基于YOLOv3-CIoU的松材线虫病树检测方法研究
2021-05-28李凤迪申卫星吴杰芳孙丰刚徐力刘振宇兰鹏
李凤迪,申卫星,吴杰芳,孙丰刚,徐力,刘振宇,兰鹏*
基于YOLOv3-CIoU的松材线虫病树检测方法研究
李凤迪1,申卫星2,吴杰芳3,孙丰刚1,徐力2,刘振宇4,兰鹏1*
1. 山东农业大学信息科学与工程学院, 山东 泰安 271018 2. 泰山森林病虫害防治检疫站, 山东 泰安 271000 3. 泰山学院数学与统计学院, 山东 泰安 271000 4. 山东农业大学植物保护学院, 山东 泰安 271018
松材线虫病被称为松树的癌症,及时发现并处置松材线虫病树是防止疫情扩散的重要手段。人工踏查、遥感影像等手段难以有效满足复杂林区疫情监测的需求。为快速、准确发现松材线虫病树,提高处置效率,本文提出了一种基于改进YOLOv3算法的松材线虫树检测方法。首先,使用小型无人机机载高分辨率数码相机在不同空间位置采集松材线虫病树图像并构建Pascal VOC数据集;随后针对YOLOv3算法存在训练过程IoU置空、平均损失下降缓慢等问题,提出了改进的YOLOv3-CIoU方法,使算法训练快,在小数据量时即实现高精度检测;最后通过高性能计算平台对改进的YOLOv3-CIoU模型进行训练测试,并与其他方法进行对比分析。结果表明:改进后的YOLOv3-CIoU模型在测试集上准确率达98.88%,较YOLOv3算法提升5%以上;在移动终端上平均单张图像检测速度为0.32 s,较改进前提升13%。与Faster R-CNN、SSD等方法相比,改进算法在模型检测准确率、缩短模型训练时间、目标边缘框定精度等方面也有较大提升。因此,改进后的YOLOv3-CIoU模型在多个评估指标中具有良好的性能,可有效提高松材线虫病树检测效率,对降低松材线虫病树监测投入,保障林区防疫监测精准高效具有重要的实际意义。
松材线虫病树; YOLOv3-CIOU; 目标检测
松材线虫病是松树的一种毁灭性病害,具有极强的传染性和致病性,被称为松树癌症,是目前世界范围内最具危险性、毁灭性的林区疫情之一。自上世纪八十年代传入我国以来,虽经全力防控,但该病害依然呈现大范围、多区域爆发趋势。目前全国已有18个省发生疫情,影响约1.98×1010m2林区,并向西、向北快速扩散。多个国家重点风景区和重点生态区已报告发现松材线虫病疫情,造成的经济损失和生态服务价值损失难以估计。因此,防疫工作迫在眉睫。
及时发现并处置松材线虫病树是阻断疫情扩散的重要手段。染病后,松树因叶茎堵塞而脱水枯死,松针也快速变成黄红色,这为快速排查松材线虫病树提供了重要的辅助信息。目前,林区主要依靠卫星遥感、直升机航拍及人工实地巡检三种方式对松材线虫病树进行排查。卫星遥感方式可实现广域林区覆盖,但受影像分辨率、更新周期等制约,难以满足实际生产需要。直升机航拍方式可实时获取林区影像,为疫情的快速诊断提供有效支撑,但存在飞行成本高、审批过程复杂等问题。而人工实地踏查方式需要林业人员深入林区排查松材线虫病树,时间、人力成本过高。为此,急需一种低成本、快速的松材线虫病树排查手段。近年来,无人机作为兼顾便携性和灵活性的低空图像采集平台,可挂载各类相机获取大范围、高分辨率图像,执行多种低空监测任务[1-3]。Lehmann等[4]利用无人机多光谱图像和基于对象的图像处理方法来监测橡树的虫害。Yu等[5]利用无人机多光谱进行大豆产量预测以及成熟期识别研究。史洁青等[6]以无人机航拍影像为数据基础,结合多种技术构建了森林资源调查系统,满足森林资源信息化管理的需要。无人机机载设备丰富,监测森林资源快速便捷、数据分辨率高、影像细节丰富[7-9]。因此,无人机成为快速获取松材线虫病树不同时空分辨率影像的有效方式。
利用机器学习来分析不同时期染病枯树的光谱数据特征,成为实现有效监测森林病虫害的常用手段[10][11]。汪红等[12]使用便携设备采集切梢小蠹病害松树的光谱反射率,依据光谱特征建立高光谱特征模型,预测准确率达80%以上。刘金沧等[13]设计了基于多特征条件随机场(Conditional Random Field, CRF)的无人机影像松材线虫病监测方法,对变色松树平均分类精度达88.43%。胡根生[14]等将卷积神经网络与Adaboost算法相结合来识别无人机拍摄的松材线虫病害松树,识别精度达94.4%。近年来,基于深度学习的目标检测算法因其速度快、准确度高的特点而逐渐广泛应用于森林监测领域[15],如R-CNN系列、YOLO系列及SSD[16]等目标检测算法。Faster R-CNN[17]作为经典的“two-stage”方法,主要包括两个模块:区域推荐网络(Region Proposal Network, RPN)和Fast R-CNN检测器。RPN负责产生候选区域,与特征图一起输入到Fast R-CNN检测器中进行分类与边框回归计算。在MS COCO[18]数据集上的传输帧数最高可达到6帧每秒,mAP达到59.1%。与Faster R-CNN不同,SSD300和YOLOv3则是“one-stage”的代表方法,把一个神经网络应用到整张图像,将图像划分为多个区域,并预测每个区域的边界框和概率。在MS COCO数据集上,YOLOv3的传输帧数达到45帧每秒,mAP达到了51.5%。徐信罗等[19]将Faster R-CNN目标检测算法用作染病变色松树的自动识别,识别总体精度达到82.42%。孙钰等[20]将无人机航片与改进SSD300算法相结合来识别红脂大小蠹危害的松树,平均查准率达到97.22%。张瑞瑞等[21]使用无人机航拍获取染病松树样本数据,结合深度学习分割网络U-Net开展染病松材变色木图像分割研究,训练后得到较高的训练精度和验证精度。然而,由于松材线虫病害窗口期短、传统检测模型训练耗时长,缩短模型训练时间、提升检测精度是松材线虫病害检测中亟待解决的问题。
本文将根据YOLOv3在检测准确率和处理速度方面的优势,重点研究基于YOLOv3的松材线虫病树监测方法。针对传统YOLOv3存在训练过程重叠率(Intersection over Union, IoU)的值置空以及Loss下降缓慢等问题,提出了一种基于CIoU改进的YOLOv3松材线虫病树检测方法,以提升检测精度,缩短模型的训练时间,降低了监测系统的复杂度和使用成本、增强其易用性。
1 研究区域概况
本文研究区域位于山东省泰安市泰山山麓西侧的转山子山(117.07378°~117.08039E,36.21288°~36.21307°N),如图1所示。研究区域面积为0.275 km2,最高海拔376.2 m。在2019年春季的林区普查中,发现转山子山区域松材线虫病疫情开始小范围扩散。

图 1 研究区域
2 材料与方法
2.1 检测流程
本文检测流程如图2所示。首先选用无人机平台搭载RGB高分镜头采集松材线虫病树图片,经标定后构建为Pascal VOC数据集;随后输入到目标检测算法中对模型进行迭代训练;然后将测试集输入到训练好的检测模型中进行预测并返回松材线虫病树边界框;最后根据评估指标测试检测模型的性能。

图 2 整体流程
2.2 图像采集
2.2.1 图像采集

图3 无人机
本文所采用的松材线虫病树图像于2019年8月采集,由大疆“御” MAVIC 2和大疆M600无人机执行航拍任务,无人机如图3所示,飞行参数如表1所示。大疆“御”MAVIC 2无人机机动性强,体积小,适合在林区小范围内抵近拍摄,搭载DJI FC220相机分别以相对树冠高度10 m、30 m和50 m进行俯拍。大疆M 600无人机体积大,具有飞行距离远、飞行高度高、滞空时间长等特性,搭载装配了云台的FireFly6S相机执行横向往复覆盖扫描拍摄整个区域的任务,其飞行轨迹如图4所示。两台无人机所拍摄的JPEG图像分辨率均为4 K,且包含该图片的地理位置信息以及无人机的飞行数据。所拍摄的部分松材线虫病树如图5所示。

表 1 无人机及机载相机参数

图4 大疆M600飞行轨迹

图5 两无人机采集到的松材线虫病树图像

图6 标注后的松材线虫病树图像
2.2.2 数据集构建无人机所采集的松材线虫病树图像共3672张,经鉴定最终选定836张病树图片制作Pascal VOC数据集,利用LabelImg软件标注松材线虫病树图像,标定的矩形框内包含松材线虫病树及其类别,部分标定结果如图6所示。标定完成后,按训练集:测试集为9:1的比例进行随机分配,最终将752张图片分为训练集,84张图片分为测试集。
3 检测方法
3.1 YOLOv3目标检测方法
YOLO系列算法是“one-stage”目标检测算法的代表,在多种应用场景下均表现良好。YOLOv3算法框架如图7所示。YOLOv3框架使用Darknet-53作为基础体征提取网络,通过引入与深度残差网络类似的残差单元使网络更深,减少计算过程中的浮点数,在更好获取目标特征的同时兼顾速度优势。在检测精度相似时其处理速度是ResNet-152网络的两倍[15]。借鉴SSD框架,对每一张输入的图像在长宽尺寸上分别进行下采样,输出三种尺寸的网格,获得不同深度的特征图,进一步采用特征金字塔网络结构来提高多尺度检测精度。将SoftMax分类器替换为一个1×1的卷积层和Logistic激活函数的网络结构,解决了多重标签分类问题。经过诸多借鉴与改进使得YOLOv3目标检测算法不擅长检测小物体的缺点得到改善。
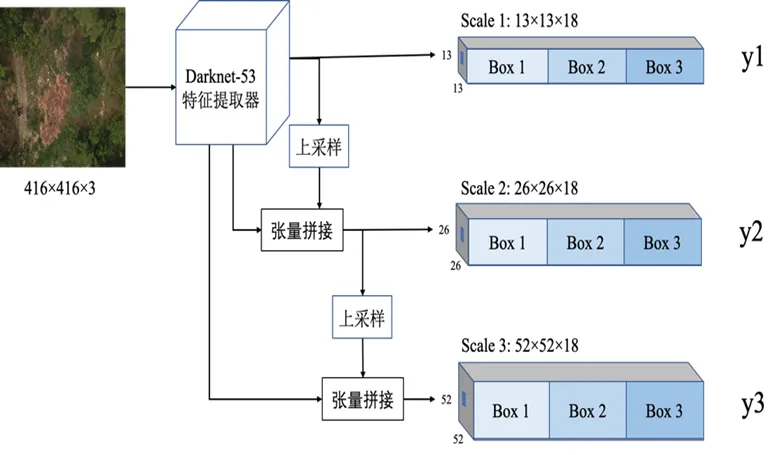
图7 YOLOv3检测框架
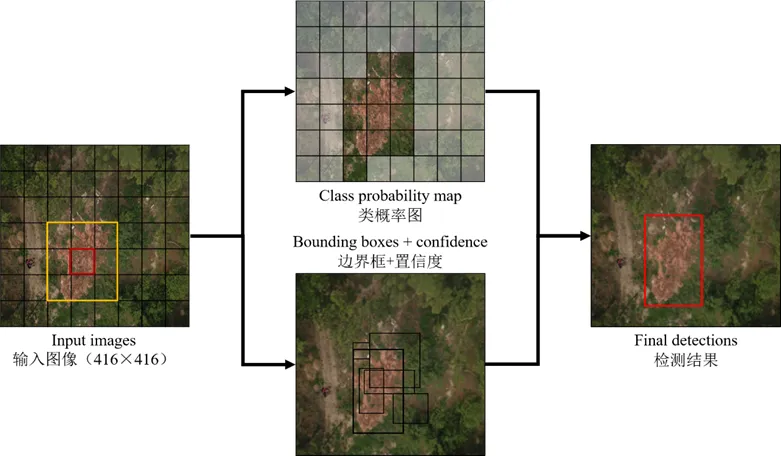
图8 YOLOv3的训练及检测过程
YOLOv3的损失函数通常由三部分组成,分别是Bounding Box损失、置信度损失以及类别损失,定义为:


式(2)表示目标框左上角位置经过交叉熵运算所得到的损失,表示在i尺度的j预测框是否有目标,有目标为1,否则为0。

式(3)表示目标框宽高经均方误差运算得到的损失。
大小适合的预测框在模型训练时能更快速、更精准,YOLOv3算法在数据集中对所有边界框使用K-means方法分成9种,每三种对应一个比例,总共有3种比例。图像进入枯松图像调整到416×416大小,接着被分割为13×13、26×26和52×52的网格,进入到Darknet-53网络后进行32倍、16倍、8倍下采样,随后经过张量拼接操作得到三个分支,最终得到如图7所示的13×13×18、26×26×18、52×52×18三种大小的特征图。在图8所示的训练和检测过程中,黄色真实目标框的中心恰好落在了输入图像的某一个图中所示的红色网格中,这个网格就负责预测此物体的检测框,每个检测框经过逻辑回归得到一个客观得分用来表示该检测框包含一个目标的可能性,最终得到包含目标的边界框。
3.2 YOLOv3-CIoU松材线虫病树检测方法
YOLOv3的损失函数(1)中采用均方误差作为目标框位置回归损失函数,在进行目标边界框回归时对目标尺度敏感,对目标长宽做开方处理在一定程度上可降低尺度对预测准确性的影响。研究表明IoU不仅能反映预测检测框与真实检测框的检测效果,还具备尺度不变性[22],所以使用IoU作为目标框位置回归损失函数相较于均方误差损失函数和交叉熵损失函数性能进一步提升。IOU的定义为:
1) 当检测框与真实目标框没有重合部分时,不存在梯度,无法进行梯度下降优化。如图9所示,a图和b图中重叠率都为0,但a图的预测效果优于b图。

图9 两种IoU为0的情况
2)在重叠率相同时,IoU损失并不能反应两个框如何重叠,不能说明检测框的定位效果相同,如图10所示。

图 10 三种面积相同的重叠区域
为此,Rezatofighi等[23]提出广义重叠率损失函数(Generalized IOU,GIOU)的概念,定义为:

其中C表示最小闭合凸面,如图11所示。当两个矩形框不重合时,依然可以为边界回归提供方向,GIoU在一定程度上弥补了IoU损失函数的缺陷。
如图12所示,当预测框被真实目标框重合时,最小闭合凸面就是真实目标框,此时GIoU降级成IoU,导致GIoU失效。为此,DIoU(Distance-IoU, DIoU)采用距离优化方式解决以目标框和真实框重合时GIoU失效的问题[24]。

式(6)所示的距离重叠率损失函数。

图 12 预测框被真实目标框包围
本文为进一步弥补缺陷加快模型训练速度,采用兼容重叠率损失函数(Compatible-IoU, CIoU)优化YOLOv3的训练过程。

图 13 检测框中心点距离d和重叠面积对角线距离c
如图13所示,CIoU边界框回归损失函数直接最小化预测框与真实目标框之间的归一化距离,解决了IoU损失值为零的情况,兼顾检测框的重叠面积以及检测框中心点的距离,同时增加检测框和真实目标框的长宽比一致性的衡量参数,使模型更倾向于向重叠区域密集的方向优化。CIoU损失值可计算为:



3.3 评估指标
设置四种指标来评价四种松材线虫病树检测模型的性能表现情况,分别为精确率(Precision)、召回率(Recall)、准确率(Accuracy)以及单张图像处理速度。前三种指标的定义分别为:




表2 真阳性、假阳性、假阴性和真阳性
4 结果与分析
4.1 模型训练与部署
为验证有效性,本文基于开源深度学习框架TensorFlow来验证所提YOLOv3-CIoU松材线虫病树检测方法的性能,并与YOLOv3、Faster R-CNN以及SSD方法进行对比试验。GPU节点和用于测试模型的移动工作站软硬件配置如表3。

表3 GPU节点和移动工作站软硬件详情
训练阶段采用数据扩充手段增加训练样本数量,使用Adam优化器,设置初始学习率为0.001,以16张图像为一个批次,每个模型共迭代10000次,平均损失下降到0.1以下。
4.1.1 平均损失曲线图14给出了YOLOv3和YOLOv3-CIoU检测方法训练过程中的损失值与迭代次数之间的关系曲线。训练日志表明YOLOv3-CIoU松材线虫病树检测方法在训练期间损失值置空现象明显减少,该模型在平均损失下降速度上较YOLOv3算法进一步加快,收敛更加明显,说明经过改进,YOLOv3-CIoU松材线虫病树检测模型在训练速度上得到提升。模型训练完成后,使用移动工作站进行模型性能测试。
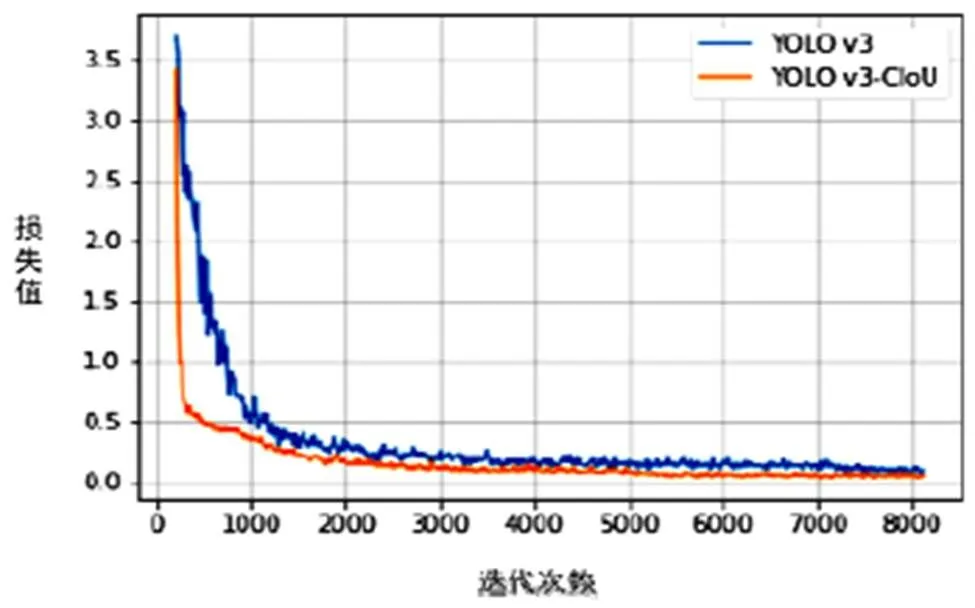
图14 平均损失曲线
4.2 模型性能分析
4.2.1 性能对比测试完成后,检测结果及性能指标如表4所示。减少误报和漏报目标是松材线虫病树检测模型的重要性能指标。从整体检测准确率来看,YOLOv3-CIoU检测模型性能较好,SSD300次之,而Faster R-CNN误报目标为20个,误报数过多,实际场景应用效果不理想。从平均单张图像处理时间来看,在移动终端上YOLOv3的处理速度与SSD300基本持平,均优于Faster R-CNN模型。因此,基于YOLOv3的松材线虫病树检测模型较符合快速、准确检测的防疫需求。

表4 检测性能
4.2.2 P-R曲线在评价目标检测模型的性能指标中,Recall和Precision分别表示召回率和精确率,而精确率和召回率是一对矛盾的度量,一般来说,精确率高时,召回率往往偏低;而召回率高时,精确率往往偏低。YOLOv3和YOLOv3-CIoU在松材线虫病树检测工作中的P-R曲线如图15所示。

图15 P-R曲线
如表4所示YOLOv3-CIoU目标检测模型在精确率和召回率方面都明显比未改进的YOLOv3算法性能优异,在兼顾召回率的同时,准确率也达到了98.88%,较YOLOv3提升5.33%,单张图像平均处理时间为0.32 s,也比YOLOv3减少了13%。
4.3 模型检测效果
模型测试过程中所用的松材线虫病树图像均为没有经过正射校正处理,存在镜头畸变、光晕等多种影响的原始困难样本图像。图16为困难样本图像的检测结果。
基础特征提取网络和先验框尺寸是影响模型检测精度和检测速度的重要因素。由表4所示的模型检测性能和图16困难样本图像检测效果可知,YOLOv3-CIoU采用基于深度可分离卷积网络的DarkNet-53特征提取网络,相比于基于VGG16的Faster R-CNN目标检测框架,单张图像处理时间减少约7 s,且模型检测精度大幅提升。
在SSD目标检测框架的训练过程中,先验框的最小尺寸、最大尺寸以及比例都需要手动输入,特征网络中先验框的大小和形状不能直接通过自学习获取,每一层特征使用的大小和形状都不相同,调试过程非常依赖经验。而YOLOv3检测框架仅使用K-means聚类方法就可以获得大部分先验框的形状,所以YOLOv3、YOLOv3-CIoU检测模型的检测精度高于SSD检测模型;此外,SSD使用conv4_3低级特征卷积层去检测小目标,但是conv4_3的特征卷积层数少,特征提取不充分,所以SSD算法对小株松材线虫病树检测性能不佳,整体性能表现不及YOLOv3检测模型。基础特征提取网络的改变对模型检测速度有较大提升,合适的先验框尺寸对提高模型检测精度具有重要意义。
图16(c)为YOLOv3松材线虫病树检测模型的检测结果,图16(d)为YOLOv3-CIoU松材线虫病树检测模型的检测结果。在测试程序运行过程中,相同的测试数据集中YOLOv3-CIoU处理速度加快,而且从图中可以明显观察到YOLOv3-CIoU的检测框相较于YOLOv3更加贴合松材线虫病树的边缘。
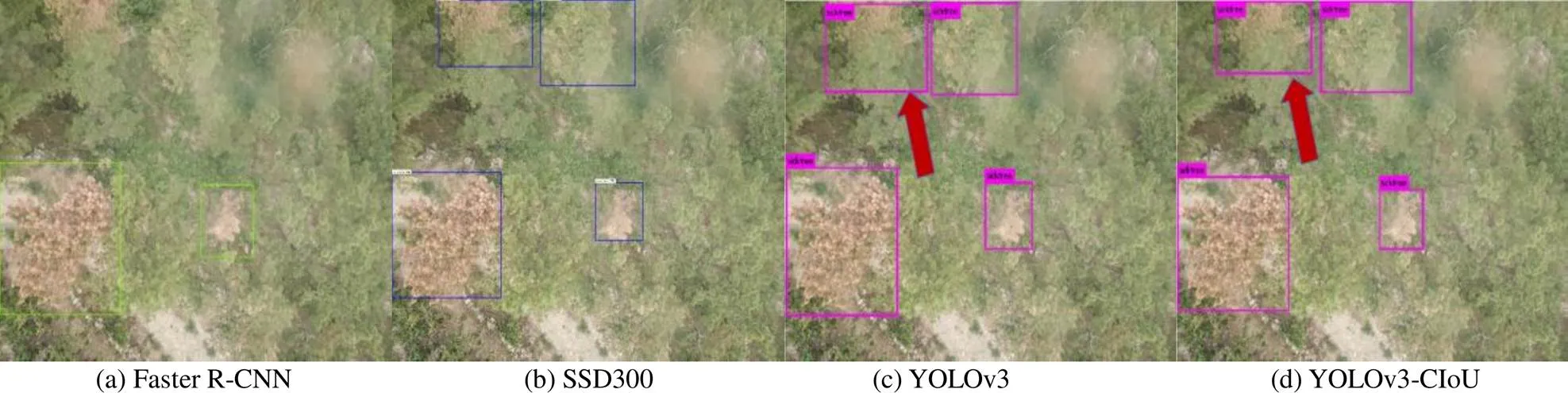
图16 a为Faster R-CNN检测结果,b为SSD300检测结果,c为YOLOv3检测结果,d为YOLOv3-CIoU检测结果
5 结论
传统的目标检测方法普遍存在过程繁琐、检测精度低的缺陷,本文研究的YOLOv3-CIoU松材线虫病树检测模型在森林防疫工作中有较好的性能表现。在测试集中其检测精度达到100%,误报和漏报目标数降到了较低的水平,而基于Faster R-CNN的标检测模型无法在较少的迭代次数下训练出的模型无法达到最优的检测结果,在检测精度方面低于YOLOv3-CIoU,平均单张图像处理时间分别为10.61s,需要的时间更多,无法满足泰山森林防疫的监测需求;相比于YOLOv3松材线虫病树检测模型,YOLOv3-CIoU平均单张图像处理时间为0.32s,较改进前提升13%,整体的准确率达到98.88%,较改进前提高5%以上。因此YOLOv3-CIoU松材线虫病树检测算法更具优势。
本文提出基于无人机和深度学习的林区松材线虫病树检测方法,运用多种算法框架针对泰山林区松材线虫病树数据集展开研究。经实验证明,所研究的YOLOv3-CIoU松材线虫病树检测算法在训练过程和模型检测过程中表现最佳,为实现无人机精准、快速监测松材线虫病树、控制松材线虫病疫情提供了支撑。
*致谢:感谢山东农业大学高性能计算中心提供计算资源与技术支持。
[1]张军国,闫浩,胡春鹤,等.无人机在林业中的应用及前景展望[J].林业工程学报,2019,4(1):8-16
[2]杨全月,董泽宇,马振宇,等.基于SfM的针叶林无人机影像树冠分割算法[J].农业机械学报,2020,51(6):181-190
[3]苏迪,高心丹.基于无人机航测数据的森林郁闭度和蓄积量估测[J].林业工程学报,2020,5(1):156-163
[4]Lehmann JRK, Nieberding F, Prinz T,. Analysis of Unmanned Aerial System-Based CIR Images inForestry-A New Perspective to Monitor Pest Infestation Levels [J]. Forests, 2015,6(3):594-612
[5]Yu N, Li L, Schmitz N,. Development of Methods to Improve Soybean Yield Estimation and Predict Plant Maturity with An Unmanned Aerial Vehicle Based Platform [J]. Remote Sensing of Environment, 2016,187:91-101
[6]史洁青,冯仲科,刘金成.基于无人机遥感影像的高精度森林资源调查系统设计与试验.农业工程学报,2017,33(11):82-90
[7]Windrim L, Bryson M. Forest Tree Detection and Segmentation Using High Resolution Airborne Lidar//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019:3898-3904
[8]Aknc A, Gktoan AH. Detection and Mapping of Pine Processionary Moth Nests in UAV Imagery of Pine Forests Using Semantic Segmentation//Australasian Conference on Robotics and Automation (ACRA), 2019
[9]Zheng Z, Wang P, Liu W,. Distance-iou Loss:Faster and Better Learning for Bounding Box Regression.Proceedings of the AAAI Conference on Artificial Intelligence,2020,34(7):12993–13000
[10]张素兰,覃菊,唐晓东,等.松材线虫危害下马尾松光谱特征与估测模型研究[J].光谱学与光谱分析,2019,39(3):865-872
[11]许等平,任怡,闫哲,等.基于CNN的无人机遥感影像质量评价[J]林业工程学报,2018,3(5):121-127
[12]汪红,石雷,马云强,等.云南切梢小蠹危害云南松监测模型与判定规则[J].林业科学研究,2018,31(4):53-60
[13]刘金沧,王成波,常原飞.基于多特征CRF的无人机影像松材线虫病监测方法[J].测绘通报,2019(7):78-82
[14]胡根生,殷存军,张艳,等.融合卷积神经网络与Adaboost算法的病害松树识别[J].安徽大学学报:自然科学版,2019,43(2):44-53
[15]陶欢,李存军,程成,等.松材线虫病变色松树遥感监测研究进展[J].林业科学研究,2020,33(3):172-183
[16]Liu W, Anguelov D, Erhan D,. SSD: Single Shot Multibox Detector[C]//European conference on computer vision. Cham: Springer, 2016:21-37
[17]Ren S, He K, Girshick R,. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017,39(6):1137-1149
[18]Lin T Y, Maire M, Belongie S,. Microsoft COCO: Common Objects in Context [C]. Fleet D, Pajdla T, Schiele B,. Computer Vision –ECCV 2014//Lecture Notes in Computer Science, Cham: Springer, 2014
[19]徐信罗,陶欢,李存军,等.基于Faster R-CNN的松材线虫病受害木识别与定位[J].农业机械学报,2020,51(7):228-236
[20]孙钰,周焱,袁明帅,等.基于深度学习的森林虫害无人机实时监测方法[J].农业工程学报,2018,34(21):74-81
[21]张瑞瑞,夏浪,陈立平,等.基于U-NET网络和无人机影像的松材线虫病变色木识别[J].农业机械学报,2020,36(12):61-68
[22]Redmon J, Farhadi A. Yolov3: An Incremental Improvement. [EB/OL]. [2018-04-08]. https://arxiv.org/pdf/1804.02767.
[23]Rezatofighi H, Tsoi N, Gwak J,. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR):658-666.
[24]Zheng ZH, Wang P, Liu W,. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression [C]//AAAIConference on Artificial Intelligence, 2020
Study on the Detection Method for Pinewood Wilt Disease Tree Based on YOLOv3-CIoU
LI Feng-di1, SHEN Wei-xing2, WU Jie-fang3, SUN Feng-gang1, XU Li2,LIU Zhen-yu4, LAN Peng1*
1.271018,2.271000,3.271000,4.271018,
Pinewood wilt disease is called as pine cancer, and the timely discovery and disposal of affected pine trees are critical to the containment of the spread of the disease. Traditional monitoring methods such as manual survey and satellite remote sensing can hardly satisfy the requirements of disease surveillance in complex forest environments. This paper proposed an improved YOLOv3 based identification method of pinewood wilt disease, which can spot the affected trees in a quick and accurate manner and enhance the disposal efficiency. First, the images of sick trees were collected with mini-UAV-borne high-resolution digital cameras from different spatial positions, and the Pascal VOC data sets were built. Next, to address the problems in the YOLOv3 training step such as IoU set null and slow decline of the average loss, the paper provided an improved YOLOv3-CIoU method such that the algorithm will have high accuracy with fast training and small data volume. Lastly, the improved YOLOv3-CIoU model, Faster R-CNN and SSD as well as other models were trained and tested on a high-performance computer.The results showed that the accuracy rate of the improved YOLOv3-CIoU model to detect the affected trees was 98.88%, more than 5% higher than that of the original YOLOv3 algorithm; the average single-picture detection rate on low-configuration mobile terminals was only 0.32s, 13% shorter than before. Compared with other models such as Faster R-CNN and SSD, the improved algorithm showed better performance in terms of detection accuracy, model training time and accuracy of target edge framing. Therefore, the improved YOLOv3-CIoU detection model of trees affected with pinewood wilt disease shows superior performance in various evaluation indicators, consequently it can effectively enhance the detection efficiency, reduce the monitoring costs, and guarantee accurate and efficient disease surveillance in practice.
Pinewood wilt disease tree; YOLOv3-CIOU; target detection
S431
A
1000-2324(2021)02-0224-010
10.3969/j.issn.1000-2324.2021.02.012
2020-09-20
2020-11-14
山东省农业科技资金(林业科技创新)项目(2019LY003);山东省重点研发计划项目(2019GNC106106);山东省重大科技创新工程项目(2019JZZY010706);山东省自然科学基金(ZR2019MF026)
李凤迪(1996-),男,硕士研究生,研究方向为深度学习、目标检测. E-mail:leefandy@126.com
Author for correspondence.E-mail:lanpeng@sdau.edu.cn
