一种多飞行器自主编队飞行智能仿真系统研究
2021-06-03梁琳,叶亮
梁 琳, 叶 亮
(中仿智能科技(上海)股份有限公司,上海 201615)
近年来,随着航空技术的发展,无人机在军事和民用领域广泛应用,相对于单个无人机,多机编队执行任务能够更合理地利用资源,解决更为复杂的问题。多机自主编队飞行为完成工作人员不易接近或易伤亡的作战任务提供了有力的手段[1],如在环境监测[2]、森林防火[3]、区域侦察[4-5]、目标跟踪[6-7]、协同作战等民用和军事领域中起到了重要作用。嵌入式计算、通信能力的提高和分布式或者非集中式思想的发展,使得多无人机编队执行任务成为可能。许多国内外专家和学者对多机自主编队飞行进行了研究,并提出了多机编队飞行的关键技术和难点。无人机编队飞行的研究仍有许多难点需要攻克,如编队航迹规划、队形调整与编队机动等[8],精确导航与控制作为编队飞行的关键技术之一[9],验证该关键技术的可行性尤为重要。目前,对多机编队飞行的半物理仿真研究较少。文献[10]~文献[11]均提出了无人机飞行控制仿真系统的设计和实现,但并未涉及多飞行器编队飞行的仿真。文献[12]~文献[13]提出了编队飞行的控制算法,但仅进行了数字仿真。王国丽等[14]提到了多无人机编队飞行仿真系统框架,但并未提到编队飞行导航与控制系统的仿真验证。邹庆元等[15]提出了编队飞行的模块化仿真,未将真实产品接入闭环仿真。王勋等[16]提出了一种无人机编队飞行快速试验系统,该系统包括基于X-Plane 的硬件在回路(HIL)仿真系统和飞行试验系统,但该系统未提到减小仿真系统误差的方法。在现有的仿真系统中,均无能有效真实验证编队飞行的精确导航与控制方案,且未提出提高仿真效率的方案。
根据以上论述,以往对多机自主编队飞行仿真的研究主要集中在数字仿真,减少导航与控制半物理仿真和硬件在环仿真误差鲜有提及,智能管理仿真系统并未见到有相关记载。
针对多机编队自主飞行模拟的要求和现有飞行模拟系统的局限性,如何解决飞行仿真系统中导航与控制的误差,提高仿真效率,缩短导航与控制系统的研制周期和降低研制成本,是仿真控制领域需解决的问题。由于多机自主编队飞行要求导航控制精度高,尤其在近距离编队飞行时,要求导航的精度达到分米级,甚至厘米级,这就要求仿真系统误差尽可能小。通过将时钟源内置于星座模拟器中,且将多个导航星座模拟器置于同一设备中,从时间源头上将实时动力学平台与多通道星座模拟器(多个模拟器)的时间同步,极大地减小了由于时间误差带来的导航误差,提高了仿真系统的真实度。多机自主编队飞行涉及同时管控几个甚至几十个飞行器同时飞行,依靠人工方式效率低且容易出错,通过引入智能化管理的方法,根据飞行任务自主规划路径、自主发送指令、自主判读、自主进行数据分析处理,可以根据要求、生成仿真报告,极大地降低了仿真对人的要求,提高了仿真效率,降低了仿真的人力成本。
1 系统组成和功能
一种多飞行器自主编队飞行仿真系统是一个集遥控、状态监测、控制系统测量原型样机、控制系统执行部件数字模型、飞行器自主飞行控制算法于一体的闭环仿真系统,主要包括以下功能模块:动力学平台、多通道卫星信号模拟器、多通道信号采集与控制模块、控制系统模块和仿真控制模块。上述模块组成的仿真系统克服了人工模拟飞行器仿真时多个飞行器之间的时间难以同步的问题,能验证多机编队自主导航与控制方案的有效性和多机时间的同步性,从而能对整体编队飞行的飞行效果进行有效评估。系统组成如图1所示,其中n表示有n个飞行器参与编队飞行。
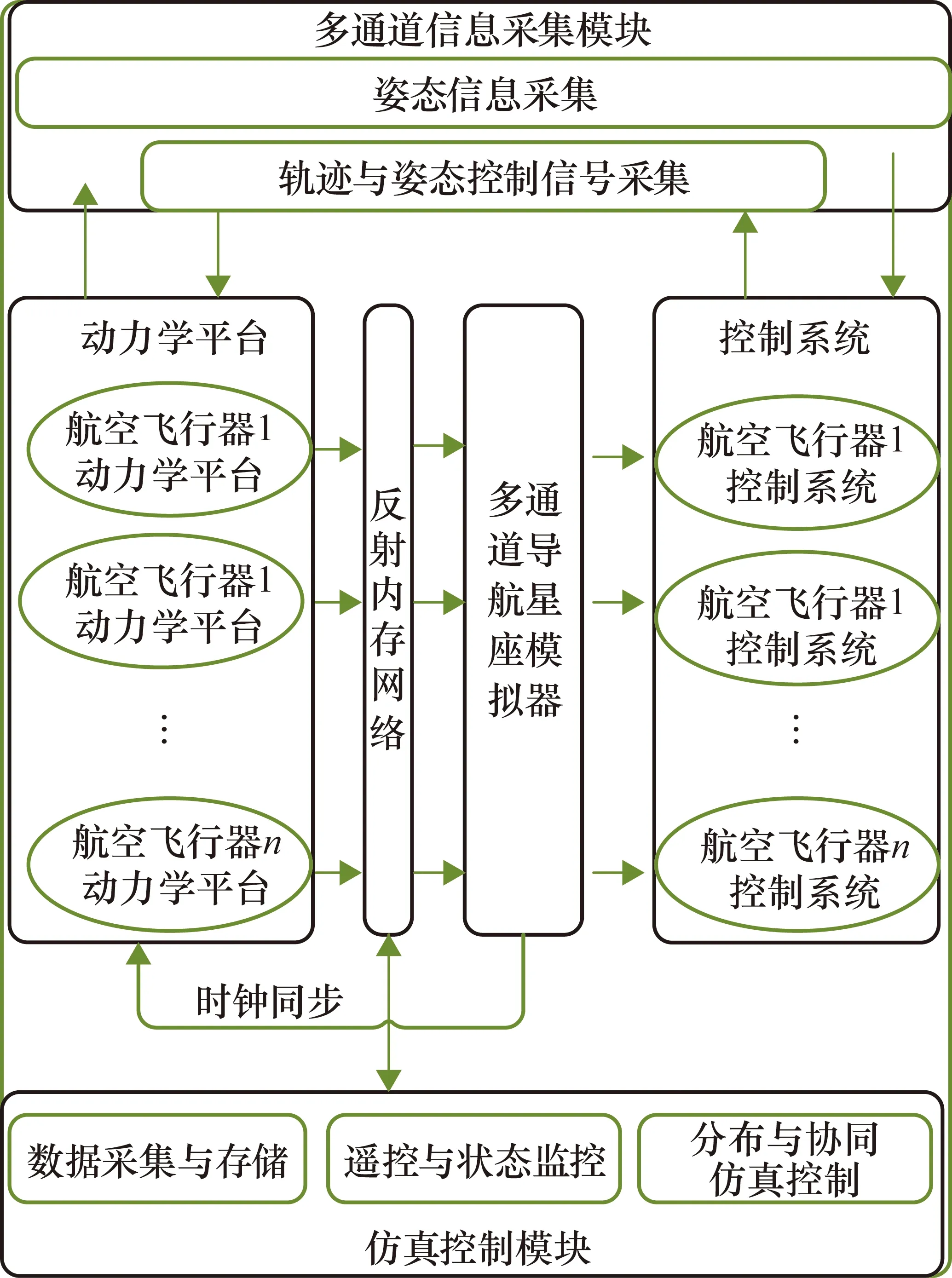
图1 系统组成
其中,动力学平台引入多通道导航星座模拟器时间控制仿真周期,减少两者时间差值随着时间增加而增加,降低了仿真系统带来的导航误差,增加了仿真系统的可信度;动力学平台可同时模拟计算多个飞行器运动状况,接收控制采集模块的控制信号,并对外输出产生的动力学信息;多通道星座模拟器可模拟GPS、格洛纳斯、北斗等星座的信号。通过接收接口控制模块输出的各航空飞行器的动力学信息,模拟输出该航空飞行器在该位置及姿态下的卫星星座信号,输出给对应控制系统的GNSS接收机;控制系统模块为运行各飞行器控制系统,包括姿态控制算法运行、轨迹控制算法运算等,并将生成控制信号输出给动力学平台。
2 仿真系统设计
2.1 动力学平台
动力学平台主要用于模拟计算多个飞行器的姿态与轨迹运行状态,根据飞行器的质量惯量特性和飞行器动力系及运动学算法,以图形化软件平台(如Simulink等)作为建模工具进行软件建模,并利用该平台自身的实时工作空间(RTW)生成实时代码,并通过实时操作系统的RTI(Real-time Interface)代码自动下载器将代码下载至实时操作系统的实时硬件中,实现图形化动力学模型在硬件条件下的实时运行。硬件平台采用研华工控机,如图2所示,主要参数:CPU为i7,内存为32 G,可内置PCI-5565反射内存卡。

图2 动力学软件(含实时平台)运行硬件
动力学平台构成如图3所示,飞行器的姿态和轨道动力学运行于实时平台,执行部件模型接收控制信号,产生相应控制力/控制力矩输出给姿态轨迹/大气扰动模型,从而使飞行器按照设计的轨迹和对应的姿态飞行,姿态轨迹模型运算产生的姿态信息和轨迹信息(主要有WGS84坐标系下的位置、速度、经度、纬度、高度等)根据需求预处理后,作为图形化动力学模型的输出。硬件实时环境通过接收星座模拟器输出的时钟频率信号,作为软件实时平台的运行周期,实现动力学平台与星座模拟器时间的同步,减小两者间的时间误差,进而减少仿真系统的误差,增强仿真系统可信度。飞行中不同的飞行器有不同的性能和飞行轨迹,本文对不同的飞行器分别建模,达到多飞行器同时建模/编译、同步运行的目的。

图3 动力学平台
2.2 多通道导航星座模拟器
多通道导航星座模拟器可同时根据多颗飞行器的运动轨迹信息,给出相应的射频信号到相应GNSS接收机,每一通道主要包括上位机模块和射频生成模块。上位机模块是基于工业用图形化软件平台设计的,用户通过界面输入每个运动目标的运动初始值信息,根据运动目标运动特性生成相应目标载体的运动状态。上位机模块根据目标载体的运动状态和某时刻导航星座星历参数,计算该时刻的可见星数量。可见星的各个参数包括轨道要素、惯性系位置、速度、仰角、方位角、伪距、多普勒、钟差等信息,生成当前可见星的导航电文,发送给射频信号生成模块。
在射频信号生成模块中,扩频调制、载波调制单元将数字中频信号上变频与数模转换,生成模拟中频信号后,输出到射频调制模块。每一路扩频调制、载波调制单元在信号调制过程中通过引入同一时钟信息,保证时钟中频信号生成的同步性,可以减少由于时间偏移产生的载波和相位误差。
射频调制模块通过变频将中频信号转化成相应频点的射频信号,并通过天线或电缆输出,进而,完成卫星导航信号模拟器的信号生成。
同时时钟模块还将时钟信号输出给动力学平台,从硬件上实现多通道星座模拟器与动力学平台之间的时间同步,极大地减少了仿真系统引起的误差,增强了仿真效果的可信度。射频芯片采用AD9361芯片,时钟芯片用RX-8035SA,多通道星座模拟器设计框图如图4所示,实物图如图5所示。

图4 多通道星座模拟器设计框图

图5 多通道导航星座实物图
2.3 导航与控制系统
自主编队飞行各飞行器控制系统主要包括GNSS接收机、高度计、加速度计、陀螺仪等真实飞行产品,还包括导航融合算法、轨迹规划算法、轨迹控制算法、姿态控制算法、控制输出融合算法模块等。编队中每个飞行器都有独立的控制系统,设计仿真系统执行机构为软件模型,嵌入在动力学平台中。导航与控制系统如图6所示。
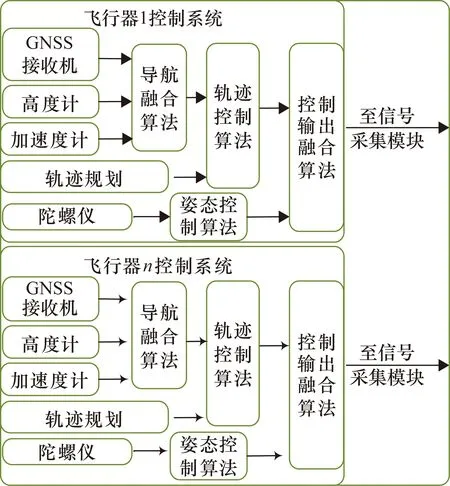
图6 导航与控制系统组成
图6中,GNSS接收机通过射频口接收模拟星座信号,并根据星座导航算法,得到飞行器当前位置;加速度计和高度计通过RS422口接收动力学输出数据,实现加速度和高度的模拟;导航融合算法采用卡尔曼滤波算法,实现三种导航信息的融合,在GNSS接收机接收信号正常的情况下,采用GNSS接收机与加速度计融合,在GNSS接收机信号不正常的情况下,为保证安全,采用加速度计与高度计融合,融合算法见文献[17](362~377页),同时由于编队飞行过程中飞行器一般飞行距离较近,消除了GNSS接收机系统误差,在一定程度上提高了导航精度;轨迹规划由仿真控制中心注入;轨迹控制算法根据轨迹规划和导航信息计算出飞行器运行所需要的控制力;陀螺仪通过422口接收动力学姿态信息,姿态控制算法模块根据陀螺仪计算姿态角,并根据姿态控制算法计算控制力矩;控制输出处理模块根据飞行器质量特性、飞行器执行机构布局等得到相关参数,依据姿态优先原则,计算每个执行机构的实际输出。
2.4 多通道信息采集模块设计
多通道信息采集模块各类型通信接口可选用市场上标准化产品,并将硬件集成于同一工控机中。基于功能板驱动程序和实时操作系统提供的头文件和库函数,利用C++创建实时操作系统环境下的功能板卡的驱动程序,并封装成实时动态链接库;图形化软件平台可调用动态链接库,并将其封装至图形化库。在使用时,将封装好的图形库通过图形化软件平台编译/加载至实时操作系统中,从而实现驱动程序的实时运行。通过采用功能板卡集成与封装驱动并模块化的方法,实现各飞行器动力学平台与控制系统之间的通信。通道信息采集模块设计如图7所示。

图 7 多通道信息采集模块设计图
多通道信息采集模块实物图如图8所示。图8中共有7通道采集板卡,可供7个飞行器同时进行编队飞行仿真,每一个通道中工作有1路CAN,1路LVDS,4路RS22、A/D及D/A各2路和8路I/O,可根据需求对接口类型及路数自制板卡,板卡可全部运行于PCI机箱中,采用机箱为NI PXIe-1082。

图8 多通道信息采集模块实物图
2.5 仿真控制模块设计
本仿真系统涉及多机编队飞行,需建立有效的机制对分布式协同仿真进行控制与监控,以实现智能化测试。仿真控制模块通过光纤网络介入闭环仿真系统中,实现闭环控制系统与仿真控制模块的信息交互。
仿真控制模块支持单飞行器的单条指令以及指令序列的发送,也支持向多飞行器广播指令(如飞行轨迹注入,飞行启动时间等),以实现对多飞行器的飞行控制;支持接收多飞行器下行数据,对飞行器飞行状态进行实时监控。同时,也可以对整个测试网络的网络连接、硬件连接和软件运行的状况进行监控,确保测试系统的正常运行。
仿真控制模块基于专家经验,具有指令自主发送,自主实时判读飞行器工程参数,自主识别飞行故障与处理等功能;并根据自动判读结果,对测试状态、测试数据进行后处理,并自动生成测试报告。对测试过程中指令发送记录、参数原始记录等按时间存入测试数据库中,后续可根据测试时间段来选择回放数据。图9为控制界面图,在试验开始前,可根据试验计划和经验算法生成脚本文件,然后导入控制界面中,点击启动按钮,试验自主进行,并对飞行参数进行监控,若发现状态异常,根据经验数据自主进入故障模式、发出警告、退出试验;如需要人工干预,可通过单条指令发送区域注入指令。

图9 仿真控制界面
2.6 应用举例
以三架四旋翼无人机编队飞行为例,坐标系定义北向为+x轴,东向为y轴,朝地为z轴,开始三架无人机全部在同一位置,初始经度121°,纬度31°,海拔为50 m;S1先垂直起飞160 m(-z),再侧向飞行90 m(-y),到位后悬停等待;S1悬停后,S2垂直起飞160 m(-z),在侧向飞行10 m(-y),到位后悬停等待;S2悬停后,S3垂直起飞160 m(-z),侧向飞行90 m(y),到位后悬停等待。三架飞行器全部就位后,同时延x向飞行600 m(x),并悬停。试验结果如图10~图12所示,展示了试验过程中三架无人机之间的飞行距离,三架飞行器全部就位并开始沿x轴飞行后,相对位置误差不超过3 m,悬停飞行时间达到1400 s后,相对位置误差<1 m,满足自主特定任务编队飞行要求。地面控制中心根据飞行任务设计三架飞行器的飞行轨迹、飞行时序等,并上注给三架飞行器,后发送任务开始指令,三架飞行器即可根据既定程序完成飞行。
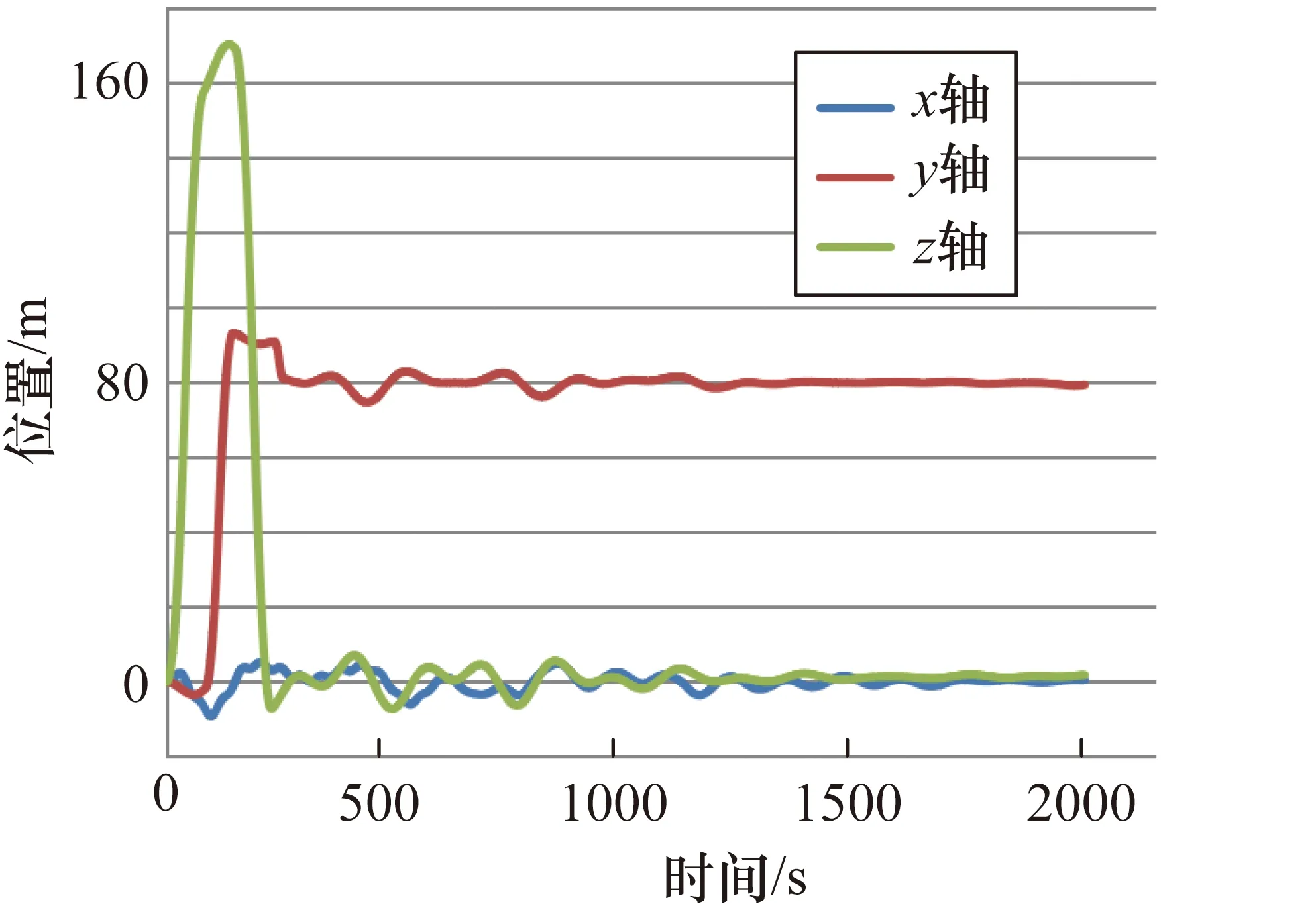
图10 S1及S2相对位置

图11 S1及S3相对位置
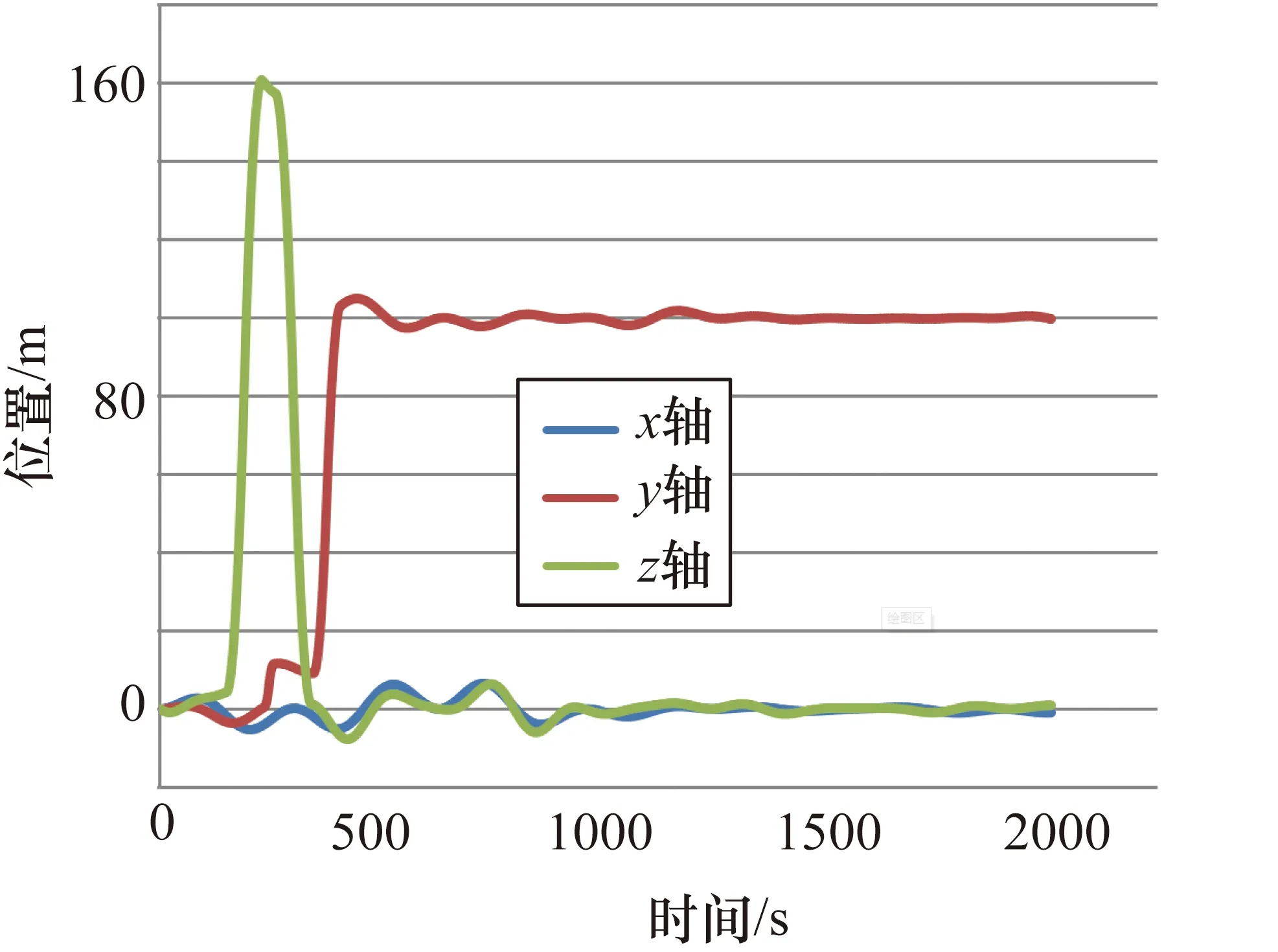
图12 S2及S3相对位置
3 结束语
自主编队飞行是当前和未来无人飞行器执行任务的方向,笔者提出的仿真系统可以有效地验证导航与控制系统方案,实现软件、硬件、设备的同步开发,降低研制成本,缩短了研制周期。还通过采用将多通道星座模拟器与动力学平台时钟同步的方案,降低了仿真系统的误差,增强了仿真系统的真实度。
