应对移动阴影的车载光伏步进扫描快速功率追踪
2021-06-06韩国鹏薛聪聪陈维荣戴朝华刘正杰
韩国鹏 ,薛聪聪 ,王 伟 ,陈维荣 ,郭 爱 ,戴朝华 ,刘正杰
(1. 西南交通大学电气工程学院,四川 成都 611756;2. 中车唐山机车车辆有限公司,河北 唐山 064000)
光伏阵列被局部遮挡时其P-U(功率-电压)特性曲线具有多个峰值,传统的最大功率追踪算法易因陷入局部峰值点而失效[1-3]. 国内外学者对此问题已展开相关研究,并提出多种全局最大功率跟踪(global maximum power point tracking,GMPPT)策略. 根据寻优策略的不同,GMPPT策略可分为两类:第一类是基于随机优化理论的智能优化算法[4-7],这类算法具有较好的全局搜索能力,但性能对初值依赖度大、迭代复杂,且属于随机搜索,难以保证全局最优值,尤其在阴影和低光照强度下易导致寻优失败[8];第二类是基于光伏输出特性的扫描算法,文献[9]通过探究直流母线电压与光伏输出功率的耦合关系进行GMPPT,采样电路简单、抗干扰能力强,文献[10]以负载线法进行寻优,无需增添设备即可实现GMPPT,文献[11-12]将扫描法和扰动观察法相结合,其寻优精度较高.
车载光伏发电系统与常规光伏发电系统有所不同,其工作环境复杂,遮挡阴影移动变化,上述策略追踪耗时长,某些情况下甚至无法追踪到全局最大功率点,且此问题在组件组数多、不同光伏单体间辐照强度差异大时更加严重.
针对上述问题,本文探究局部阴影对串联光伏阵列输出特性的影响,基于电流及环境参数计算阵列峰值点电压近似值,缩减追踪时间;分析光伏阵列峰值点电压分布规律及功率变化趋势,提出一种基于温度传感器、可自适应变步长的GMPPT步进扫描 法(step by step scanning-global maximum power point tracking,SS-GMPPT),分析在不同工况下所述算法的追踪性能,并与常规算法对比,验证所提算法性能.
1 阴影下光伏阵列输出特性分析
Miller和Gillett于1974年在求解车辆路线问题时提出了扫描法的概念,文献[11-12]将扫描法和扰动观察法相结合,仅需要少量硬件电路和逻辑器件,即可实现全局寻优功能,成本低廉且原理简单,适用于小型光伏发电系统的最大功率追踪场合.扫描法对光伏阵列输出电压的可行区间进行扫描,其扫描步长显著影响MPPT (maximum power point tracking)的速度与精度,同时当遇到阴影遮挡时,光伏阵列输出出现多峰,峰值功率点电压发生偏移,传统扫描法往往容易失效. 为此,需要分析阴影下光伏阵列输出特性,并对扫描法进行改进,方可应对阴影下的最大功率跟踪.
为分析局部阴影条件下光伏输出曲线功率极值点的分布规律,本文搭建了(1 × 5)串联光伏阵列,并为各光伏单元并联旁路二极管用于削弱热斑效应的不良影响[13]. 仿真模型中光伏单元为HN-214,其在光伏组件标准测试条件(STC)下参数如表1所示.

表 1 HN-214标称参数Tab. 1 Nominal parameter of HN-214
各光伏单体设置100~900 W/m2、步长为100 W/m2的9种辐照强度,由排列组合可知,光伏阵列共存在1 287种光照条件,并有1 287条输出特性曲线与之对应. 其中,单峰值特性曲线9种,双峰值144种,三峰值504种,四峰值504种,五峰值56种. 本文取轻度遮挡、中度遮挡和重度遮挡3个典型工况进行分析,串联光伏阵列5个单体对应的光照分别为[900 900 800 800 700]、[900 900 900 700 100]和[900 700 500 300 100],其输出特性曲线如图1所示.
轻度遮挡:特性曲线如图1(a)所示,具有3个功率极值点电压,分别为74.5、147.8、185.7 V. 如文献[11]所述,阴影条件下功率峰值点应分布于(x+0.8m)Uocn处,其中,x为高于当前分组辐照强度的单体数量,m为当前分组内的单体数量,Uocn为单体光伏电池的开路电压. 据此计算,峰值点电压为77.0、172.5、229.5 V,其与实际电压偏差分别为3.2%、14.3%、19.1%.
中度遮挡:特性曲线如图1(b)所示,峰值点电压为111.8、162.2、205.5 V. 计算值为115.5、181.8、229.5 V,偏差分别为3.2%、10.8%、10.5%.
重度遮挡:特性曲线如图1(c)所示,峰值点电压为37.0、74.9、114.3、155.3、196.9 V,计算值为38.5、86.3、134.0、181.8、229.6 V,偏差分别为3.9%、13.2%、14.7%、14.6%、14.4%.
观测图1曲线,可得如下规律:
1) 串联光伏阵列的输出特性曲线在局部阴影时功率极值点数量与辐照强度分组数相同;
2) 功率极值点电压约为(x+ 0.8m)Uocn,但计算值与实际值有所偏离,需加以修正,修正方法详见本文第2节中的光伏阵列输出电压计算;
3) 输出特性曲线的功率极值点大致呈现先递增再递减的趋势. 在1 287种输出特性曲线中,共有1 262条符合此规律,占比98.1%. 因此,可在峰值点功率递减时可结束追踪,缩短追踪时间.

图1 不同阴影条件下串联光伏阵列输出特性Fig. 1 Output curve of series photovoltaic array under varied irradiation intensity
2 阴影条件下光伏参数计算方法
2.1 光伏单体辐照强度及输出电压计算
光伏单体在输出电压低于0.7倍开路电压Uoc_mod时输出电流近乎恒定,可视作短路电流[14]. 本文对串联阵列输出电压施加小扰动,若输出电流波动量不超过设定值则认为输出电压处于恒流段,将此时电流等效为该辐照强度下的短路电流.
光伏单体的输出特性与环境参数密切相关. 车体运动时,车载光伏阴影区域变化迅速,加之车表空气流速快,组件发热问题轻,串联光伏阵列中单体的温度一致性好,因此本文主要考虑辐照强度对光伏单体输出特性的影响. 当环境温度已知时,可根据式(1)、(2)以及单体短路电流,计算环境辐照强度、光伏单体的开路电压等参数.

式中:Snow为当前分组的辐照强度;Sb为标况下辐照强度;Tnow为当前环境温度;Tb为标况下环境温度;Inow为当前分组光伏单体短路电流;Isc为标况下光伏单体短路电流;Uoc为标况下光伏单体开路电压;a、b为修正系数,其值分别为0.0025、0.5.
为降低硬件要求,提升系统运算速度,本文以拟合多项式替代式(2),如式(3)、(4)所示.

式中:k为开路电压比例系数;a1、a2、a3、a4为拟合常系数,其值分别为2.8 × 10−12、2.5 × 10−8、2.3 × 10−4和0.8.
此时,拟合残差模为6.433 × 10−5.
2.2 光伏阵列输出电压计算
辐照强度为[1000 500 100]时,输出特性曲线如图2所示. 其中:UA为输出电流为2.50 A时的电压值;UB1为1000 W/m2时光伏单体的输出电压,UB2为1 000 W/m2时光伏单体的开路电压,UB3为2.1节拟合计算所得电压,UC为500 W/m2时光伏单体的输出电压. 显然UA为UB1与UC之和. 精确求解UB1计算量较大,本文以直线UB3替代UB1,其计算方法如式(5)所示.

式中:Um_mod为单体最大功率点电压;Isc_mod为单体最大功率点电流.

图2 串联光伏阵列输出电压拟合曲线Fig. 2 Output voltage fitting curve of the series photovoltaic array
当光伏阵列输出电流继续减小,多个单体运行于恒压源区段时,输出电压根据式(6)、(7)计算.
式中:USET为光伏组串的输出电压;n为当前分组单体数量;Ubase为光伏阵列的基准电压;l为处于恒压源阶段的光伏阵列分组数量;nj为第j组辐照强度下光伏单体数量;Um_j为第j组辐照强度下单体最大功率点电压;Isc_j为第j组辐照强度下单体短路电流.
3 SS-GMPPT步进扫描法
本文所提SS-GMPPT检测组件恒流段的输出电流及温度并判断单体所处的光照条件,从而计算光照条件下单体的MPP电压,并以此电压值为步长进行步进寻优. 当寻得功率峰值点后,判断是否已扫描所有光伏单体,或功率峰值点功率是否递减,若不满足则在计算基准电压后,继续寻找恒流段区间并重复上述过程,直至条件满足.
具体步骤如下:
步骤1程序初始化.USET初始值为0;Ustep为步进电压,取0.2Uocn;dU为扰动观测电压,其取值越小则恒流段判断越精确,本文取0.2;Ubase初始值为0;p为已扫描的组数,初始值为1;q为当前分组中已经扫描的单体数量,初始值为1;np为存储各辐照强度下分组的单体数量. 其中,为提升算法的追踪速率,且防止因步长过大而越过下一阶段电流恒流源的电压范围,Ustep取值范围如式(8).

式中:Uoc_min为处于最低光照强度下光伏单体开路电压值,0 .7Uoc_min为此光伏单体的恒流段区间.
步骤2以固定步长寻找恒流段区;USET=Ubase+Ustep,检测此时光伏阵列的输出电流Isc1;
步骤3施加小扰动判断工作点是否处于恒流段,此扰动量取决于硬件采样精度;USET=USET+ dU,检测施加扰动量后的光伏阵列的输出电流Isc2;计算Isc1及Isc2之间的电流差值比,若abs(Isc2−Isc1)/Isc1<ε1(ε1为任意小的值,本文取0.05),则工作点位于恒流段,将Isc1作为第k阶段的短路电流Isc_k,进行下一步骤,否则返回步骤2;
步骤4以Isc_k及温度传感器测得环境温度Tnow计算现阶段峰值点电压Unow_k和Ubase.
步骤5以当前光照下单体的峰值点电压为步长进行步进;USET=Ubase+qUnow_k,记录输出电压Uq、电流Iq;
步骤6判断各光照强度下单体数量和当前光照强度下单体数量之和是否小于总单体数量Npar,若不满足则完成寻优,跳至步骤9,否则下一步;
步骤7判断是否寻得峰值点;若abs(Iq−Isc_k)/Isc_k小于ε2(ε2为任意小的值,本文取0.01),则未寻得峰值点,q=q+ 1,返回步骤6;否则已寻得当前峰值点,存储当前阶段局部最大功率点参数Um_p、Im_p,更新迭代参数np=q,p=p+ 1,q= 1;
步骤8判断GMPP功率是否大于其他已知GMPP功率,条件成立则跳至步骤2,否则满足寻优终止条件,步入步骤9;
步骤9计算全局最大峰值点电压Um_all,令USET=Um_all,判断外界条件是否发生变化,若输出功率与预期不符则外界条件发生变化,系统重新初始化,否则全局寻优结束,寻优算法退出,直至下一次寻优开始.
4 仿真验证
为验证算法速度与精度,对3种典型工况:无遮挡、轻度遮挡(如杆塔遮挡)和重度遮挡(如建筑物及树木遮挡)进行仿真,并与普通扫描算法对比.
4.1 无遮挡光照条件
串联光伏阵列光照情况为[900 900 900 900 900],辐照强度分组数为1,P-U输出特性曲线仅有一个峰值点,如图3(a)所示. 图3(b)为步进扫描和普通扫描控制下输出P-t(功率-时间)波形图.
此时,两种算法均需扫描整个电压区间. 步进扫描法以图3(a)中A、B两点计算当前分组中光伏单体所接收的辐照强度,以此估算Um_mod,并以Um_mod为步进量进行寻优,如图3(a)中C、D、···、E等;由于光伏阵列的输出电压均处于900 W/m2光照下的恒流源区段,因而步进量保持不变. 当光伏阵列输出电压为189 V (图3(a)中点F)时,光伏阵列工作在I-U曲线的膝点(恒流源段与恒压源段的交点),输出电流与短路电流间的变化量大于设定值,且由于所处辐照强度的单体数量等于系统光伏单体总量,停止步进;在已知的最大功率极值点处采用扰动观察法寻求最大功率点的精确解. 从图3中可知:常规扫描法迭代步数为7步,耗时0.65 s;步进扫描算法迭代步数为7步,在0.57 s时寻得全局最大功率点,寻得电压更接近实际值,且追踪所需时长缩短12.31%.
4.2 轻度遮挡条件
光伏阵列光照情况为[900 600 600 400 400],此时辐照强度分组数为3,P-U输出特性曲线峰值数为3,如图4(a)所示. 图4(b)为不同算法控制下阵列输出P-t波形图.

图3 无遮挡条件下不同算法的性能对比Fig. 3 Performance comparison of different algorithms without occlusion
此时,P-U曲线峰值点单调递增,两种算法仍需扫描整个电压区间完成寻优过程. 步进算法仍以图4(a)中A、B两点为基准,第一阶段计算短路电流及步进电压,追踪至点C时电流变化量大于限定值,此时已知辐照强度的单体数量小于串联单体数量,功率极值点数量为1,不满足寻优停止条件,因而程序以Ustep为固定步长继续增大输出电压,并以扰动观察法监测输出电流,直至下一个恒流源区间.
扫描至下一阶段的恒流源区间后,系统根据已知辐照强度及阵列输出电流更新基准电压,计算当前辐照强度条件下Um_mod,并作为步进电压步长继续寻优,直至达到系统终止条件(图中点G),转至扰动观察法寻得最大功率点精确位置.

图4 轻度遮挡下不同算法的性能对比Fig. 4 Performance comparison of different algorithms under slight occlusion
由图4可知:普通扫描算法迭代步数为9步,耗时1.00 s;所提算法迭代步数为13步,在0.44 s寻得全局最大功率点,虽然迭代步数增多但电压步进量小且方向单一,耗时短,波动小,速率提升66.00%.
4.3 重度遮挡条件
光照情况为[900 700 400 200 100],此时辐照强度分组数为5,峰值数为5,如图5(a)所示. 图5(b)为不同算法控制下阵列输出P-t波形图.

图5 重度遮挡下不同算法的性能对比Fig. 5 Performance comparison of different algorithms under severely occlusion
此时,P-U曲线峰值点呈现先递增再递减的趋势. 所提算法的前期寻优与轻度遮挡时相同,但当系统运行至点C时,此时系统已寻得3个阶段下功率极值点,且此时PA
5 试验验证
在上述基础之上,研制了光伏样车(如图6所示),以验证基于本文所提算法研制的MPPT控制器的实际性能,并与市场上现有MPPT控制器进行对比.
5.1 试验平台搭建
光伏样车电气连接如图7所示,其包含光伏发电模块、负载、储能单元、传感模块及控制模块. 传感模块包括温度传感器、光照传感器及电压电流传感器;控制模块包含Labview搭建的上位机系统、市场现有MPPT控制器以及SS-GMPPT控制器;样车光伏组件类型为铜铟镓硒,其参数如表2所示,其中:Pm为工况下光伏系统最大输出功率.

图6 光伏样车实物Fig. 6 Prototype of photovoltaic vehicle
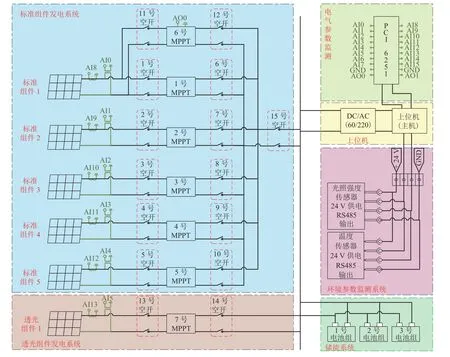
图7 光伏样车电气连接图Fig. 7 Electrical connection diagram of photovoltaic vehicle

表 2 光伏组件标称参数Tab. 2 Nominal parameters of photovoltaic modules
5.2 试验结果
针对光伏样车,随着时间进行连续阴影遮挡:无遮挡→轻度遮挡→无遮挡→重度遮挡,每个工况持续时间为4 s. 测试条件:温度1.6 ℃,试验光源为自然光,起始阶段光照强度为580 W/m2.
分别以市场MPPT控制器及SS-GMPPT控制器进行最大功率追踪,其结果如图8所示. 其中,图8(a)、(b)为市场控制下的P-t、P-U特性曲线,SS-GMPPT的P-t、P-U特性曲线如图8(c)、(d)所示. 整理试验数据,如表3所示. 表中,Tt为控制器追踪耗时,Em为工况下光伏系统理论输出能量,Eo为控制器控制下光伏系统实际输出能量,η为光伏系统实际输出能量与理论输出电量之比.

图8 试验验证结果Fig. 8 Results of experimental verification

表 3 两种控制器的控制效果对比Tab. 3 Control effect comparison of two controllers
由表3和图8(a)可知:当无遮挡时,市场MPPT控制器经过2.15 s寻得全局最大功率点,由图8(c)可知:SS-GMPPT控制器仅耗时0.53 s,追踪速度提升了75%;在轻度遮挡时,图8(a)市场MPPT控制器全局寻优耗时为1.49 s,而图8(c)SS-GMPPT控制器为0.71 s,追踪速度提升了52%. 此外,在重度遮挡区域(12~16 s)时,图8(b)市场MPPT控制器经过短时波动后输出功率稳定于26 W,而图8(d)SS-GMPPT控制器的输出功率为81 W,由此可知,市场MPPT控制器陷入局部最优点致使追踪算法失效,而本文所述算法可有效避免此问题.
6 结 论
为提升车载光伏发电系统的发电性能,加速控制器全局最大功率追踪的速度,本文分析了局部阴影遮挡条件下串联光伏阵列的输出特性,通过检测串联光伏阵列工作于恒流源阶段时的电流,判别阵列的辐照强度分布,并借助峰值点功率分布规律加快寻优速度,提出了基于步进扫描法的SS-GMPPT策略. 结论如下:
1) 本文所提算法可在基于温度传感器及光伏标况下的参数精准判别光伏阵列的光照分布情况,并据此定位光伏组件P-U特性曲线峰值点的位置分布,硬件成本低廉且易于实现;
2) 本文所提算法可在不同光照条件下追踪阴影遮挡的全局最大功率点,即使在重度阴影遮挡情况下也能成功实现MPPT;
3) 与常规普通MPPT控制器相比,嵌入了本文所提算法的SS-GMPPT控制器能够显著提升追踪速度,加速寻优过程.
