基于深度学习的智能分类垃圾桶∗
2021-06-02卢淑怡万思远
卢淑怡 魏 爽 万思远
(上海师范大学信息与机电工程学院 上海 200234)
1 引言
随着我国可持续发展政策不断深入,对建设美丽社会有了更高的要求,生态文明建设已成为我国发展建设中的重要战略部分。垃圾分类工作就是新风尚。当前社会对于垃圾分类的知识较为薄弱[1],对于垃圾处理的方法较为低效,因此我们应提高垃圾分类的自动化水平[2],以解决人为垃圾分类不准确、耗时较长等问题。
垃圾分类主要面临如下几个关键问题:
1)分类意识薄弱,群众习惯难以改变
人工分类需要群众具有垃圾分类的意识。当下公众的环保意识淡薄,长期养成的垃圾混装习惯难以改变,但是垃圾分类工作的开展需要群众积极主动参与。因此实现垃圾智能化分类是这一问题的解决方案。
2)垃圾种类繁多,实现准确分类存在困难
垃圾种类繁多,此外垃圾经由各种人为原因导致的不同形态是影响垃圾分类准确性的主要原因。人工分类的准确性主要取决于个人对垃圾类别的主观判断,且分类效率低下。因此,选择有效的分类方法是实现垃圾分类的重中之重[3]。
当前,上海市采用名称检索[4]的方式开展垃圾分类,这种方式通常基于事先设定的数据分类,能够辅助居民实现常见垃圾的分类,但是很难有效地包含现有所有的垃圾以及垃圾的不同状态,更难应对未来持续增多的垃圾种类。赵冬娥等[5]提出了基于高光谱成像来实现垃圾分类,通过建立识别分类模型对反射率光谱信息进行分析,实现了对高光谱图像中待分类垃圾的识别与分类,但是该方法仅对垃圾材质进行分类,难以满足当下复杂的垃圾分类需求。刘雅璇等[6]提出了基于自我训练的长效垃圾分类方法,采用KNN分类器和支持向量机结合,实现垃圾分类的智能化,但是仅仅帮助了用户了解特定垃圾的种类,不具备自动化分类功能。
周慧珺等[7]提出了基于单片机的智能垃圾桶,设计了桶盖的自动开关,遥控垃圾桶的行走,智能封袋的功能。梁婷等[8]采用了微电脑控制芯片,设计了具备智能红外感应系统的智能垃圾桶,实现了垃圾桶桶盖的自动开关和自动封口功能。戴礼骁等[9]设计了太阳能智能垃圾桶,实现了灭菌除虫、自动翻盖、语音功能和容量自动检测等功能。但是这些研究局限于垃圾桶的使用功能,不具备分类功能。
随着人们对于美好生活环境的需要日益提升,自动化垃圾分类技术亟待提升。针对当前研究存在的自动化分类功能不足,本文提出了一种基于深度学习[10~12]的智能分类垃圾桶设计。该设计具有以下两个创新点:
1)“Y”字型垃圾桶结构:传统的垃圾桶外观构造较为单一,无法实现进行自动化分类的功能。为实现自动化分类垃圾这一功能,本文以先检测,后回收为核心思想,提出了一种新的“Y”字型垃圾桶外观结构。
2)基于自动化分类的图像采集、深度学习模型与距离检测的三层框架:本文考虑到自动化分类这一功能的复杂性,设计了一个系统功能框架。该框架包括了图像采集层、深度学习层及距离检测和传输层。本文采用卷积神经网络[13~15]来应对垃圾类别的判断,从而实现了准确高效的垃圾自动化分类功能。
2 系统设计方案
本文所设计的垃圾桶系统设计图如图1所示。该系统由单片机作为主要控制模块,集成两大功能、四个模块为一体。两大功能包括自动化垃圾分类和满桶检测与提醒,四大模块包括舵机模块、深度学习模块、超声波模块和蓝牙模块。其中,自动化垃圾分类通过深度学习模块检测和舵机模块转动实现;满桶检测与提醒通过超声波模块检测和蓝牙模块通讯实现。
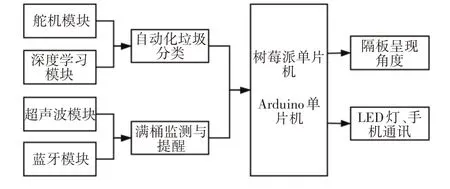
图1 系统设计图
结合本文对硬件外观和软件框架的设计,所提出的垃圾桶具体实现的功能如下:
1)自动化垃圾分类:摄像头获取丢入垃圾桶的垃圾图像,并上传至深度学习模块。由深度学习模块对于投放的垃圾进行识别,并将识别后的结果通过树莓派与Arduino的串口通信传输,使舵机模块带动隔板进行角度转动,将垃圾自动掉入相应的桶内。
2)满桶检测与提醒:由超声波模块对于桶内垃圾高度进行监测,当监测结果小于设定的满桶高度值时,智能垃圾桶顶部的LED灯将亮起,并通过蓝牙模块将信息传输给管理者,进行清理更换工作。
垃圾桶工作的流程图如图2所示。
3 硬件外观结构
为实现自动化垃圾分类这一功能,本文提出的智能垃圾桶物理结构设计采用“Y”字型结构,如图3所示。其中,顶部中央为摄像头,用于投入垃圾的图像拍摄。由两块隔板(3)将垃圾桶一分为二,分别为检测空间(1)和回收空间(2)。检测空间(1)包含垃圾桶的投放口,主要对于投放的垃圾进行初步的汇集与检测。回收空间(2)作为主要的垃圾收容桶,左边小桶负责收容可回收垃圾,右边小桶负责收容不可回收垃圾。隔板能够支撑投放的垃圾,并在检测出垃圾种类后,控制单个隔板向桶壁旋转。在垃圾桶上方汇聚检测完毕后,通过隔板(3)的转动进行隔离回收,实现垃圾分类的功能。
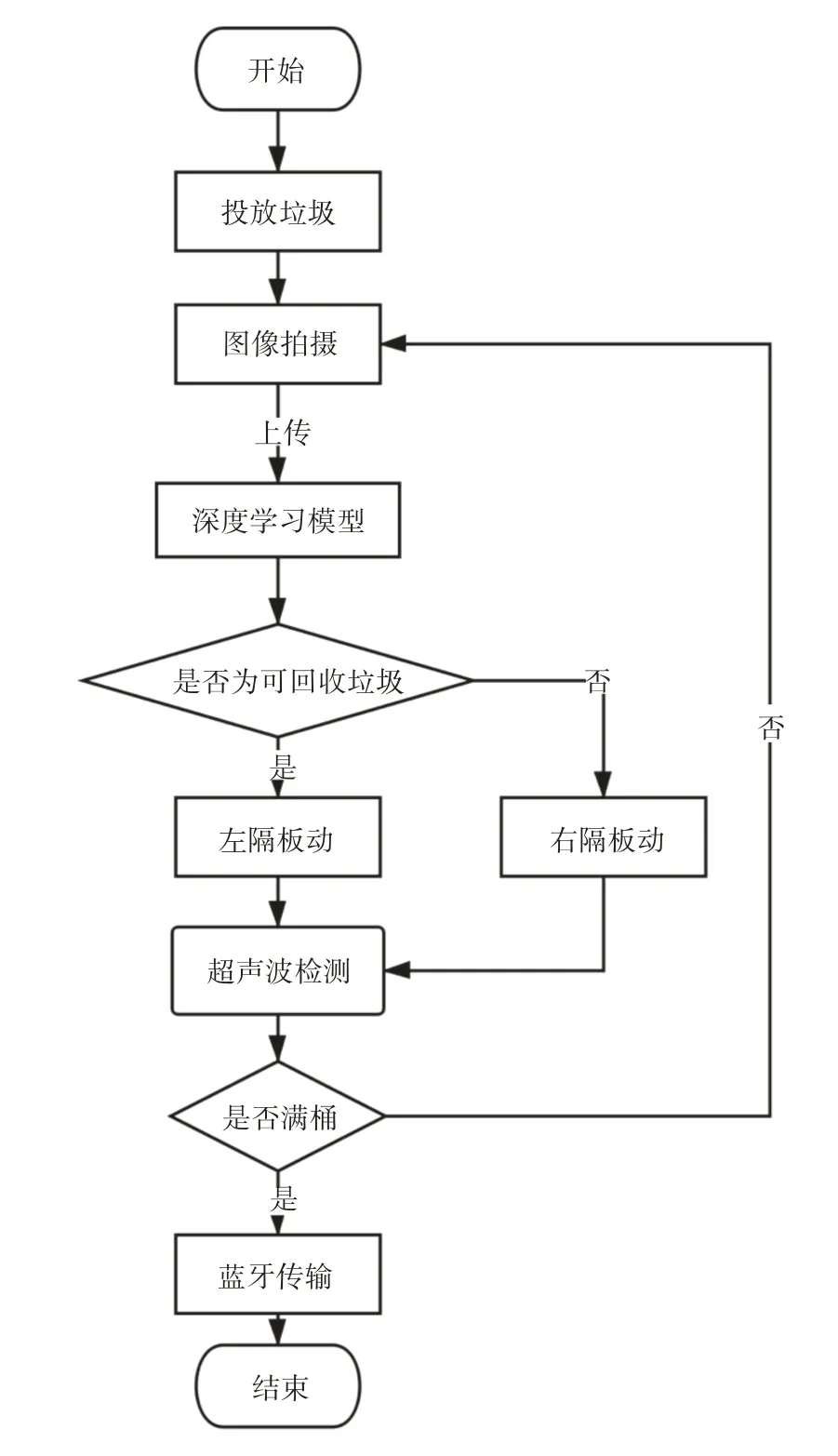
图2 工作流程图
为了防止垃圾中液体对识别的干扰,该垃圾桶两隔板间设有一条小的缝隙(4),使回收的液体流入,便于干湿垃圾的分离。隔板的上侧设有两个小水箱(5),实现隔板清洗的功能,解决了垃圾液体残留引发的恶臭和卫生问题。另外,垃圾桶底部设有用于存放垃圾袋的储物装置(6),便于环卫工人更换垃圾袋操作。
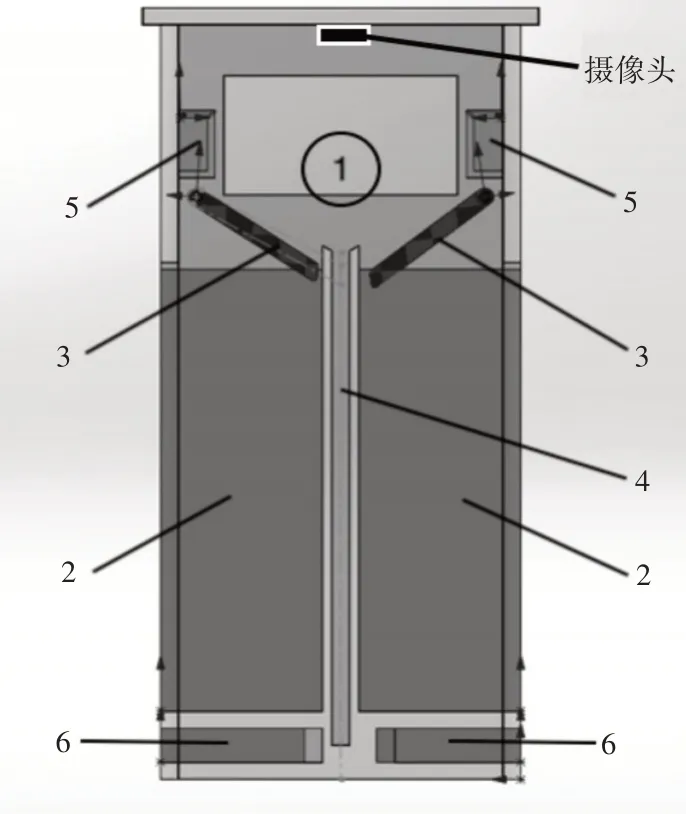
图3 智能垃圾桶物理模型图
4 软件框架设计
考虑到垃圾图像分类的准确性和实效性,本文针对垃圾桶系统功能设计了一个三层框架,其中包括获取图像层、深度学习层和距离判断与传输层。具体框架如图4所示。
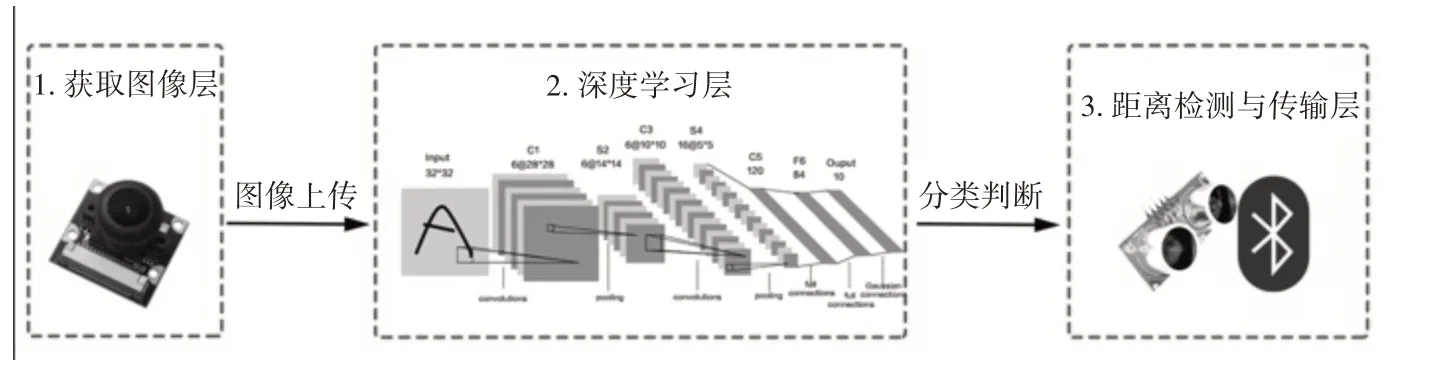
图4 系统框架设计图
首先,获取图像层通过摄像头拍摄扔进垃圾桶的垃圾图像,将图像上传到深度学习层后对垃圾类别作出判断,并投放到相应的内桶中。完成投放任务后,距离检测与传输层进行满桶检测和信息传输的功能。
4.1 获取图像层
针对户外垃圾检测的时效性需求,为进行实时的垃圾图像采集以及进行图像处理运算,本文采用了基于树莓派平台的图像获取方法:摄像头安置于智能分类垃圾桶顶部内侧,结合物理模型“Y”字型中的隔板,可直观地获取从垃圾投放口进入的垃圾图像。摄像头通过获取每一帧图像,用于后续的图像处理。并上传至服务器存储。为智能垃圾分类提供了新的可视化信息。获取的图像样式如图5所示。
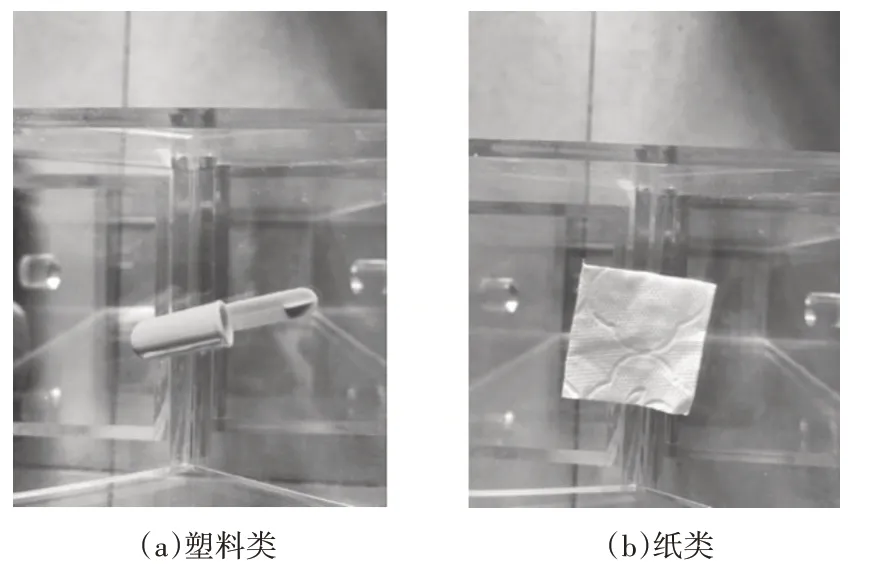
图5 摄像头获取图像
4.2 深度学习层
深度学习层接收来自获取图像层拍摄上传的图片,将图片进行灰度处理后放入已经训练好的深度学习模型中进行分类判断。目前存在许多种卷积神经网络结构,考虑到快速提取图像信息的这一点,本文所设计的深度学习模型采用LeNet-5网络结构。该模型具有凸显图像重要信息和减少计算量的特点,能够达到较为精准和快速的预测结果,符合自动化判断垃圾种类这一功能的要求。该模型结构如图6所示。

图6 深度学习模型图
1)卷积层(convolutions):卷积层起到提取所拍摄到的垃圾图像的不同特征,具体的卷积公式如下:

其中,代表模型第l层中第j个卷积输出的特征图像,Mj是输入特征图像的集合,代表第l层中第j个的权值,Bl是赋予第l层卷积的偏置项,f(·)作为非线性激励函数。
2)池化层(pooling):池化层是卷积神经网络中降采样的一种形式。其减小垃圾图像的空间大小,减少垃圾图像的计算量和参数数量。由于识别垃圾图像对时间上有着必要的要求,判别需要在一个较短的时间内,以免外界再有垃圾投入,导致两类垃圾判断错误的情况发生。本文所采用的池化公式如下:

3)全连接层(full connections):全连接层将本层的神经元逐一和上一层的所有神经元连接,起到分类器的作用,最终判断垃圾类别。
该深度学习层所设计的模型能实现较为精确和快速的预测结果,从而做出正确的分类决策。
4.3 距离检测与传输层
垃圾桶还配有超声波测距模块实现测距功能,其主要工作原理为该超声波模块接收到先前发出的特定超声波,并通过前后时间差,计算出到垃圾离超声波模块的距离(D)计算公式如下:

因此能在每一次投放垃圾过后进行实时超声波测距监测得到距离,当得到的距离小于10cm时,通过内置的蓝牙模块进行无线网络通讯,提高了环卫工人更换垃圾袋的工作效率。
如图7所示,超声波模块每隔一定时间调用一次测距函数,当箱内垃圾达到一定的高度时,则LED灯亮,进而达到闪烁的效果。

图7 超声波流程图
5 性能评估
本文所设计的智能分类垃圾桶能实现较为精确和快速的预测结果,从而做出正确的分类决策。本文所设计的深度学习网络的训练数据来自于第三世界政府提供的垃圾图像数据集,数据集包含2664张图像,包含的类别有易拉罐类、纸类、塑料类、湿垃圾类及其他类的5个类别。为验证模型的有效性,模型实验的样本准确性如表1所示。

表1 准确性测试表
6 结语
本文提出的基于深度学习的智能分类垃圾桶的设计方案,通过所设计的“Y”字型物理模型以及LeNet-5深度学习模型、舵机模块,超声波模块,蓝牙模块整合成的一个完整的系统,结合了人工智能、通信传输等技术,实现了垃圾的分类存放,满桶检测与提醒等功能,最终实现智能化垃圾分类。该系统将常见垃圾(如餐巾纸、塑料瓶等)进行了数据测试,证明了本文所提出的垃圾桶可以有效地提高垃圾分类率和环卫工人的工作效率,大量节省了人力资源,减少了环境资源的浪费,大幅提升了社会效益与经济效益,更加符合现代化智能标准。