含从动橡胶曲柄的机构动力学分析
2021-05-31江阴职业技术学院机电工程系江苏无锡市214405程寿国
(江阴职业技术学院机电工程系,江苏无锡市,214405)程寿国
1 引言
橡胶作为一种特殊的非线性材料一直是研究的热点。文献[1]研究了利用橡胶材料实验数据确定的非线性黏弹性本构方程材料参数的方法。文献[2]利用有限元方法建立了框架结构和橡胶隔震结构,讨论了隔震措施对位移、速度、加速度和层间位移角响应的影响。文献[3]建立了含橡胶连杆机构的刚柔混合模型,研究了滑块的动力学响应和讨论了系统的运动稳定性。文献[4]探讨了含橡胶连杆机构运动过程成对机体的振动影响。本文将研究从动曲柄为橡胶材料时刚性连杆的运动行为。
2 含从动橡胶曲柄机构简介
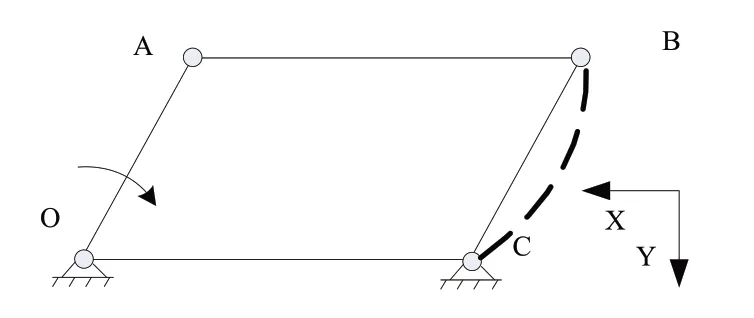
图1 含从动橡胶曲柄机构示意图
图1是含从动橡胶曲柄机构示意图,其中OA杆和BC杆长度为90mm,AB杆OC杆长度为230mm,OA杆的驱动速度为300r/min。BC杆(从动曲柄)分两种情况考虑:如果视机构为全刚体模型BC杆长度不变;如果激活BC杆为橡胶材料的柔性体,B铰和C铰的力的作用下运动过程中它的长度不断地变化。
3 含从动橡胶曲柄机构的连杆动力学响应
图2为机构中连杆质心的Y方向位移曲线。从图2中可以看出,刚柔耦合分析时与全刚体分析时位移的区别较小,在波峰和波谷附件波动大一些。
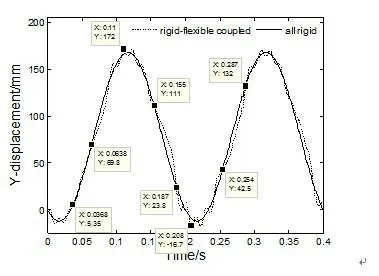
图2 机构中连杆质心的Y方向位移曲线
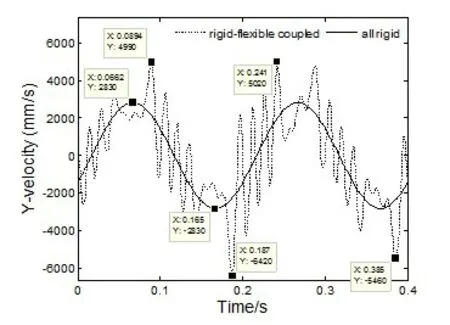
图3 机构中连杆质心的Y方向速度曲线
图3为机构中连杆质心的Y方向速度曲线。从图3可以看出连杆在两种情形下速度的变化很大。全刚体情况下速度最大值在2830mm/s左右,刚柔混合情况下速度最大数值上在6420mm/s,而且波动一直比较明显。
图4为机构中连杆质心的Y方向加速度曲线。从图4可以看出连杆在两种情形下的加速度数值区别很大。从图中不能看出明显的运动周期。图5为连杆lyapunov指数谱,通过WOLF法计算最大lyapunov指数值为0.0 454,可以说明连杆的运动是混沌的。
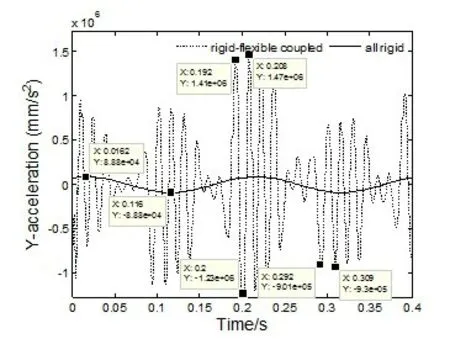
图4 机构中连杆质心的Y方向加速度曲线

图5 连杆lyapunov指数谱
4 结论
本文通过有限元方法和动力学仿真方法建立含从动橡胶曲柄机构的刚柔混合模型。对比分析了全刚体模型和刚柔混合模型的动力学响应,通过计算最大lyapunov指数判断含从动橡胶曲柄机构的连杆运动是混沌的。
