fiber composite (MFC) affords notable advantages of good flexibility, high deform ability and large actuation ability, and has been widely used in the precision engineering and active deformation control, etc. However, the actuation and positioning accuracies of the MFC actuators are reduced due to their asymmetric hysteresis nonlinearity. A Bipolar Asymmetric Improved PI (BAIPI) hysteresis model is proposed to describe the hysteresis nonlinearity of MFC actuators. The BAIPI model is composed of two parts: the weighted superposition of the play hysteresis operators based on the classical PI hysteresis model is introduced to deal with the symmetric hysteresis nonlinearity. And the asymmetric bipolar phenomenon is described by the linear superposition of many double-sides dead-zone operators with different threshold and weight values. Experimental identification results show that the hysteresis modeling error of the MFC-actuated cantilever system reduces to 4.2% using the proposed BAIPI model, while that of the PI model is 16.8%. With the feedforward compensation method based on the inverse BAIPI model, the measured tracking trajectories of the triangular wave with consistent and random amplitudes are in good agreement with the desired trajectories, and the linearity between the desired and compensated trajectories achieves 2.36%. As a result, the effectiveness and feasibility of the proposed BAIPI hysteresis model and feedforward compensation method is demonstrated.
Key words: hysteresis; marco fiber composites (MFC); bipolar asymmetric improved PI model; double-sides dead zone operator; feedforward compensation
作者簡介: 徐金秋(1994-),男,硕士研究生
通讯作者: 娄军强(1986-),男,博士/博士后,副教授。E-mail: loujunqiang@nbu.edu.cn
通信作者:陈特欢(1988-),男,博士,副教授。E-mail: Chentehuan@nbu.edu.cn
