异构作动系统的平稳切换控制方法
2021-06-03贾生伟潘彦鹏
胡 骁, 贾生伟, 翟 磊, 潘彦鹏, 李 烨
(北京运载火箭技术研究院,北京 100076)
随着飞行器对可靠性和经济性的要求日益提高,异构作动系统得到了越来越多的应用,该系统由一个液压作动器(Hydraulic Actuator,HA)和一个电液作动器(Electro-Hydrostatic Actuator,EHA)构成[1-6],如图1所示。由于该作动系统中液压作动器和电液作动器具有不同的工作原理,导致它们有着不同的效率特性。因此,该作动系统存在着能量综合管理的难题。
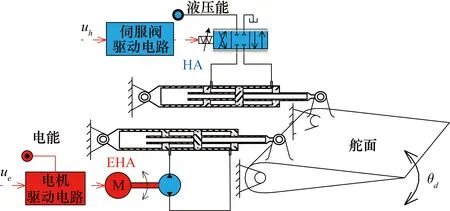
图1 异构作动系统示意图
在异构作动系统的工作模式方面,德国汉堡技术大学的Cochoy等人针对非相似余度作动系统提出了一种工作模式:主动/无载(Active/No-Load,A/NL)模式。在该模式下,需要对两个作动器同时进行控制,在正常工作状态下,对HA进行位置控制,对EHA进行零力跟随控制;在异常情况下,通过模式切换开关,对EHA进行位置控制,对HA进行旁通控制[7-8]。
在异构作动系统的能量特性方面,大部分研究工作主要针对HA和EHA单独开展,尚未综合分析HA和EHA的能量特性,并以此为基础开展后续能量综合管理研究[9-10]。
本文针对上述问题,提出了一种新型的工作模式,使得该系统具备根据所处工况,自主切换HA、EHA的负载力/位置控制的能力。对上述工作模式进行分析,发现该模式下,能量特性得到了较大的改善,但是由于HA和EHA的“切换”,导致位置跟踪存在一定的“抖动”。针对上述问题,本文提出了适应性改进措施,并对改进措施的有效性进行了分析与验证。
1 建模与分析
1.1 系统建模
1.1.1 HA建模
HA主要由恒压源、控制器、伺服阀和液压缸组成[11],如图2所示。恒压源为HA提供液压动力。控制器的输入信号为位移指令信号和位移反馈信号,通过控制算法,输出伺服阀的控制电流信号,调节伺服阀的阀开口,进而调节通过伺服阀的流量。液压缸与伺服阀相连,将净流量转化为压力的变化量,驱动舵面完成指定的工作。HA模型关键参数如表1所示。
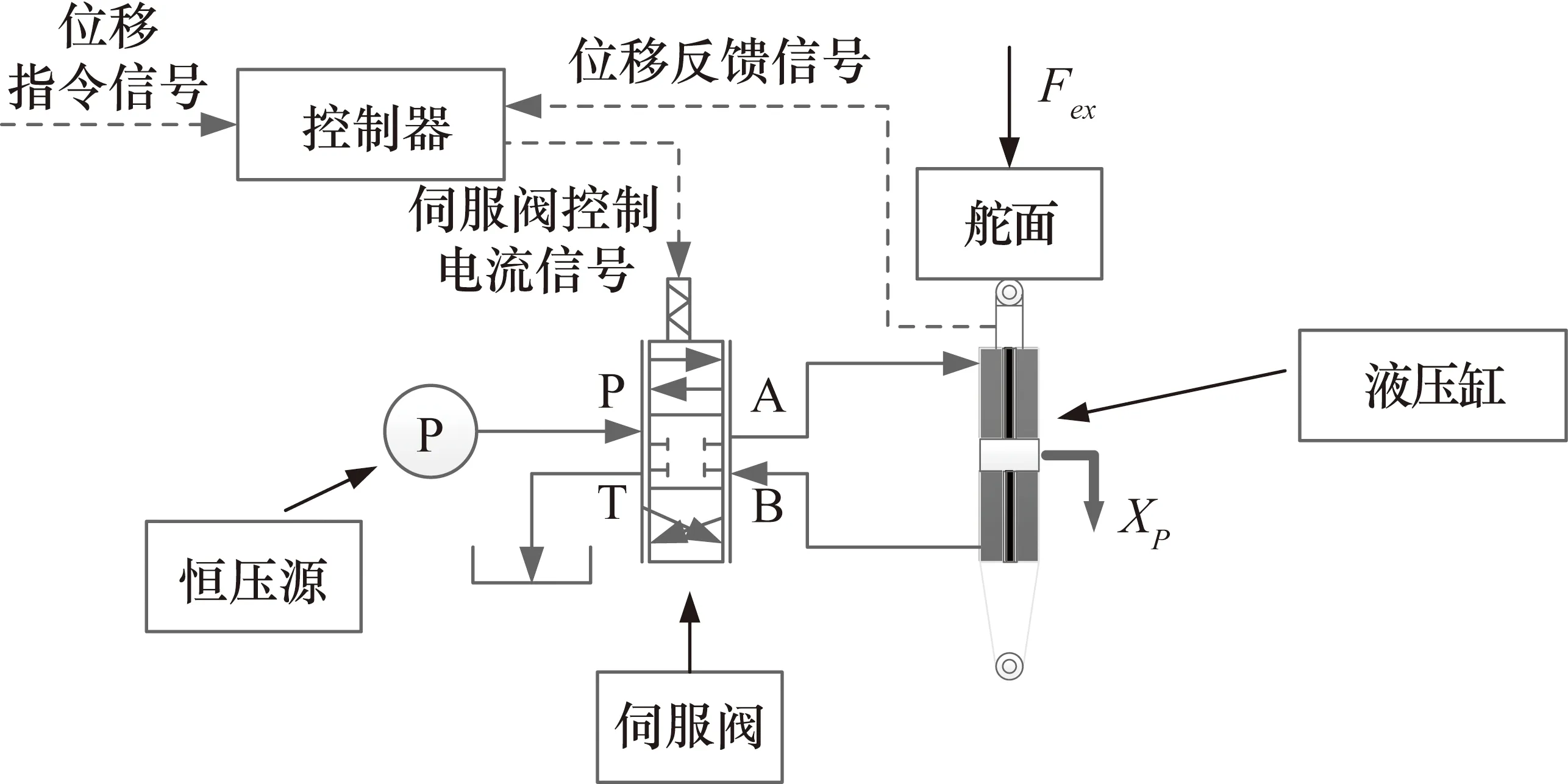
图2 HA原理示意图

表1 HA模型关键参数表
1.1.2 EHA建模
EHA由电机、液压泵、液压缸和电控单元组成[12],如图3所示。输入信号与各反馈信号在控制器里按控制律进行计算后转变为电控信号,经驱动电路放大为功率电信号,由功率电信号驱动的电机带动液压泵旋转,最终由液压泵输出的压力油驱动舵面进行工作。EHA模型关键参数如表2所示。
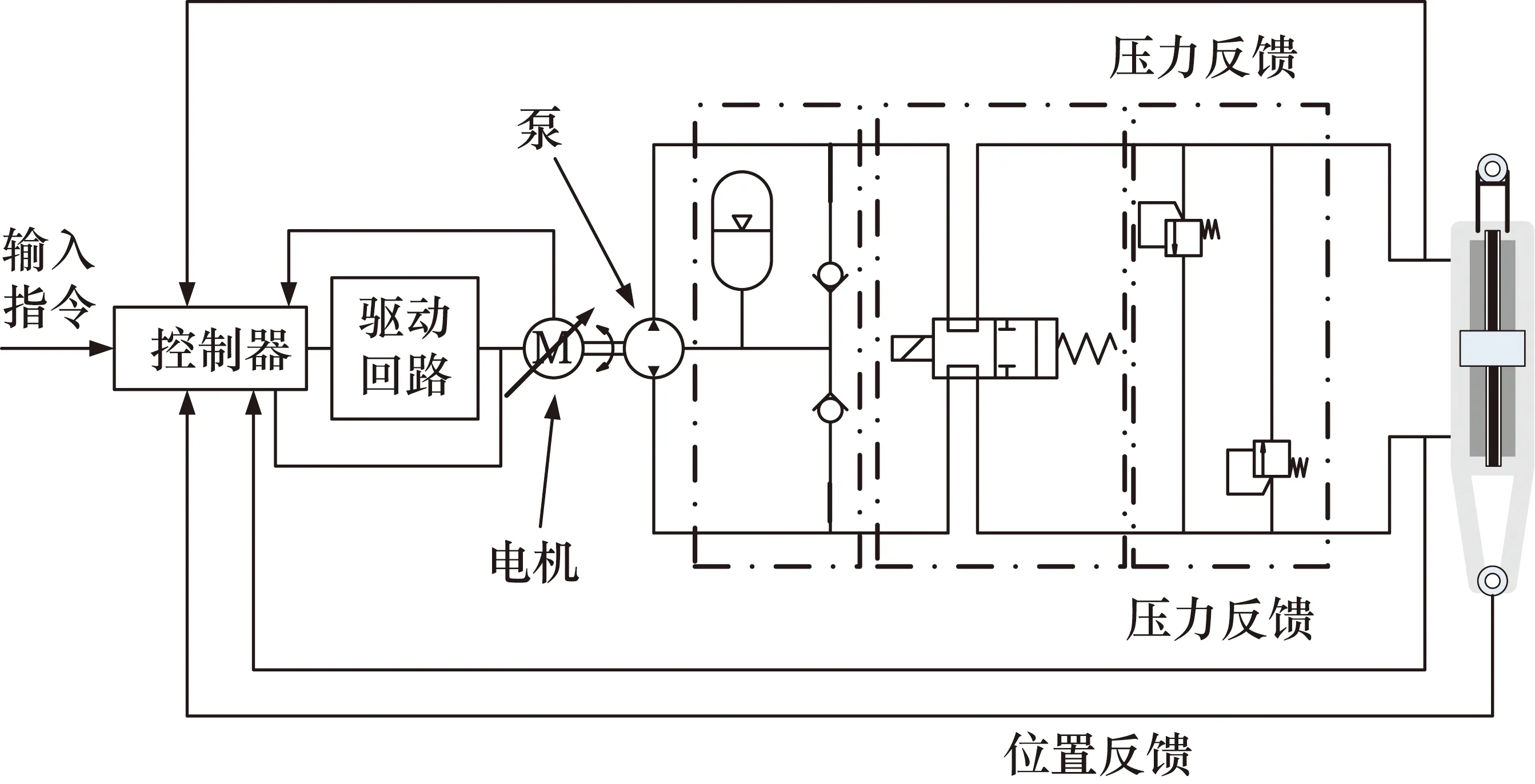
图3 EHA原理示意图

表2 关键参数表
1.2 效率特性
1.2.1 效率定义
本文中作动器效率的定义是,稳态时输出功率与输入功率的比值:
(1)
式中,η为作动器效率;Pout为作动器的输出功率;Pin为作动器的输入功率。
1.2.2 工作点的设定
由1.1中作动器的参数可知,HA与EHA的最大负载力为45000 N,最大速度为100 mm/s,为了尽可能准确地得到HA与EHA的效率特性,应在计算成本允许的条件下,尽可能多地设定工作点,与此同时,考虑到速度在零值附件变化较为剧烈,因此设计以下工作点选取方案。
① 考虑速度v在0~2 mm/s之间,每隔0.5 mm/s设置一个工作点,在2~100 mm/s之间,每隔2 mm/s设置一个工作点;
② 考虑负载力F在0~30000 N之间,每隔800 N设置一个工作点。
1.2.3 Matlab/Simulink与AMESim联合仿真
综合考虑Matlab/Simulink与AMESim在数学仿真中的优势,设计以下仿真策略:在Matlab/Simulink中完成工作点的设定以及数据记录的功能,在AMESim中完成HA与EHA的仿真功能,如图4所示。
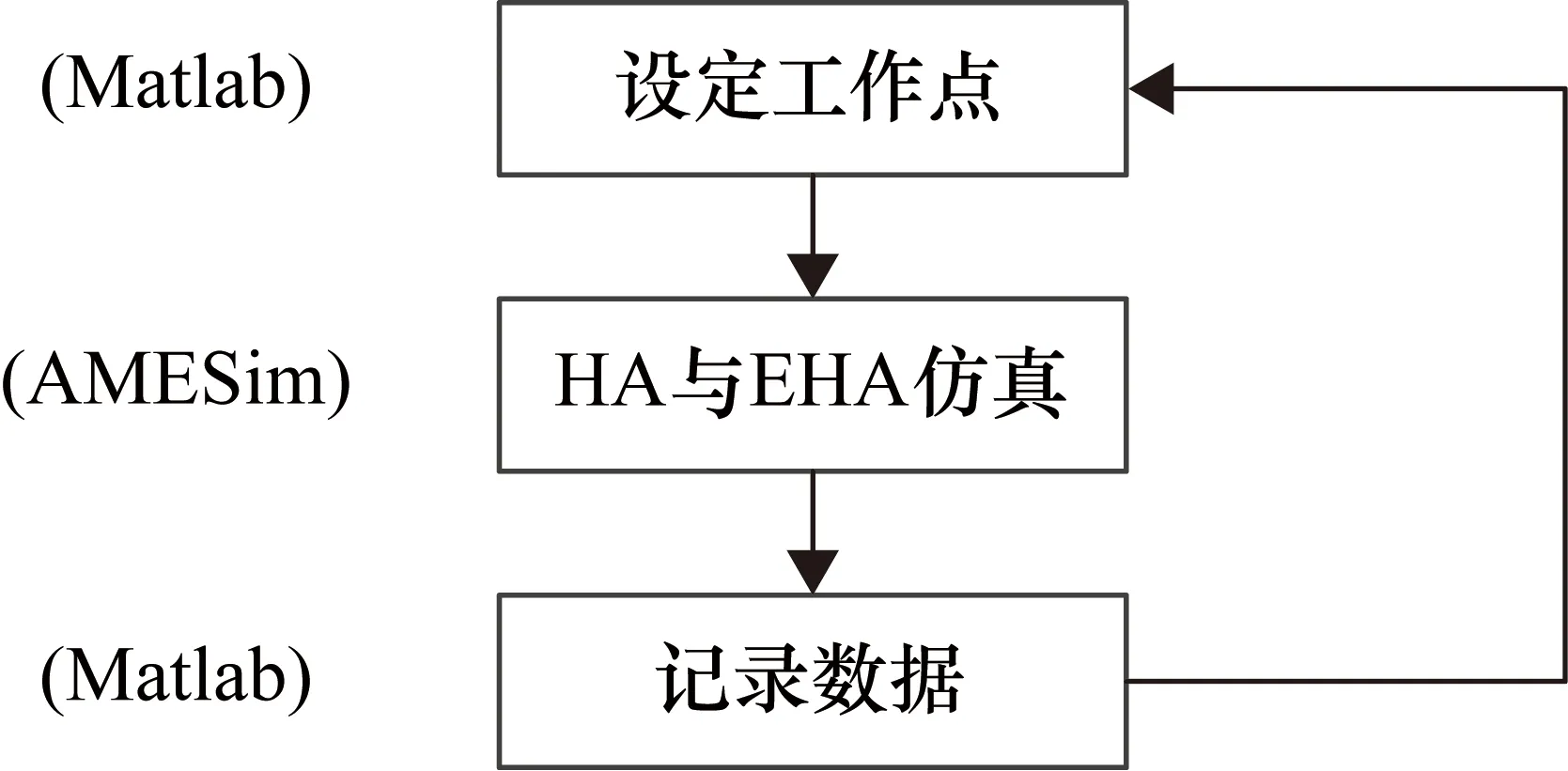
图4 联合仿真示意
1.2.4 仿真结果与分析
在给定参数、给定工作点的条件下,HA和EHA的效率特性如图5、图6所示。
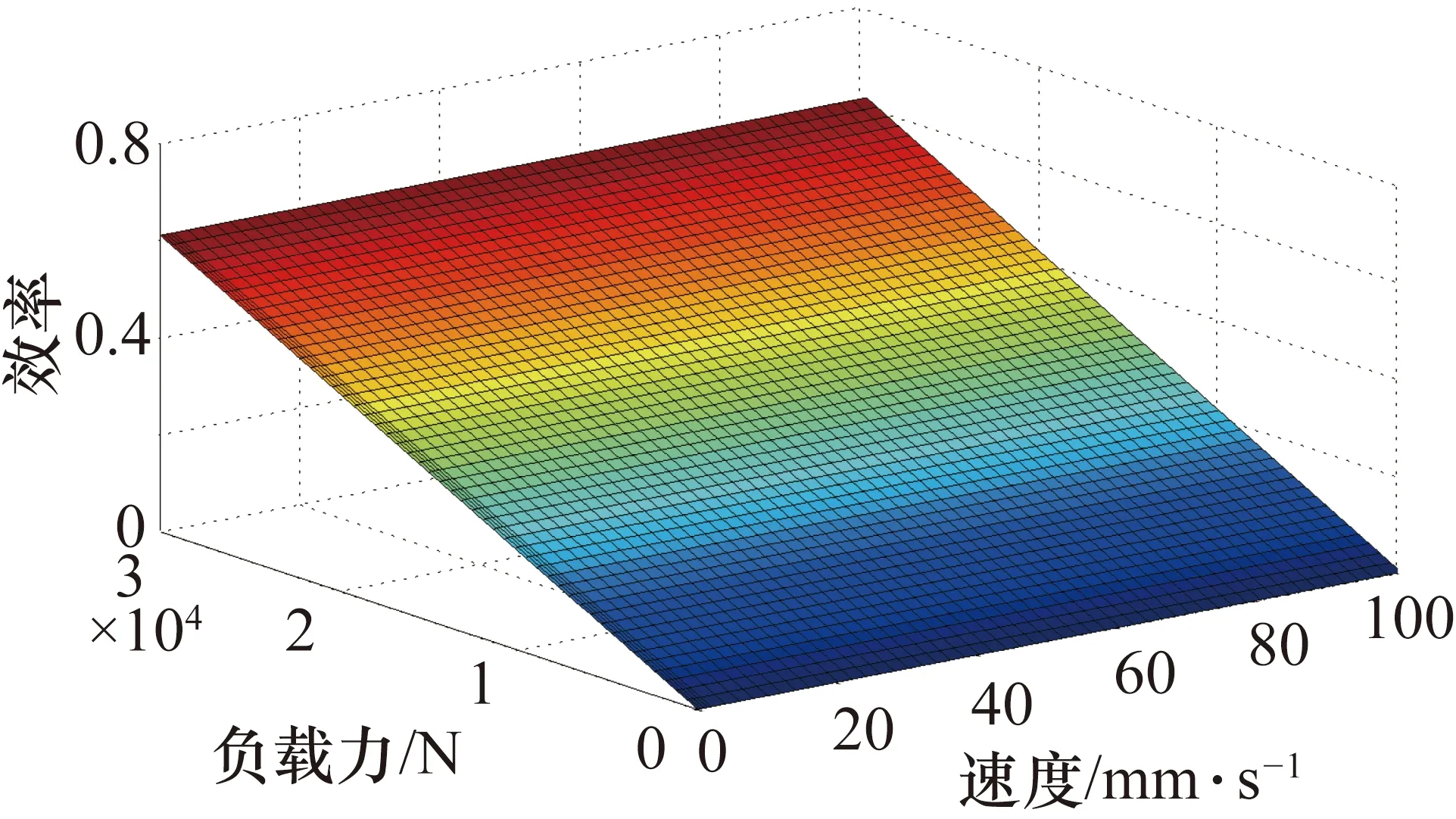
图5 HA效率特性示意图

图6 EHA效率特性示意图
图7是HA与EHA效率的对比示意图,其中红色区域表明,在该区域内,EHA的效率高于HA的效率;蓝色区域表明,在该区域内,HA的效率高于EHA的效率。从7图中不难发现,在大多数工况下,EHA的效率均高于HA的效率,但当负载力大于35000 N时,HA的效率高于EHA的效率。
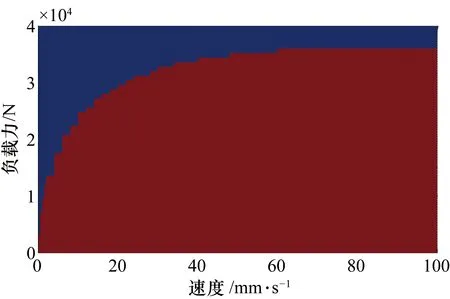
图7 HA与EHA效率对比示意图
2 能量管理策略
2.1 基于切换机制的能量综合管理策略
以活塞杆速度为X轴,以负载力为Y轴,确定异构作动系统的四象限工作模式,如图8所示。当作动系统处于一、三象限时,作动系统做正功;当作动系统处于二、四象限时,作动系统做负功[13-17]。
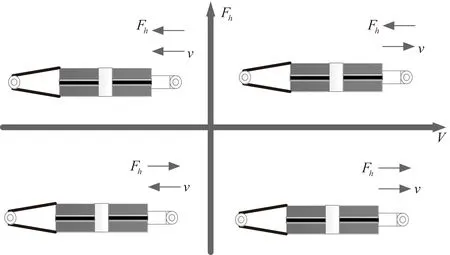
图8 异构作动系统四象限工况示意图
能量综合管理策略的核心思想是:利用HA和EHA的工作原理,实现顺载工况下的能量回收;利用HA和EHA的效率特性,以“谁效率高,谁优先用”为切换原则,实现最小化能量消耗。具体说明如下。
① 检测作动系统的顺载/逆载工况,若是顺载工况,执行②,若是逆载工况,执行③;
② 若处于顺载工况,充分利用EHA的电机特性,实现能量回收,即EHA工作,HA旁通;
③ 若处于逆载工况,充分利用HA和EHA的效率特性,优先使用EHA,当且仅当满足图6的负载力切换条件时,使用HA。
对于异构作动系统而言,在不考虑故障的情况下,存在3种工作模式,分别是HA单独工作(定义其为模式1)、EHA单独工作(定义其为模式2)和本文提出的全新工作模式(定义其为模式3),以下通过仿真的方法,对这3种工作模式进行分析。
2.2 仿真结果分析
假设异构作动系统的位移指令和负载力指令如图9所示。

图9 指令信号示意图
2.2.1 模式1仿真结果分析
在Matlab/Simulink的控制器中设定异构作动系统在模式1下工作,仿真结果如图10所示。
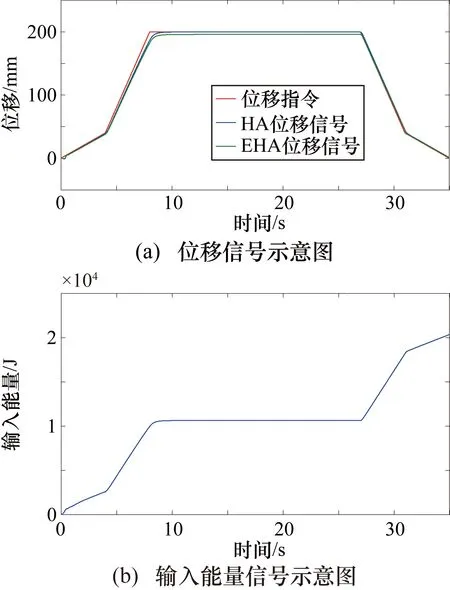
图10 模式1仿真结果示意图
2.2.2 模式2仿真结果分析
在Matlab/Simulink的控制器中设定异构作动系统在模式2下工作,仿真结果如图11所示。
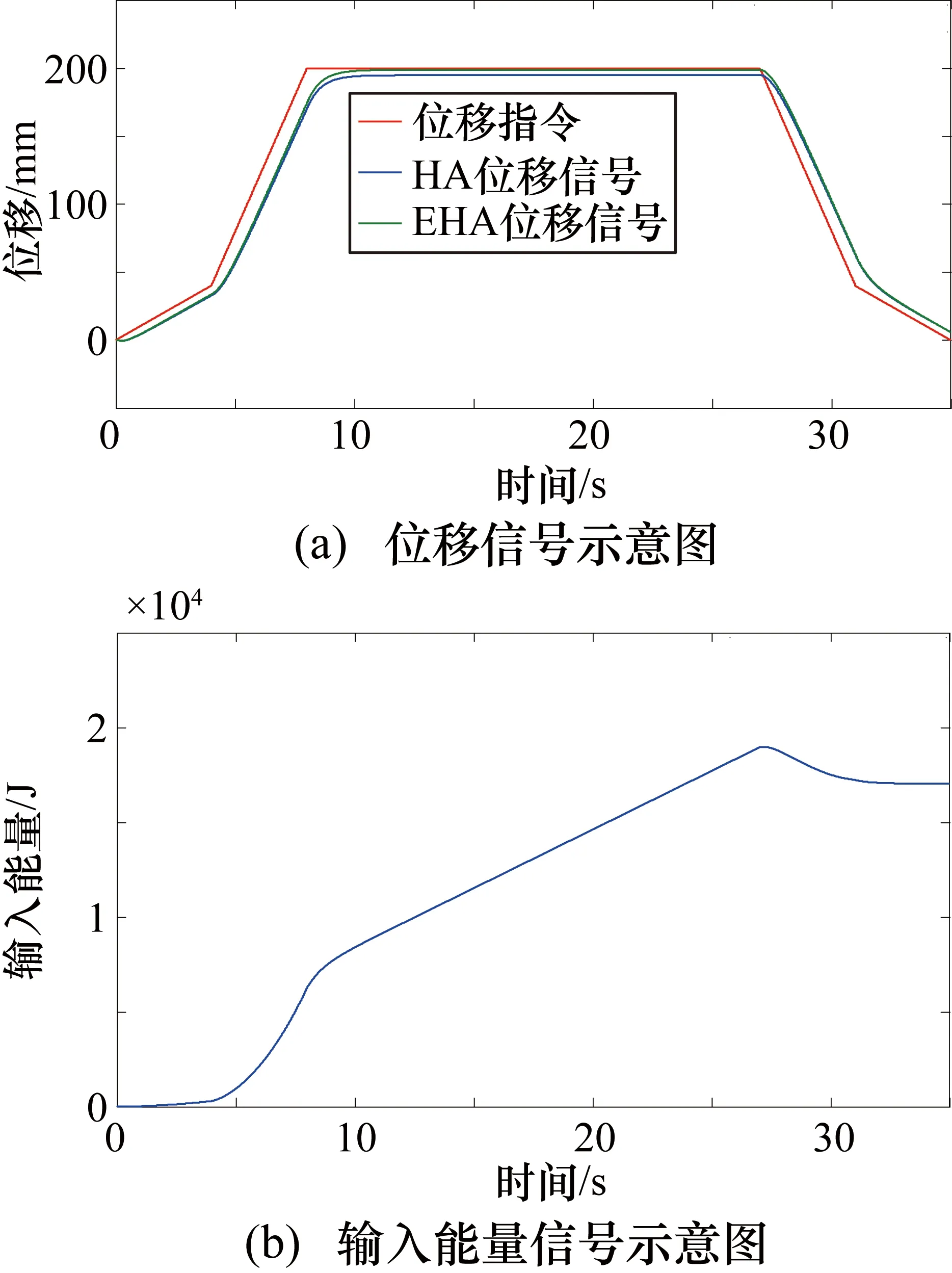
图11 模式2仿真结果示意图
2.2.3 模式3仿真结果分析
在Matlab/Simulink的控制器中设定异构作动系统在模式3下工作,仿真结果如图12所示。
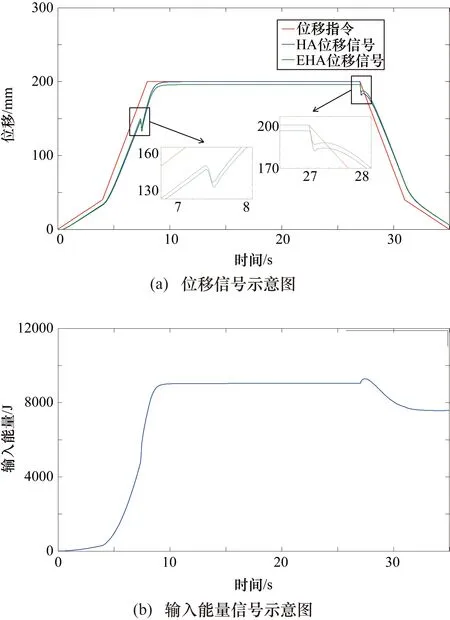
图12 模式3仿真结果示意图
从仿真结果不难发现,在输入能量方面,模式3较模式1和模式2有明显的优势,模式3输入能量仅为7570 J,模式1输入能量为20300 J,模式2输入能量为17100 J;在位移跟踪曲线方面,模式3较模式1和模式2有明显的劣势,在7.3 s时,模式3中异构作动系统发生了从状态1(EHA工作)到状态2(HA工作)的切换,位移跟踪曲线出现了明显的“抖动”现象,在27 s时,模式3中异构作动系统发生了从状态2到状态1的切换,位移跟踪曲线也出现了明显的“抖动”现象。
2.3 “抖动”原因分析
以状态1到状态2的切换为例,理想的切换场景如下。
① 切换次数唯一:发生切换前,有且仅有EHA工作;发生切换后,有且仅有HA工作;
② 平稳接管负载:发生切换前后,作动系统的输出力无变化,即HA “无偏差”地接替EHA进行工作。
2.3.1 切换次数分析
图13是异构作动系统的选通信号示意图,其中,“0”表示处于工作状态,“1”表示处于旁通状态。从图13中不难发现,在7.3~7.5 s内,HA和EHA的选通信号切换了7次,说明异构作动系统在状态1和状态2之间切换了7次,这对于异构作动系统而言,是难以接受的。
2.3.2 平稳接管分析
图14是模式3的输出力示意图。从图14(a)中不难发现,在7.3 s附近,异构作动系统工作于逆载状态,当输出力首次达到35000 N时,该作动系统从状态1切换至状态2,但由于切换的瞬间,输出力又小于35000 N,该作动系统又从状态2切换至状态1,如此反复,直至输出力稳定大于35000 N,因此,该作动系统的选通信号如图13所示。从图14(b)中不难发现,在7.3 s和27 s左右,异构作动系统发生了2次“硬性”切换,无论是HA的输出力还是EHA的输出力均发生大幅度的跳变。

图13 选通信号示意图
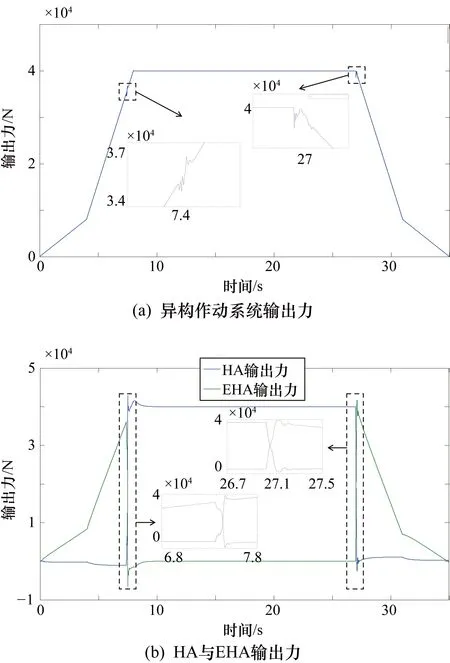
图14 模式3输出力示意图
定义输出力误差如下:
(2)
式中,Factual为实际输出力;Fideal为理论输出力;tstart为起始时间;tend为终止时间。
根据式(2)计算图14(a)中的输出力误差,ErrF约为1000 N。
3 平稳控制方法
3.1 解决思路
3.1.1 “频繁”切换的解决思路
“频繁”切换现象产生的原因在第2节中已经说明,是由于在切换的瞬间,异构作动系统的输出力在切换值(35000 N)附近来回变化,导致切换被“频繁”触发。
为了解决“频繁”切换的问题,本文提出一种方法:设置切换最小时间间隔,即当切换发生时,记录当前的时间,当下一次切换发生时,首先判断两次切换的时间间隔是否大于最小时间间隔,如果大于最小时间间隔,则允许这次切换发生,如果小于最小时间间隔,则“屏蔽”这次切换,具体流程如图15所示。
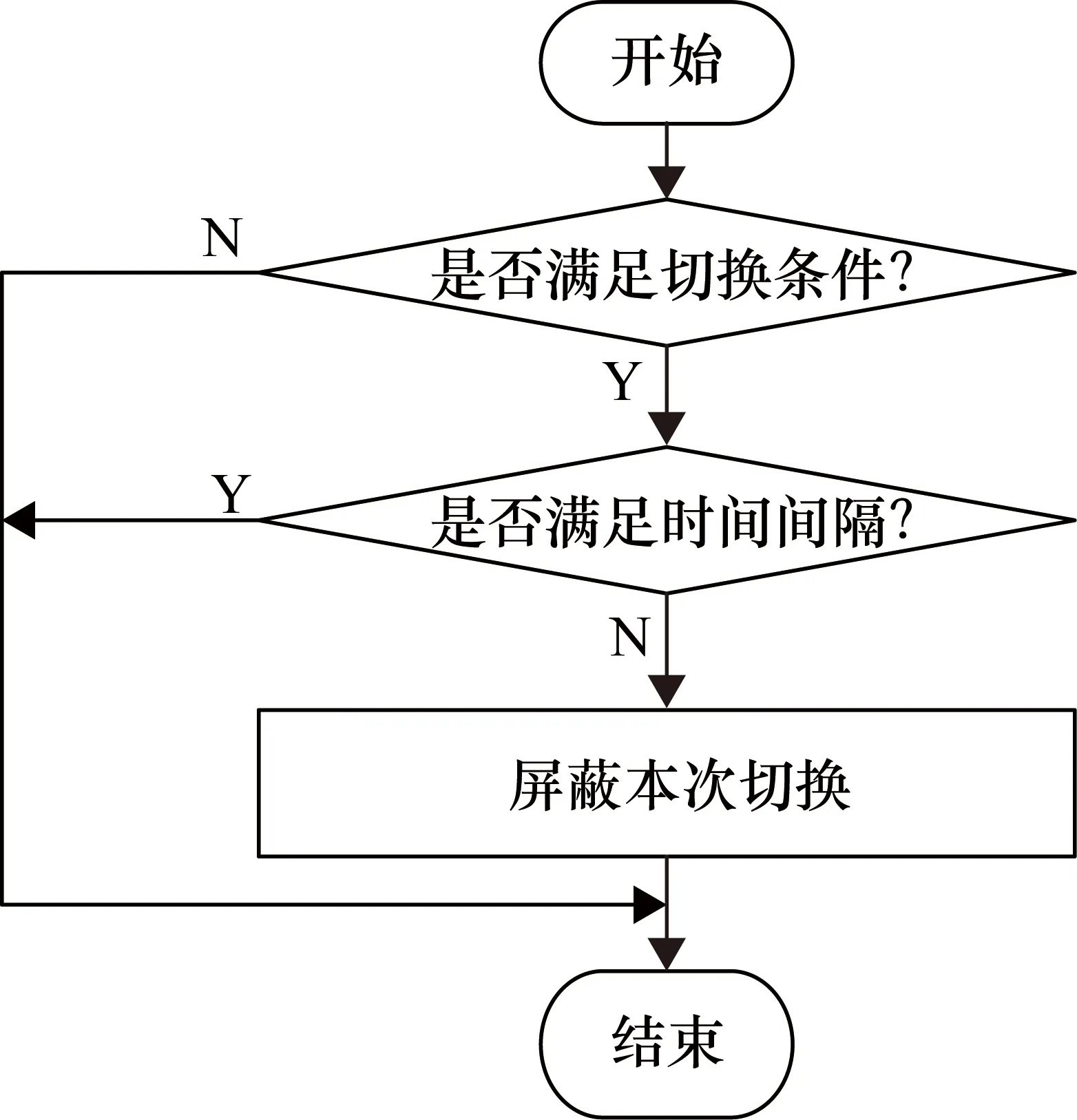
图15 第1步改进后控制器控制流程图
3.1.2 输出力跳变的解决思路
为了实现“平滑”的过渡,本文对模式3做进一步的改进,提出一种新的切换思想:以EHA切换至HA为例,当满足切换条件时,将异构作动系统从状态1切换至状态3,检测EHA上的输出力,当EHA上输出力较小时,再将该作动系统从状态3切换至状态2,这是一种“软性”的切换,如图16所示。
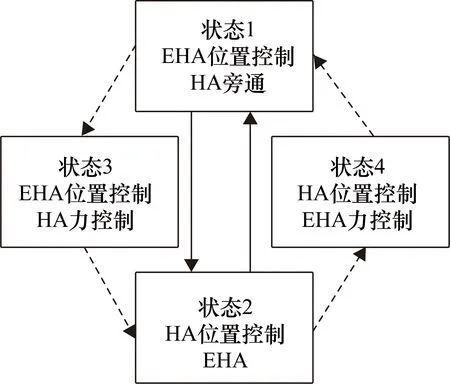
图16 第2步改进后切换思路示意图
3.2 仿真结果
图17是作动系统的输出力示意图,根据式(2),ErrF约为300 N,较改进前的模式3下降了70%。
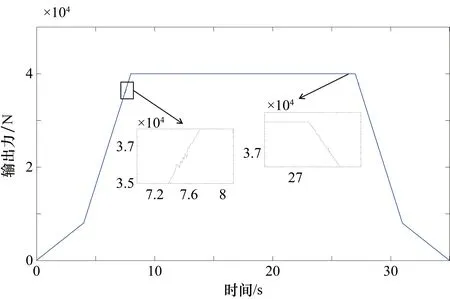
图17 异构作动系统输出力
图18是异构作动系统的位移信号示意图,从图中不难发现,由于模式3-改进型采用了“软性”切换,在7.3 s附近和27 s附近位移跟踪曲线较模式3有了很大的改善。
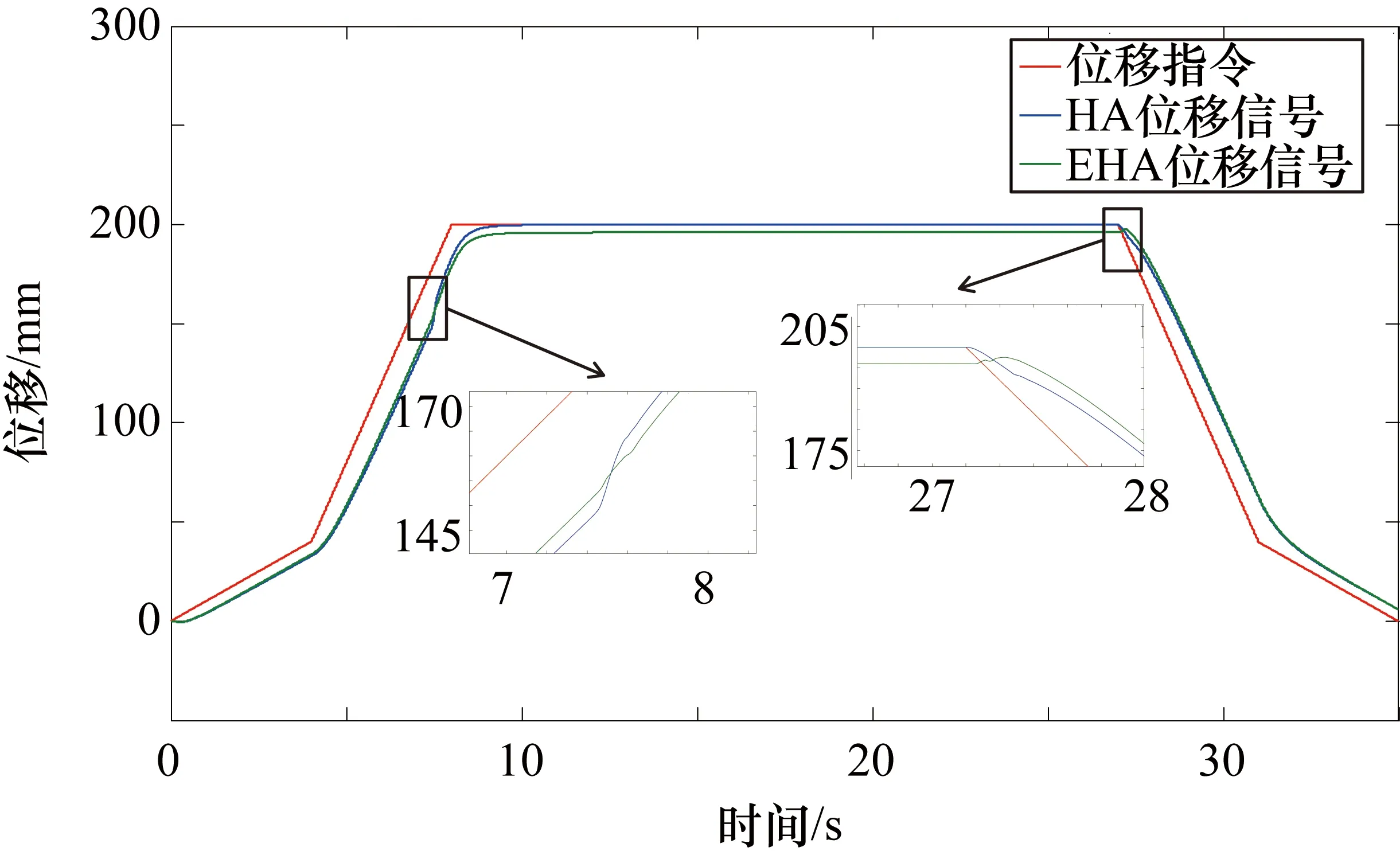
图18 异构作动系统的位移信号示意图
图19是3种不同模式的输入能量示意图,从图中不难发现,模式3-改进型与模式1和模式2相比,具有明显的优势,且保证了异构作动系统的平稳性,是最优的方案。
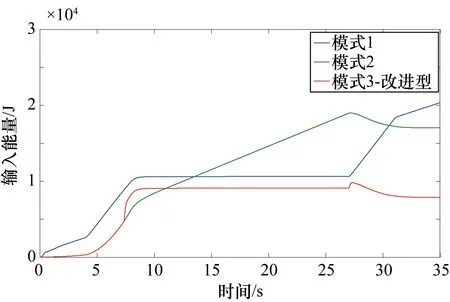
图19 3种不同模式的输入能量示意图
4 结论
本文对HA和EHA组成的异构作动系统进行研究,得到结论如下。
① 提出了一种新型的能量管理策略,选取位移跟踪特性和能耗特性为评价指标,分析表明:新型的能量管理策略在能耗特性方面有较大的优势,但在位移跟踪曲线上出现了“抖动”的现象,即在控制平稳性方面,表现出一定的不足;
② 造成“抖动”的主要原因包括“频繁”切换和输出力的大幅度跳变;
③ 针对“频繁”切换问题,提出了设置最小切换间隔的方法,仿真结果表明,该方法可以很好地解决“频繁”切换的问题,但对模式3中位移跟踪曲线出现的“抖动”现象并未起到明显的改善作用;
④ 针对输出力大幅度跳变问题,提出了“软性”切换的方法,仿真结果表明,该方法可以很好地解决位移跟踪曲线出现的“抖动”现象;
⑤ 综合考虑能耗特性和控制平稳性,改进后的模式3是异构作动系统的最优的工作模式。
