基于合作自主定位的群体模式自动生成方法
2021-05-29王诏君蔡堉伟黄华兴宁为博董朝晖李文姬朱贵杰谷敏强朱晓敏包卫东
范 衠 ,王诏君 ,石 泽 ,王 琛 ,王 柳 ,蔡堉伟 ,黄华兴 ,宁为博 ,董朝晖 ,李文姬 ,朱贵杰,李 恪,李 兵,谷敏强,朱晓敏,包卫东
(1.汕头大学电子系,广东 汕头 515063 2.汕头大学广东省数字信号与图像处理技术重点实验室,广东 汕头 515063 3.汕头大学数学系,广东 汕头 515063;4.国防科技大学系统工程学院,长沙 410073)
1 引 言
工程技术的不断发展推动了机器人技术的快速进步,机器人开始广泛应用于工业、医疗、军事等领域.对于复杂应用场景,多机器人协作逐渐成为提高任务执行效率的有效途径.传统的中心控制方式根据系统状态对所有机器人行为进行统一规划,一定程度上解决了多机器人协同问题.但当系统规模较大时,中心控制方法面临诸多挑战,如容错能力不足,少数个体故障可能导致系统功能失效;计算开销急剧增大,难以对突发因素作出及时响应;系统动态调节能力有限,难以根据系统规模变化进行适应性调整等.受自然界生物集群现象启发,集群机器人旨在通过自组织协同控制方式使多机器人系统具备高效完成复杂任务的能力,从而为上述困难的解决提供了可行方案[1-2].
根据集群行为特点及可完成的集群任务类型,集群机器人研究可分为3类:集群模式、集群导航、集群决策.特别是,集群模式形成作为实现上述任务的基本功能已经得到了相当多的关注,大致可以分为四类:1)基于行为的控制,在单个机器人上实现一组期望的具有相对重要性的行为[3-4];2)基于领导者-追随者模型,即确定了领导者,追随者应该追随领导者,并有刚性或宽松的阵型约束[5-6];3)基于势场模型,机器人沿着势场的梯度移动,势场是吸引力和排斥力的总和[7-8];4)基于生物启发方法,机器人控制模型来自生物系统,如信息素/激素模型[9-10]或基因调节网络(GRN)模型[11-12].
现有的大多数群体模式形成算法的一个重要局限性是目标形状需要预先定义,只形成少量的简单几何形状,可能无法满足未知复杂环境的需求[13].为了缓解这个问题,Beta和Kumar[14]提出了一种针对大量机器人的编队控制方法.在这个工作中,虽然目标形状可以通过改变形状大小来适应环境的变化(以一个狭窄的隧道通过场景为例),但是只考虑了两个简单的形状,最终形成的形状导致机器人在形状内部松散分布.Cheah等[15]引入了一种基于势场的机器人群体形状控制,即群体中的每个机器人都停留在一个移动区域内,彼此之间保持最小的距离.他们考虑了不同形状的不等式函数的组合与收敛分析.然而,目标形状的复杂性仍然是有限的,并且目标形状必须预先定义.
然而,目前基于层次GRNs的框架的群体模型生成算法都假设群体机器人位置信息通过全局定位获得的.但是在实际应用中,由于群体机器人所用的里程计等传感器往往存在误差和外界环境的干扰,导致基于全局坐标系的群体机器人位置信息很难准确获得[16].此外,在群机器人系统中,借助与相邻机器人的局部通信实现自身定位是一种常见的做法.如文献[17]假设群体机器人之间存在分散的全局位置感知参考点;文献[18]含有一个静止且固定位置的群体机器人作为其他群体机器人的参考点.这些算法都含有一个基本假设是它们具有预定的位置或配备定位系统[19],再或者一些机器人向目标移动,另一些保持不动,为移动机器人提供位置信息[20].如果没有这样的假设,群中的其他机器人将无法正常工作.对于围捕任务来说,在群集系统中侦测到目标的群体机器人与邻域群体机器人之间局部合作可以获得相对位置和航向信息,再把相关信息传递到通讯范围内的其他群体机器人,从而实现对目标自适应的围捕和群体形态的生成.换句话说,群体机器人不用知道整个环境里的信息,只用知道目标周围环境信息.群体机器人只用构建关于目标周围的坐标系,获得目标和目标周围环境位置信息.为此,我们提出一种基于合作自主定位的群体模式自动生成方法.该方法设计一个三层基因调控网络模型.首先,第一层为局部坐标系的构建,即当群体机器人侦查到目标后,群体机器人根据其传感器获得的局部信息或与邻近群体机器人通过局部协调建立局部坐标系.紧接着,通过群体机器人的局部感知获得目标和障碍物相对位置信息.第二层结构为自适应群体模式生成,即它能够根据目标位置信息和群体机器人检测到目标周围环境信息作为输入,从而生成各种复杂的群体模式.第三层负责引导群体机器人移动到第二层生成的群体形态.
本文的其余部分组织如下.第二部分提供了详细的问题陈述,并列出了该模型工作的一些假设.第三部分给出了本文提出方法详细描述.第四部分通过多种仿真场景对本文提出的方法进行评估.最后,第五部分对本文做出总结.
2 问题陈述和假设
本文主要研究利用基因调控模型生成群体形态在障碍物环境中对目标围捕.目标围捕任务主要包括两个步骤:1)生成包围目标的群体形态;2)控制群体机器人移动到群体形态上.值得注意的是,在生成群体形态时,群体机器人需要根据目标的数量和目标周围环境生成合适的群体模式.尤其是,当目标从障碍物中移动时,群体形态可以根据目标位置和目标周围环境的不同自适应对目标进行围捕.在群体机器人围捕目标时,群体机器人需在没有集中控制的情况下将自己部署到生成的群体模式上.与文献[21]类似,群体机器人被分为两类:1)组织机器人(可以检测到至少一个目标并负责模式生成);2)非组织机器人(尚未检测到任何目标).更具体的说,非组织机器人跟随邻近的组织机器人获取目标信息,直到自己检测到目标.
本研究做了以下几个假设:
1)在群体机器人携带的传感器感知范围内,群体机器人可以通过其传感器感知到自身与邻居群体机器人、目标和障碍物之间的距离;
2)在通信范围内,群体机器人之间可以无障碍的快速通信.因为对于移动的群体机器人来说,如果定位过程的计算和通信太慢,无法与群体机器人的位移兼容,那么传感器得到的数据就会变得非常不准确,所以群体机器人之间必须无障碍的快速地通信.
3)群体机器人移动速度大于目标移动速度.因为如果群体机器人移动速度太慢就无法保证群体机器人追上目标且对于目标进行围捕.
在本文中,为了衡量本文提出的方法性能,本文定义以下指标(如收敛误差φs(g)和分布误差Ds),具体如下:
● 收敛误差φs(g):


● 分布误差Ds


3 基于合作自主定位的群体模式自动生成方法
在实际应用中,由于群体机器人所用的里程计等传感器往往存在误差和外界环境的干扰,导致基于全局坐标系的群体机器人位置信息很难准确获得.对于围捕任务来说,群体形态形成主要受目标周围环境的影响.为此,我们提出一种基于合作自主定位的群体模式自动生成方法,该方法的一般结构图如图1所示.从图1中可知,该方法分为三部分:1)群体机器人相互协作自主定位;2)基于局部信息的群体形态自动生成;3)群体机器人分布式自主控制策略.

图1 基于合作自主定位的群体模式自动生成方法的示意图
3.1 群体机器人之间合作自组织协同定位
在群体机器人系统中,每个群体机器人都能够测量它与通信范围内的机器人的距离.群中的每个群体机器人都可以看作是图2中的一个节点.如果节点B在节点A的通信范围内,则图中的节点A链接到节点B.基于所有群体机器人的通信范围相等的假设,通信图的链接是双向的.如果一个节点在邻域内已知三个距离的局部节点,则它能够使用三点定位的方法计算出自己的相对位置.值得注意的是,我们假设在群体机器人系统中机器人是适当分布的,以便在通信范围内被连接,即每个节点与其他节点有两个以上的链接,如图2所示.这样在群体机器人系统中群体机器人相对位置信息就可以通过三点定位方位计算出来.

图2 群体机器人系统构成的通信图
为了建立局部坐标系,我们首先确定坐标系的中心.对于围捕任务来说,我们假设第一个侦测到目标的机器人称为中心机器人(o-robot),它所在的位置被设置为(0,0).然后,我们需要确定所建立的坐标系的x轴.离中心机器人最近的邻居机器人记为x-robot,且o-robot到x-robot的方向设为x轴的正方向.尤其是,o-robot利用自身传感器检测到x-robot的距离(dox)后,x-robot的位置设置为(dox,0).最后,我们要确定所建立的坐标系的y轴的正方向.我们把在o-robot和x-robot通信范围交集的区域里的机器人记为y-robot.该机器人还需要满足:它不应该在x-bot和o-robot的连接线上,即它不应该在x轴上.y-robot所在的一侧建立y轴的正方向.图3展示了建立局部坐标系的示意图.

图3 建立局部坐标系的示意图
值得注意的是,当多个机器人出现在o-robot和x-robot通信范围交集的区域时,通过式子(3)来确定y-robot.

其中,dcx和dci分别是o-robot到x-robot和机器人i的距离,dix是机器人i与x-robot之间的距离.


到目前为止,通过o-robot、x-robot和y-robot确定局部坐标系,这将使所有能够与这三个机器人通信的机器人都能够使用三点定位方法确定它们的相对位置.同样的方法,可以计算出在该群体机器人系统的探测范围内的目标位置和障碍物位置信息.值得注意的是,目标位置和障碍物位置信息将作为本文提出的基于合作自主定位的群体模式自动生成方法的第二层的输入.
需要说明的是,由于群体机器人在运行的过程可能会被障碍物分成多个子群体机器人系统,为此,我们将从以下三种情况进行分析,如图4所示.

图4 三种建立局部坐标系的情况
图4 (a)展示了当群体机器人系统被分成两个子群体,且仅仅一个子群体发现目标时,发现目标的子群体通过三点定位方法建立关于目标的局部坐标系.没有发现目标的子群体通过随机游走策略去发现目标或者与发现目标的子群体的通信范围重合.图4(b)展示了当群体机器人系统被分成两个子群体,且都发现目标但它们的通信范围不重合时,这两个子群体分别使用三点定位策略建立各自的局部坐标系.图4(c)展示了当群体机器人系统被分成两个子群体,且都发现目标和它们的通信范围重合时,它们共用一个局部坐标系.
3.2 基于局部信息的群体形态自动生成方法
基于检测到的目标的位置,群体形态将由第二层中的基因调控函数生成.自适应群体形态生成过程包括两个步骤:i)根据基因调控函数形成一个形态梯度空间;ii)提取梯度值大于阈值的等势线为生成的群体形态.
在群体模式生成过程中,侦测到目标的机器人将通过公式(5)-(9)生成关于目标的形态梯度空间.在式(5)-(6)中,γi和βj都是标量值,它们分别表示为目标和障碍物输入.i为第i个目标和j为第j个障碍物.值得注意的是,γi和βj分别在目标和障碍物所在的位置为一个恒定的正数,且其他位置为零(即无目标和障碍物的位置为零).

其中,Ti代表由第i个目标在环境输入(γi,目标位置信息)下产生的蛋白质浓度.Oj代表由第j个障碍物在环境输入(βj,障碍物位置信息)下产生的蛋白质浓度.T和O分别为所有目标和障碍物产生的综合蛋白质浓度.为Laplacian算子,定义为Ti和Oj所在形态梯度空间的二阶导数,可视为生物系统中的蛋白质扩散过程.M定义为考虑障碍物情况下目标所形成的形态梯度空间.值得注意的是,当目标周围没有障碍物时,式子(9)将简化为式子(11).此外,θ和k为调控参数.

现在,让我们简单解释一下M是如何基于目标和障碍物信息形成形态梯度空间的.为了简单起见,我们假设环境中只有一个目标和目标周围只有一个障碍物.首先,目标和障碍物所在位置分别输入一个常数γ和β.然后,T和O通过式(9)建立了关于目标和障碍物的形态浓度空间,且离目标和障碍物越远而衰减,如图5(a)和5(b)所示.特别是,通过式(9)的作用,可以将目标和障碍物形成的浓度场呈现相反的状态,即离目标越近浓度越低,离障碍物越近浓度越高,如图5(c)所示.
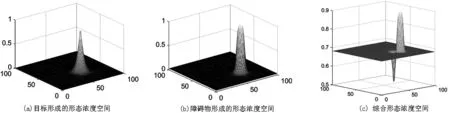
图5 T和O分别建立的蛋白质浓度场,通过式子(9)拟合后建立的综合蛋白质浓度场
3.3 群体机器人分布式自主控制策略
本文提出的方法的第三层用于引导和控制群体机器人到第二层生成的群体形态上.由于这个部分是被文献[21]和[22]证明可以有效地指导群体机器人移动到群体形态上,为此,本文采用同样的方法控制群体机器人,具体如下:
其中,i为第 i个机器人.Gi,x和 Gi,y代表第 i个机器人的 x 轴和 y 轴上的位置.Pi,x和 Pi,y是第i个机器人的两个内部状态.r为机器人的通信距离.a、b、c、r和m为参数.Di为第i个机器人附近的邻域机器人的数量.更具体的来说,Di,x和Di,y分别为第i个机器人到邻居机器人综合方向上x轴与y轴的分量.zi,x和zi,y分别为第i个机器人到目标方向上x轴与y轴的分量.此外,式(14)和(15)的作用是使群体机器人均匀地分布在群体形态上,换句话说,有助于避免群体机器人之间避碰和机器人与目标碰撞.
4 仿真结果与分析
在本节中,我们将通过三种仿真实验来验证本文提出方法的有效性.这三种实验分别为:1)无障碍物的情况下围捕静止的目标;2)含有障碍物的情况下围捕静止目标;3)含有障碍物的情况下围捕动态目标.
仿真实验参数如下设置:
a)仿真场景大小:20*20;
b)群体机器人个数:20;目标个数1个;
c)目标的移动速度是群体机器人移动速度的0.5倍.在本文中,目标移动速度设置为0.5,群体机器人移动速度为1;
d)由于本文针对围捕任务,所以假设群体机器人已知目标的大概方位.
4.1 无障碍物的情况下围捕静止的目标
图6 展示了群体机器人在无障碍物的环境下包围静止目标的过程.在图6(a)中,当群体机器人刚发现目标时,发现目标的机器人通过通信将信息传输给邻居机器人,并且与邻居机器人协同合作建立局部坐标系.通过此局部坐标系下,目标位置信息被计算出来,再利用本文提出的方法自动生成了关于目标的群体形态.由于本文使用的基因调控网络模型产生的浓度场呈现出离目标越近浓度越低的现象,所以为群体机器人移动至目标提供了方向信息,即起到指引群体机器人围捕目标的作用.图6(a)~6(d)展示了群体机器人包围目标的整个过程.在这个过程中,群体机器人沿着群体形态向两边移动逐步包围目标,最后群体机器人基本稳定在群体形态附近.

图6 群体机器人在无障碍物的环境下包围静止目标的过程
图7 展示本文提出的算法在无障碍物环境中控制群体机器人包围静止目标时,群体机器人随时间步长收敛到群体形态情况和群体机器人随时间步长在群体形态均匀分布情况.通过对图7(a)和图7(b)分析发现,由于刚开始时群体机器人没有发现目标,导致没有收敛误差和分布误差.由于群体机器人发现目标是逐个发现的,所以导致收敛误差和分布误差值很大.随着群体机器人运动到群体形态附近,收敛误差和分布误差逐渐减小,直到0附近,即群体机器人最后移动到群体形态上和在群体形态上均匀分布.
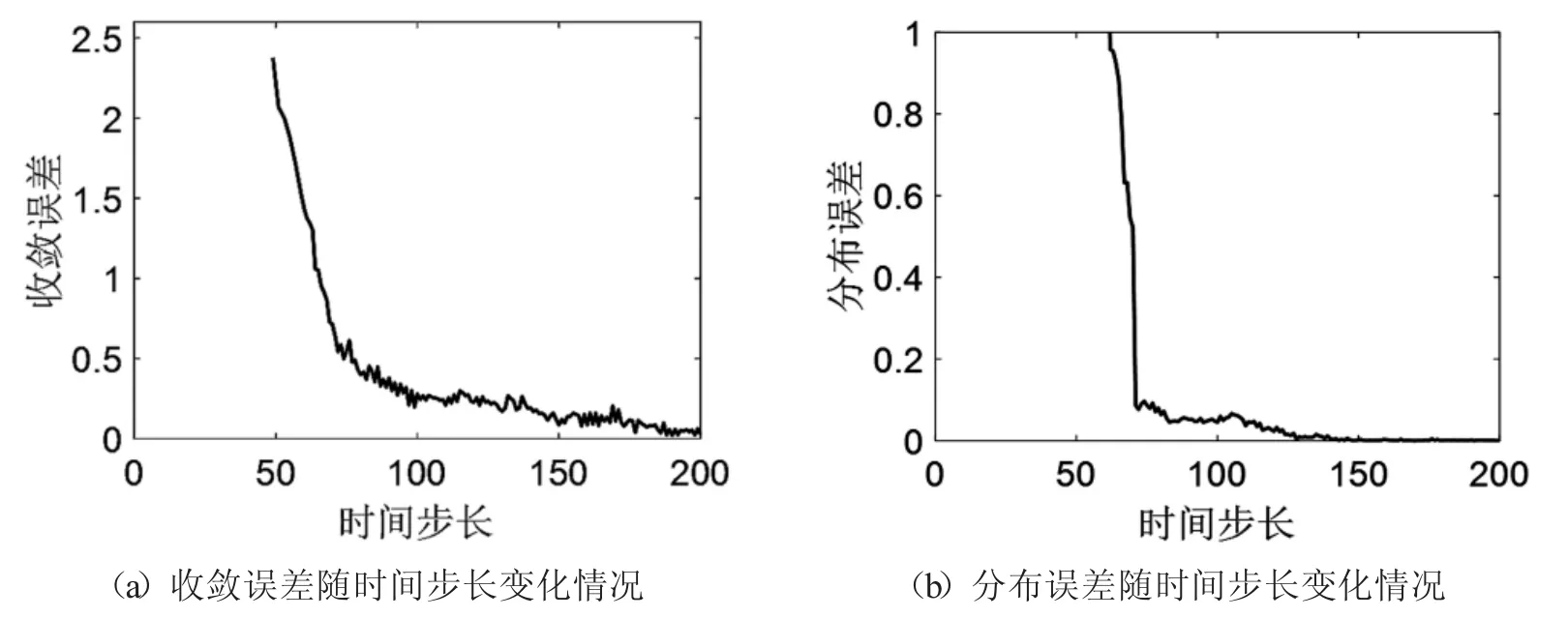
图7 在无障碍物的环境下,群体机器人包围静止目标时,两评价指标随时间步长变化情况
4.2 含有障碍物的情况下围捕静止目标
图8 展示了群体机器人在含有障碍物的环境下包围静止目标的过程.通过对图8(a)分析可以知道,当群体机器人刚发现目标时,由于群体机器人只探测出目标周围一部分信息,所以此时群体形态尚处于雏形.随着群体机器人向目标移动,探测到目标周围的障碍物越来越多.群体形态受探测到障碍物的影响,逐步发生形变,使之适应目标周围环境,如图8(a)~8(d)所示.值得注意的是,由于群体机器人没有类似与避障的传感器,群体机器人避障全靠浓度梯度指引.本文提出的基因调控网络模型使目标产生的浓度场和障碍物产生的浓度场呈现相反的表达状态,即离目标越近浓度越低,离障碍物越近浓度越高.由于群体机器人向浓度低的方向移动,就可以保证群体机器人在围捕目标的同时避开障碍物.

图8 群体机器人在含有障碍物的环境下包围静止目标的过程
图9 展示本文提出的算法在障碍物环境中控制群体机器人包围静止目标时,群体机器人随时间步长收敛到群体形态情况和群体机器人随时间步长在群体形态均匀分布情况.通过对图9(a)和图9(b)分析发现,由于刚开始时群体机器人没有发现目标,导致没有收敛误差和分布误差.随着群体机器人逐步发现目标,并向目标移动,收敛误差和分布误差逐渐减小.但是由于目标周围含有障碍物,在障碍物影响下,导致群体机器人不能完全收敛到群体形态上,如图9(a)所示.又因为群体机器人是移动,群体机器人探测到目标周围的环境越来越多,群体形态也会逐步发生形变,所以导致群体机器人无法完全在群体形态均匀分布,如图9(b)所示.
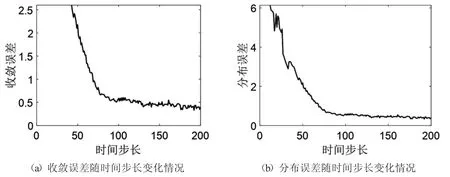
图9 在无障碍物的环境下,群体机器人包围静止目标时,两评价指标随时间步长变化情况
4.3 含有障碍物的情况下围捕动态目标
图10 展示了群体机器人在含有障碍物的环境下包围动态目标的过程.该场景在上一个场景的基础上加入含有倒钩的通道,其目的是验证本文提出的方法动态生成群体形态的鲁棒性,即如果本文提出的方法产生的群体形态不能适应该场景,则造成群体机器人陷入到倒钩性障碍物中,导致群体机器人不能很好围捕目标.图10(a)~10(d)展示了当目标穿过含有倒钩的通道时,本文提出的方法产生的群体形态自动调节其形态使之适应目标周围环境,从而避免了群体机器人陷入到障碍物中.图10(e)~10(i)展示了目标周围出现不规则障碍物时,本文提出的方法产生群体形态也能自适应调节其形态,从而围捕目标的过程.

图10 群体机器人在含有障碍物的环境下包围动态目标的过程
图11 展示本文提出的算法在障碍物环境中控制群体机器人包围动态目标时,群体机器人随时间步长收敛到群体形态情况和群体机器人随时间步长在群体形态均匀分布情况.通过对图11(a)和图11(b)分析发现,由于目标是运动的,目标周围环境也是不停改变的.所以群体机器人探测到的目标环境也是时刻改变的,从而导致群体形态也是动态变化的.当目标周围环境变化较大时,导致群体形态变化也是剧烈的,所以收敛误差幅度较大,如图11(a)所示.虽然群体形态变化较大,但是群体机器人始终在目标周围分布了,所以分布误差变化不大,如图11(b)所示.

图11 在无障碍物的环境下,群体机器人包围静止目标时,两评价指标随时间步长变化情况
5 结 论
本文提出一种基于合作自主定位的群体模式自动生成方法,用于群体机器人围捕目标任务.在该方法中,群体机器人通过自身与邻居机器人相互协作实现自主定位,并获得目标和障碍物位置信息.然后,利用本文提出的基因调控网络模型生成的群体形态引导群体机器人围捕目标和躲避障碍物.该方法的最大优点是在实际环境中,群体机器人不用定位传感器来定位自身位置信息,避免了定位传感器带来的误差对群体机器人围捕目标时的影响.此外,该方法也使得群体机器人不需要方向感知传感器和避障传感器,方便了该方法移植到极简群体机器人系统中.紧接着,通过多种仿真实验验证了本文提出的方法可以根据目标周围环境的不同自动调节群体形态,即围捕目标的群体形态随目标周围障碍物的分布变化而自适应的改变,避免了目标逃逸.
