双目视觉测距系统软硬件设计研究∗
2021-05-25龚文超朱凤波
龚文超 朱凤波 刘 洁
(1.海军潜艇学院 青岛 266000)(2.91049部队 青岛 266102)
1 引言
随着计算机技术和光电技术的发展,机器视觉技术应运而生。在图像处理技术领域中,有一种采用CCD摄像机作为图像传感器采集数据的非接触式测量方法,这种方法具有精度高、速度快、成本低等诸多优点,在三维测量方面具有广泛的应用前景[1]。
双目测距技术运用两个摄像头对同一场景进行拍摄,从而产生图像视差,然后通过该视差建立物体距离测量模型,从而实现景物距离的实时计算[2]。
2 机器视觉应用与测量方法
随着计算机信号处理技术的不断发展,利用摄像机获取环境图像信息,从而实现对视觉信息的信息化处理成为了可能。计算机视觉观测技术能够使计算机具备环境信息认知的能力,从而完成人眼所不能胜任的工作,大大扩展了视觉信息处理的广度和深度。
以计算机视觉理论基础,重点研究如何感知环境中物体的形状、位置、姿态、运动要素即为机器视觉。
机器视觉的应用领域非常广泛,主要涉及工业自动化生产线应用、各类检验和监视应用、视觉导航应用、图像自动解释应用、人机交互应用、虚拟现实应用等多个领域和场合,并取得了很多实用的成果[3~6]。
在数字图像处理和计算机视觉理论研究的基础上,三维曲面非接触式测量技术获得了长足发展,并由此研究出了与众多领域相适应的测量方法,主要包括:1)激光干涉测量法。该方法是基于光波叠加原理,利用光的干涉原理对物理进行测量,在干涉场中产生亮暗交替的干涉条纹,通过分析处理干涉条纹来获取被测物体相关信息。2)激光扫描法。该方法是基于光学三角形,从激光光源向实物表面投射一亮点或直线条纹,从CCD相机中获得光束影像,根据光学三角关系计算反射点三维坐标来进行测量。3)双目立体视觉测量。该方法是基于视差原理,由多幅图像获取物体三维几何信息,然后通过视差原理恢复出物体三维几何信息,从而重建周围景物的三维形状与位置信息。4)结构光三维视觉测量。基于光学三角法测量原理,利用光源和成像系统之间的三角几何信息进行三维形面测量。
3 基于轴线平行结构的双目视觉测距原理
双目立体视觉测量方法是研究如何利用二维投影图像重构三维景物世界,运用两台不同位置的摄像机(CCD)拍摄同一场景,计算空间点在图像中的视差,从而获取该点三维空间坐标。
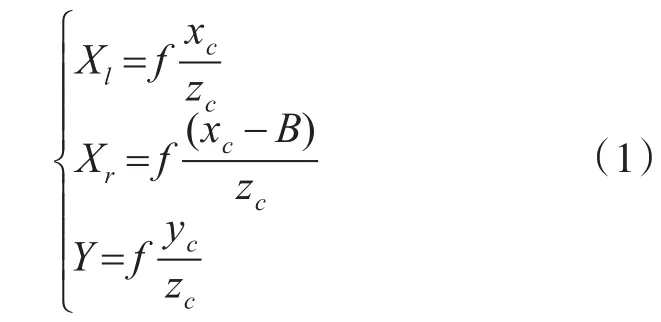
双目立体视觉是基于视差原理,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形,两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。图1为简单的平视双目立体成像原理图,两台摄像机的投影中心连线的距离,即基线距离B。两台摄像机在同一时刻聚焦到时空物体的同一特征点P,分别在“左眼”和“右眼”上获取了点P的图像,他们在左右图像上的成像点分别是pl和pr,将两台摄像机的图像放在同一平面上,则特征点P的图像坐标的“Y”坐标一定是相同的。由三角几何关系可以得到如下关系式[7-10]:
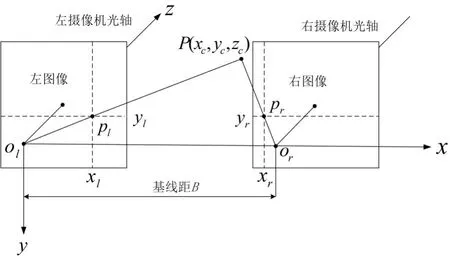
图1 轴线平行结构双目视觉测量原理
设视差为D=Xl-Xr。由此可计算出特征点P在摄像机坐标系下的三维坐标为
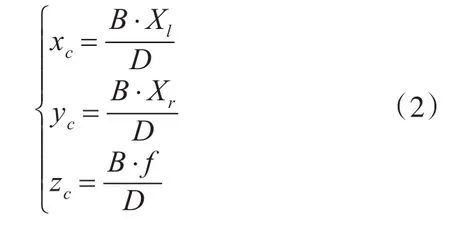
因此,通过计算被测目标在“左眼”、“右眼”中的像素视差值,然后由标定参数即可计算出该点的三维坐标。这种方法是点对点的运算,平面上所有点只要存储在相应的匹配点,就可以通过计算从而获取对应的三维坐标。
4 基于轴线汇聚结构的双目视觉测距原理
虽然轴线平行结构的双目视觉测距系统原理简单,计算方便,但该结构是理想的结构形式,实际应用中容易受到摄像机性能差异、安装工艺等各种因素的影响。通常情况下,双目视觉测距系统倾向于采用轴线汇聚结构[11~12]。
空间参考点P在已标定摄像机Cl和Cr上的像点分别为pl和pr,如图2所示。
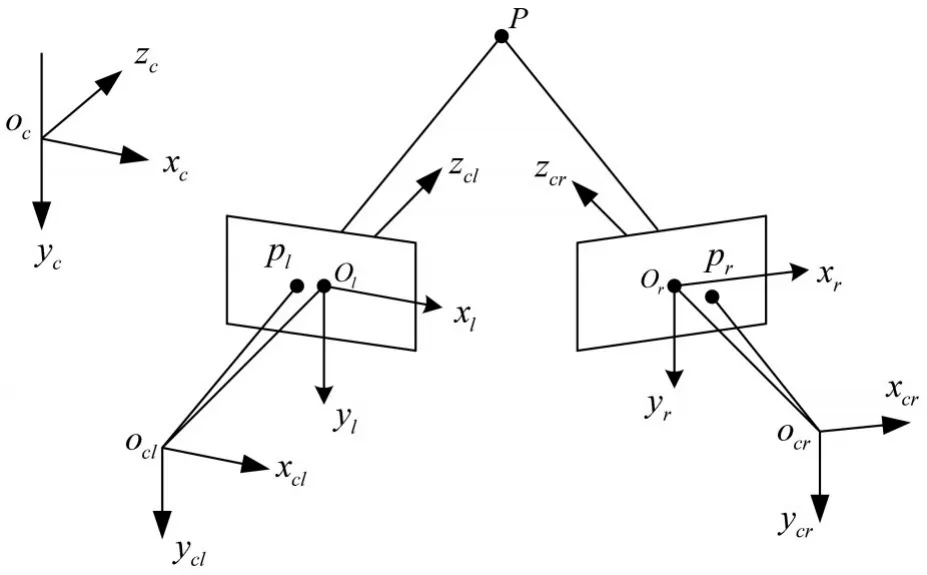
图2 轴线汇聚结构双目测距原理
其投影矩阵分别为M1和M2,由矩阵变换关系可得:
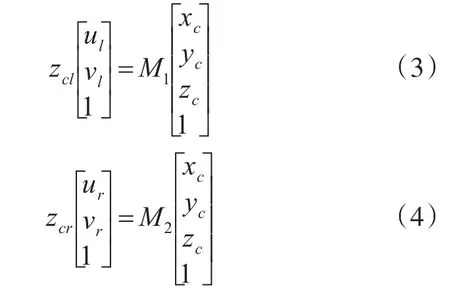
式中,(ul,vl,1)T为pl在图像坐标系下的齐次坐标;(ur,vr,1)T为pr在图像坐标系中的齐次坐标;(xc,yc,zc,1)T为点P在世界坐标系下的齐次坐标。
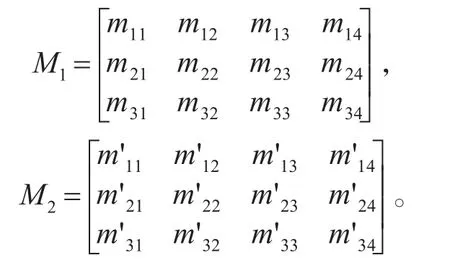
矩阵令M1、M2的表达形式为
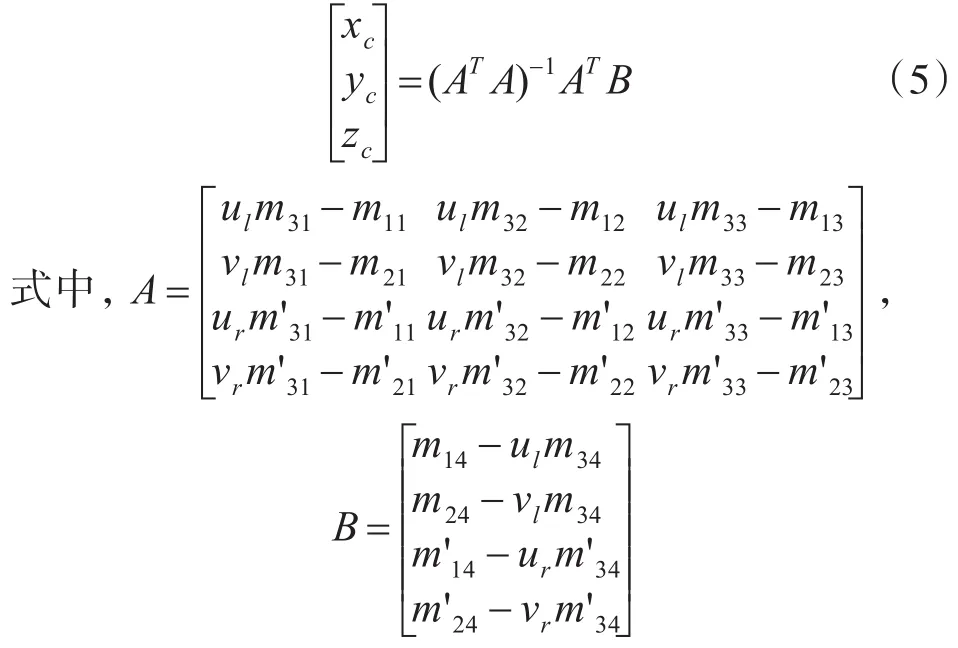
将M1、M2的表达形式代入式(3)、(4),采用最小二乘解算法得到空间坐标为
可得目标距离:

5 系统软硬件架构
在充分理解双目系统测距原理的基础来,设计系统软硬件架构。
5.1 硬件架构
双目测距系统硬件由CCD摄像机、图像采集卡、计算机系统以及显示设备构成。CCD摄像机的功能是获取目标图像信息;图像采集设备的功能是将图像信息转化为计算机数字信息;计算机系统的功能是处理图像数据,实现2D图像坐标到3D空间位置的恢复,最后输出和显示测量结果。系统硬件构成如图3所示。
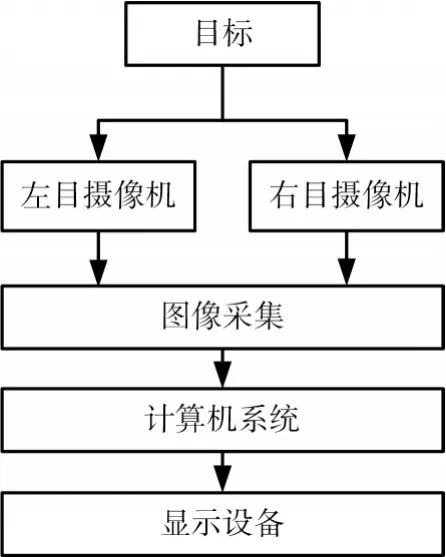
图3 双目测距系统硬件架构
5.2 软件架构
测量系统软件结构方案采用模块化,各软件功能模块及其相互关系如图4所示,软件架构主要由摄像机标定模块、图像采集与信息处理模块、数字图像特征检测与特征提取模块、数字图像特征立体匹配模块、目标距离测量模块以及数据输出模块等构成。
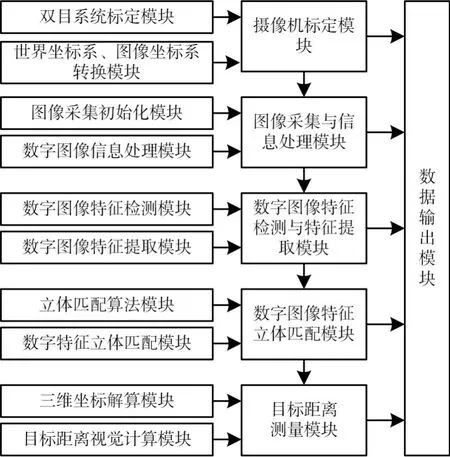
图4 软件系统模块结构图
摄像机标定模块负责系统标定以及坐标系转换;图像采集与信息处理模块负责实现图像采集初始化,并对图像信息进行数字化转换;数字图像特征检测与特征提取模块负责对图像特征进行精细检测与精确提取;数字图像特征立体匹配模块功能为实现数字特征立体匹配算法;目标距离测量模块功能为:在精确检测与提取特征信息的基础上,解算三维坐标,实现距离在线解算,并通过数据输出模块输出相应信息。
双目视觉测距系统开启工作时,首先通过镜头将被测量物体的光学图像成像在CCD图像传感器上;然后图像传感器将光信号转换为模拟电信号,并经数模转换器将模拟信号转换为数字信号;然后经过图像处理器对数字信息进行处理,并存储在存储器中;最后,通过数字接口或视频接口输入。
6 结语
本文从机器视觉的应用与测量方法着手,详细叙述了基于轴线平行结构和轴线汇聚结构的双目视觉测距原理,在此理论基础上,建立了双目视觉测距系统软件、硬件架构,并分别对软硬件架构功能模块进行了深入研究。论文的研究成果能够为后续双目视觉测距系统的工程实现和实际应用提供一定的基础。
