基于系统总耗时最小的双目标泊位分配模型
2021-05-26杨晓芳江林成
杨晓芳,江林成
(上海理工大学 管理学院,上海 200093)
据公安部统计,截至2019年底,全国的私家车(私人小微型载客汽车)保有量达到2.07亿辆,近5年年均增长1 966万辆。小汽车的迅速普及在给人们带来便利的同时也引发了诸如交通堵塞和停车难等一系列的问题。特别是当停车者对目的地附近停车场的停车信息一无所知时,通常会采用传统的巡泊方式寻找停车位,这将花费停车者大量的时间。而商圈、办公楼、医院等附近一般会建有大型的公共停车场,这些大型停车场的占地面积大、停车泊位多,且多数是地下停车库。地下停车库的空间密闭、具有辨识度的参照物少,易使停车者迷失方向,不仅增加了巡泊的难度,而且还使停车者的心情烦躁,停车的舒适度不佳。因此,如何给停车者分配停车泊位并进行诱导,是当前研究的热点之一。
对于停车诱导,国内外学者已有了一定的研究成果。目前,多数研究是针对场外诱导,杨晓芳等[1]以诱导区域范围内系统总耗时最小和停车场空满程度相近为目标,建立了双层目标模型。Chaniotakis等[2]分析了驾驶员在不同地点的选择行为,研究了个体偏好对泊位选择的影响。段满珍等[3]定义了个性化诱导,并以总步行距离最短和泊位均衡利用为目标,建立了基于个性化诱导的停车场诱导模型。卢凯等[4]对停车者进行了心理意愿分析,并确定了区域诱导范围,提出了以停车总成本最低为目标的停车位动态分配和诱导模型。国内对停车场内诱导系统的研究主要集中在技术方面[5]。李博等[6]基于物联网技术构建了场内停车诱导系统,运用ALT算法对车位路径进行规划,并通过大数据对用户进行聚类分析,以提供个性化服务。部分学者对已有算法进行改进,以节省时间。许增昭等[7]基于停车路径最短,将目标停车位加入最短树作为算法终止条件,对Dijkstra算法进行改进,有效地减少了计算量和计算时间。李伟等[8]将停车场划分成不同的小区,以行驶时间和停车难易程度为影响因素,使用启发式A*搜索算法来寻找最优泊位。袁琳等[9]考虑了路段上的车辆数对行驶时间的影响,采用节点分层的方式,对传统的Dijkstra算法进行改进,提高了算法的计算速度。
在诱导方法方面,多数是利用多属性决策、非集聚模型等来进行泊位选择。季彦婕等[5]详细对比了有无停车诱导下的停车行为,以步行距离、行驶距离、安全性、遮荫时长和有效泊位两侧车辆占用情况为影响因素,建立多属性决策模型,依据均衡接近度来选择最优泊位。Leephakpreeda[10]对停车位的特征进行主观量化并进行了模糊定义,提出了基于模糊决策的停车诱导策略。梁伟等[11]对城市居民在购物时泊位选择的行为及特征进行了定量分析,基于多项Logit模型分析停车者的个体偏好对泊位选择的影响,构建出基于个体偏好的泊位优选模型。林小围等[12]将合作博弈理论运用到停车诱导领域,通过建立合作机制,利用后到车辆支付费用来弥补先到车辆的时间损失,以达到降低系统总时间成本的目的。刘建明等[13]考虑用户与系统之间的相互关系,提出了基于Stackelberg的博弈模型,寻找用户接受度高且整体收益好的诱导策略。
从目前的研究来看,针对于停车场内多辆车同时诱导的研究不多,但是从实际情况分析,大型的停车场一般配建有多个出入口,存在多辆车在一较短时间段内进入停车场申请停车诱导的情况。因此,本文针对从不同入口同时进入停车场的车辆分配泊位问题,从停车场内停车总需求出发,以∆t时段内系统中待诱导车辆的总停车耗时最小为第一层目标,以∆t时段内系统中停车者单个耗时的方差最小为第二层目标,提出了一种双目标泊位分配模型。
1 基本假设
停车场内泊位分配模型在建立的过程中遵循以下假设:
a.假设停车场入口未设关卡,车辆可直接进入停车场;
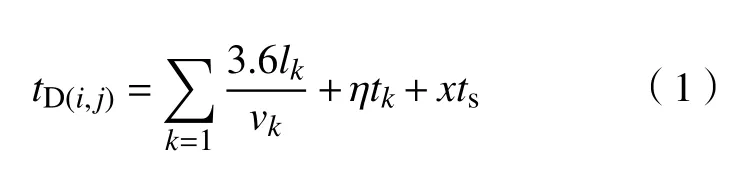
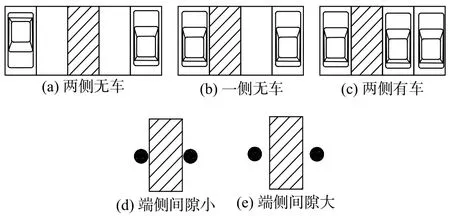
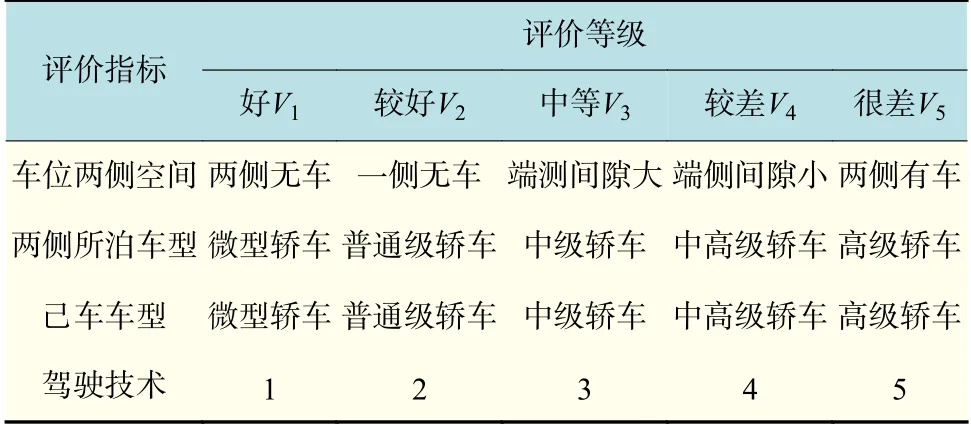
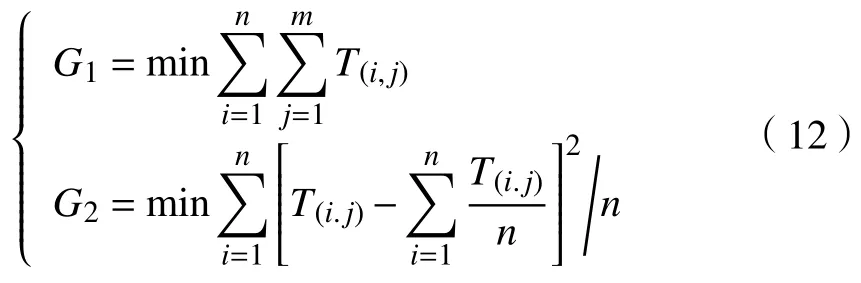
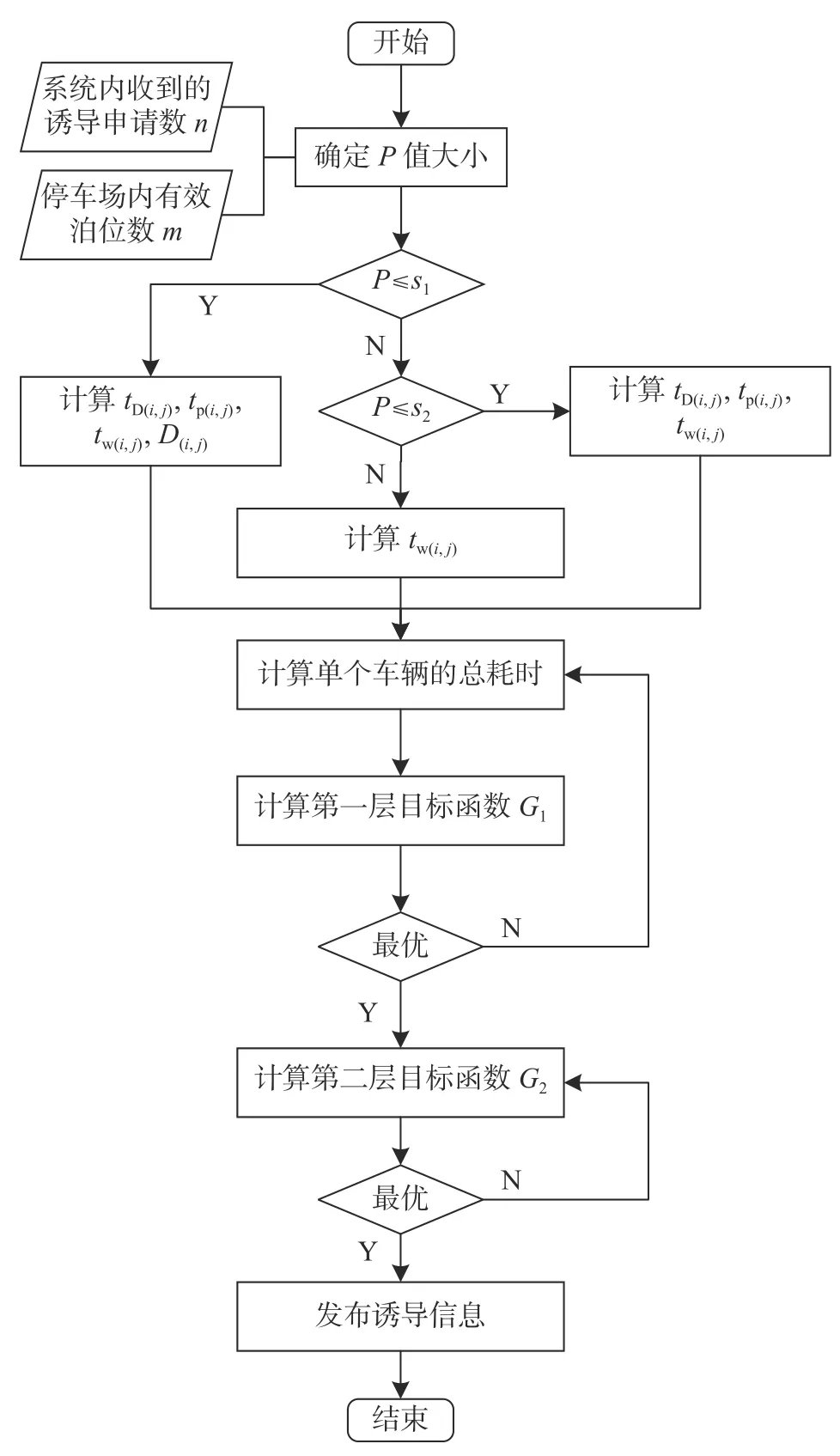
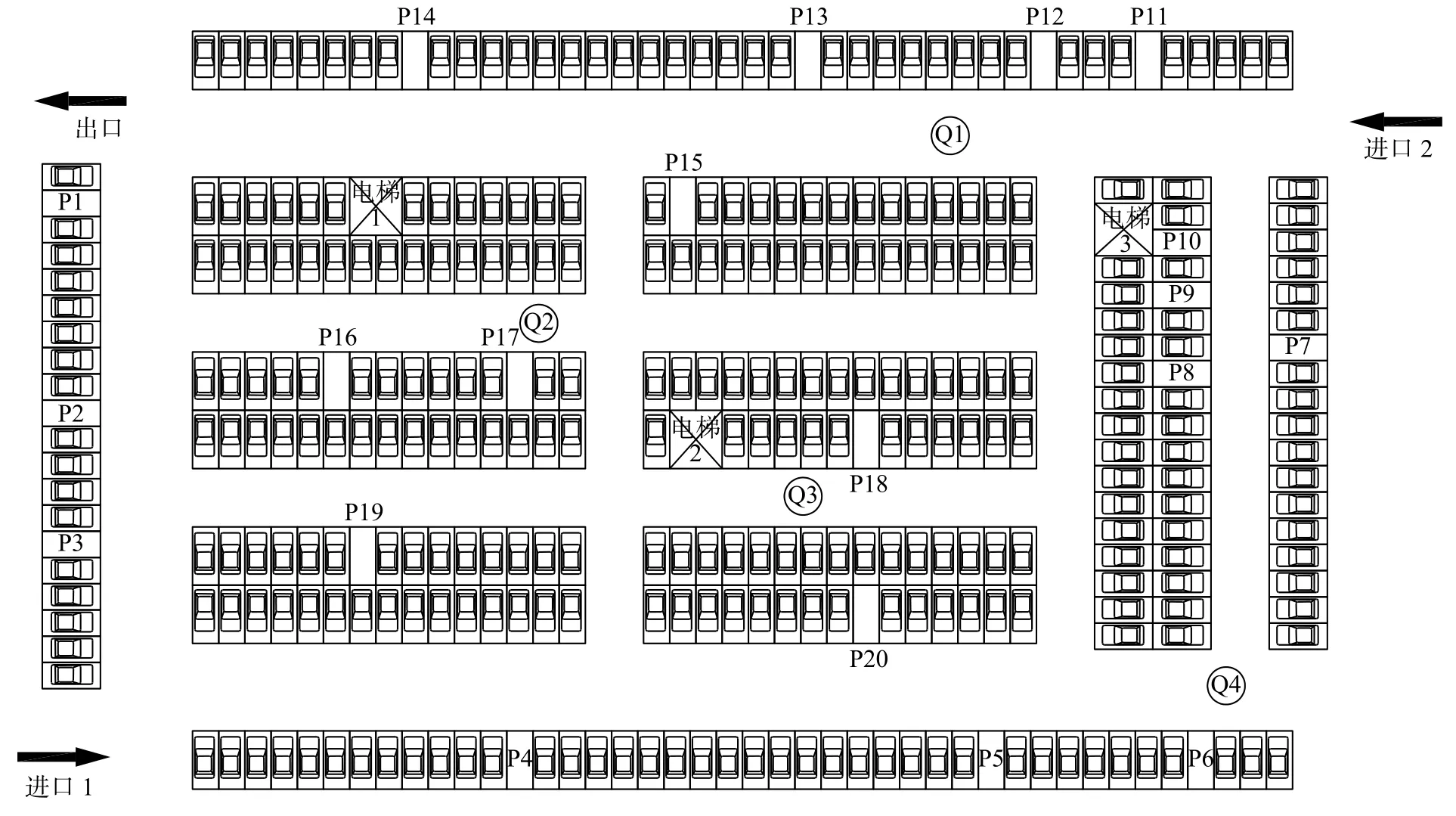
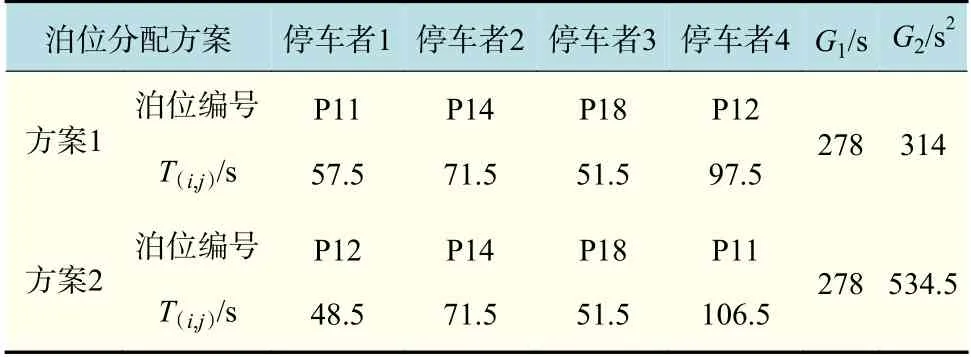
b.假设停车场内同时有m个停车位和n个待泊车辆,且有效停车位的个数多于待泊车辆数,即n c.假设所有进入停车场内待泊车辆均按照停车诱导信息进入指定的停车泊位,已经被系统分配的泊位其他车辆不能进入停车; d.假设在一较短时间段(∆t)内进入的车辆同时申请停车诱导; e.定义停车场内待诱导车辆数n与有效泊位数m的比值为P。 构建泊位分配模型时应该充分考虑影响停车者选择泊位的主要因素,通过对前人的研究,总结出停车者在停车时主要考虑的因素有行驶时间、步行时间、停车入位时间、安全性、遮荫时长等。在商圈附近停车场多为地下停车场或立体式停车楼,所停车辆不受阳光的影响。随着技术的发展和停车诱导系统的构建,对泊位的监测越来越普及。如上海市杨浦区五角场商圈合生汇的停车场,该停车场为每个泊位配备了视频监测器,用于检测车位的占用情况和所停车辆的车牌号等信息。监测器的普及不仅为信息采集提供了便利,而且也使得车辆的安全得以保障。综合上述情况,再考虑停车者对所分配泊位的心理意愿大小,本文确定4种因素作为泊位分配的主要影响因素。 行程时间是指从停车场入口到有效泊位所用的时间,包括车辆的行驶时间,以及因受通道上有泊车行为发生等情况的影响而必须停车等待的时间。行程时间受行驶距离、行驶速度、预定轨迹上是否有泊车行为的发生等因素的影响。以路段平均行驶速度作为计算依据,则行程时间tD(i,j)为 式中:tD(i,j)为车辆i行驶至停车位j的行程时间;lk为第k号路段的长度;vk为第k号路段上的行驶速度,停车场内一般限速为5 km/h;tk为路段k中有泊车行为所增加的时间,,tj为前车正在或即将在路段k中泊位上泊车的用时,为前车到达该泊位和停车入位所用时间之和,为待泊车辆到达该泊位的行程时间;ts为单个弯道的附加效用时间;x为弯道个数;η为布尔变量,泊车行为对行程时间有影响取1,没有影响取0(若车辆到达该路段时前车还未完成泊车则判为有影响,若能在车辆到达前前车完成泊车则判为无影响)。 通过计算前车完成泊车所用时间和待泊车辆到达前车所泊车位的时间差,可以判别前车泊车行为是否对后车产生影响。 停车入位时间是指停车者将车辆停入到泊位所用的时间,从车辆到达泊位开始直到车辆完全停入泊位,所停车辆不再影响通道上的车辆通行,本文不考虑停车者及随行人员下车及下车后对通道上车辆的影响。停车入位时间受停车者的停车技术、有效泊位两侧的停车情况、停车者所驾驶的车型等因素的影响。而同一有效泊位两侧的停车情况随时间的变化而变化,根据对停车场的调查,可分为以下几种情况(见图1):a.两侧没有车辆停放;b.一侧没有车辆停放;c.两侧均有车辆停放;d.端侧间隙小;e.端侧间隙大。图中用斜线填充的长方形为目标车位,黑色填充的圆形为停车场的支柱(隔墙、隔离桩等固定设施)。 图1 有效泊位两侧空间情况Fig.1 Space situation on both sides of effective berth 本文采用模糊综合评判法对停车入位时间进行分析,具体步骤如下: a.确定因素集,停车入位时间与车位两侧的空间利用情况和所泊车型相关,可用空间越大,停车入位时间越短;与己车车型成正比,停车者所驾驶的车辆体积越大,停车入位时间越长;与驾驶技术成反比,驾驶技术越好,停车入位时间越短。这些因素构成评价指标体系集合。 式中:U1为车位两侧的空间利用情况;U2为车位两侧所泊车型;U3为己车车型;U4为车主的驾驶技术,越熟练停车时间越小,划分等级为1~5,1为最好。 其中,己车车型和车位两侧所泊车型可以利用视频识别技术识别车牌信息,通过车牌号码可以查询到车辆的车型,或是通过RFID技术,采集进入车辆的信息。目前随着智能行业的不断进步,智能停车APP和基于微信小程序等为停车者提供诱导服务的程序大量涌现[14-15],一般需要使用者注册登入,通过在使用者登入时对其询问可获得停车者的驾驶技术,每隔一固定时间段询问一次。 b.确定评语集。取评语集V={好V1,较好V2,中等V3,较差V4,很差V5}。对评语集V1—V5分别赋值1~5。各因素对应的评语如表1所示。 表1 评价指标及其评价等级Tab.1 Evaluation index and evaluation level c.确定各因素的权重。 d.确定模糊综合评判矩阵。 e.综合评判。通过对权重矩阵和综合评判矩阵的转置矩阵点乘之后可得到综合评判结果,将得到的结果通过停车时间转换系数转换成用时后赋值给tp(i,j)。 式中:tp(i,j)为停车入位的时间;α为停车时间转换系数。 步行时间是指停车者从有效泊位到达目的地所用的时间,包括有效泊位到停车场出口所用时间和停车场出口到目的地的所用时间,地下停车库等将电梯间视为停车场出口。由于停车场的环境复杂,特别是地下停车库,空间密闭,空气质量欠佳,所以在实际计算时,应该对停车场内的步行时间进行放大处理。除此之外等候电梯和乘坐电梯的时间不纳入考虑范围之内。 式中:tw(i,j)为车辆i驾驶员从停车位步行至目的地的步行时间;tw(j,e)为停车泊位j到停车场出口e的步行时间;tw(e,Qi)为停车场出口e到目的地Qi的步行 时间;ζ为放大系数,应大于1。 在停车场内,若到达车位需要转多个弯道时,停车者在该泊位停车的意愿远小于直行就能到达的泊位,且停车者的步行心理阻抗随着步行时间的增加而增加,对泊位的满意度随着停放便利性的增加而增加,即停车者更倾向于停放容易、下车便利的泊位。因此,本文选择上述3个因素来衡量停车者对泊位的满意度,用于计算停车者的心理意愿,定义停车者i前往停车位j进行停车的意愿计算公式为 式中:xmax为最大可接受的转弯个数;Twmax为最大可接受步行时间;β,γ为将意愿转换成时间的系数;θ(i,j)为停放便利性,是指停车者下车的方便程度。 对停车便利性进行定量化处理,可依据有效泊位两侧停车情况进行量化处理,将前文5种泊位两侧可用空间情况分别赋值:两侧没有车辆停放为1,一侧没有车辆停放为2,端侧间隙大为3,端侧间隙小为4,两侧均有车辆停放为5。值越小代表车辆两侧可用空间越大,下车越便利。定义隶属度:f(5)=1,f(3)=0.8,f(1)=0.1,用偏大型柯西隶属函数可表示为 式中:a,b,c,d均为待定常数;u为泊位两侧可用空间情况参考值。 泊位分配模型应该充分考虑停车诱导系统内各个申请泊位诱导的车辆,以及停车场内可利用的有效泊位数。当P值较小时,停车场内可供利用的泊位较多,在满足系统总用时最小的情况下可以兼顾停车者个体需求;随着P值的增大,可选择性随之降低,难以兼顾停车者的个体需求,因此需要针对不同的P值制定不同的泊位分配方法。 停车场内同时有m个停车位和n个待泊车辆,计算第i辆小汽车(1≤i≤n)选择停车位j(1≤j≤m)的停车时间为T(i,j),则 式中,s1和s2为划分停车场内空满程度等级的两个待定常数。当 0 为多个车辆分配泊位时,由于停车场内泊位分布的多样性,仅以系统内总耗时最小为目标的单目标函数可能存在有多个解的情况。因此,本文考虑各个停车者停车耗时的均衡性,建立一个双目标泊位分配模型,以保证模型为泊位分配输出唯一解。 以∆t时段内系统中所有车辆完成泊车行为的总耗时最小为第一层目标(G1),本文中的总耗时不仅仅只是计算停车者花费的实际时间,除停车者完成停车的一系列动作所需时间经过系数折算得到的时间外,将停车者对所停泊位的满意程度(停车者心理意愿)通过时间转换系数转换成时间后计入到停车总耗时之中。该目标不仅达到了系统最优的目的,还考虑了停车者对目标泊位的心理意愿,增加停车者对诱导系统的信任,有利于提高诱导系统中的诱导服从度。 以各车辆总耗时方差最小为第二层目标(G2),均衡∆t时段内系统中各车辆的耗时,避免出现个别车辆耗时过长的情况,从而减少因耗时过长停车者不服从系统诱导而对系统造成干扰的可能。 整个目标函数是从系统总用时最小的方案中选择出各车辆耗时较均衡的方案。 本模型需要先确定P值的大小,根据申请诱导车辆数和停车场内可利用泊位数比值的大小来选择不同泊位选择的影响因素;然后计算单个车辆的停车耗时,分别计算这些最优解的T值,得出使得系统总耗时最小的泊位分配方案;最后计算所有方案中各车辆停车总耗时的方差,比选出最优值。当停车场内有效泊位较少或待诱导的车辆较少时,可以采用遍历的方法求解,具体的模型求解流程如图2所示。当停车场内的有效泊位较多时,可采用遗传算法或其他智能算法求取最优解。 图2 模型求解流程图Fig. 2 Model solution flowchart 本文拟用图3所示的停车场为例,该停车场有2个进口道,1个出口道,有停车位338个,配备3个电梯间。针对有效泊位为20个进行泊位分配。诱导频率为10 s一次,步行时间放大系数ζ=1.5。 图3 停车场示意图Fig.3 Schematic diagram of parking lot 家用小汽车的长度在3800~4300 mm之间,本文中取4 m,车头间距为6 m,行驶速度为5 km/h≈1.4 m/s。计算可得,在10 s内每个进口最多可以有2辆小汽车进入停车场内,停车场设有2个进口,可得最多会有4辆小汽车同时申请停车诱导。现有申请停车诱导的车辆数4辆,其目的地分别为Q1—Q4(Q1和Q3从进口1进入,Q2和Q4从进口2进入),对其进行泊位分配。 当停车场内可用泊位数仅为20时,该停车场的停放饱和度为0.94,非常接近饱和状态,停车者难以选择符合其期望的泊位,符合模型的第三种情况,依据系统总步行时间最小为停车者分配泊位。分别计算4位停车者的目的地与各电梯间的距离以及各泊位到电梯间的距离,步行速度采用1 m/s,计算所用时间,对停车场内步行时间进行放大处理后可得到目的地到各泊位的所用总时间。以系统总用时最小为分配原则,得出分配方案,计算方案中单个车辆总耗时的方差,选择时间较均衡的方案。相关数据如表2所示。 表2 系统总耗时最小的分配方案对应的目标函数值Tab.2 Value of objective function corresponding to allocation plan with the minimum total system time consumption 通过算例分析,可以看出该模型在停车场利用率接近饱和的情况下仍能很好地为停车者分配合适的泊位,说明该模型能够较好地应用于不同利用率的情况。 从表2可以看出,若仅以系统总时间最小为优化目标,则同时存在相同的两组解,但是增设单个车辆耗时方差最小为第二层目标,可以求出唯一解。 针对大型停车场内多辆待泊车辆同时申请诱导的问题,考虑不同P值,选择不同的影响因素,建立以系统总时间最小和单个车辆总耗时方差最小为目标的双目标泊位分配模型。通过算例分析,本模型能够很好地适应于不同泊位利用率的情况,相比于传统的诱导模型更具灵活性。以单个车辆耗时方差最小为第二层目标不仅能求出唯一解,而且能避免系统产生单个停车者耗时过长的诱导方案,从而增加了停车者对诱导系统的信任度,减少停车者自主巡泊时对诱导系统产生的影响。2 泊位分配影响因素分析
2.1 行程时间

2.2 停车入位时间




2.3 步行时间

2.4 停车者意愿


3 泊位分配模型
3.1 单个车辆的停车总耗时

3.2 泊位分配模型构建
3.3 模型求解
4 算例分析
5 结束语