一种罗经高纬海区指向误差补偿方法∗
2021-05-25
(海军大连舰艇学院航海系 大连 116018)
1 引言
北极地区包括一片被浮冰所覆盖的海洋以及环绕周围的冻土地带,为亚洲、欧洲、北美洲三大地区所环抱,是空中和海上联系大西洋和太平洋及其周边地区的便捷通道[1]。在全球气候变暖的大背景下,北极地区气温上升明显,北冰洋封冻面积不断下降,俄罗斯北部的东北航道和加拿大北部的西北航道先后相继开通,将大大缩短地区间航程,促进世界经济和政治格局的调整[2]。此外,北极地区蕴含丰富的油气资源,具备重要的军事战略地位,多种因素促使北极地区成为目前世界主要大国争夺和未来争夺的一个重要的新焦点区域。
磁罗经、陀螺罗经等罗经系统是舰船航行的重要指向设备,其指向准确性将直接影响舰船操纵和安全。自2013年中远永盛轮首航北极东北航道开启商业通航以来,中远海运特种运输股份有限公司持续开展北极东北航道航行,积累了宝贵的航行经验,收集了北极高纬海区相关数据,本文基于中远祥云口轮北极东北航道航行数据,将各种罗经指向误差进行量化分析和补偿,为舰船高纬海区航行活动提供支持。
2 高纬海区罗经工作特性
舰船北极高纬海区航行能够使用的罗经指向设备主要包括磁罗经、陀螺罗经和GPS光纤罗经[3]。
2.1 磁罗经
磁罗经结构简单,依靠地球磁场引力作用来指示地理方位和航向,可不依赖外界条件独立进行工作,是舰船最早应用和必备的航海仪器之一。随着导航技术的发展,导航设备种类越来越多,操作使用也越来越方便,虽然磁罗经已经由原来在航行指向方面发挥主导作用降为辅助性设备,但由于磁罗经的自主指向能力可以作为远洋舰船最后的保障,仍被国际海事组织明确为必备导航仪器而要求远洋船舶安装使用[4]。
磁罗经的指北力为地磁场水平分力,随着纬度的升高地磁水平分力逐渐减小,尤其在两个磁极附近地区水平分力趋近于0,舰船在北极高纬海区航行时磁罗经指北力严重弱化,进而降低指北能力。地理北极与地磁北极的不重合产生磁差,在北极高纬海区尤其明显,东北航道维利基茨基海峡附近达到15°E~37°E,同时极区的地磁异常也会对磁罗经指北产生较大干扰,发生严重磁暴时磁罗经指向误差能达到几十度[5]。因此,有必要分析和掌握磁罗经在极区的变化情况进而有针对性地加以使用。
2.2 陀螺罗经
陀螺罗经利用地球自转角速度和重力场的综合效应,实现自主找北,相比于磁罗经,工作时不受地磁干扰影响,且指向精度更高,工作更稳定,可为舰船导航提供可靠的航向基准,因而被选为舰船导航指向的重要设备[6]。受限于工作原理,陀螺罗经的在北极高纬海区使用时指向准确性主要受到纬度误差和速度误差的影响。
陀螺罗经的纬度误差为

式中,αrφ为纬度误差,MD和M为陀螺罗经的机构参数。MD和M确定时,αrφ的大小与陀螺罗经工作的纬度有关,在极区高纬海区航行时,αrφ大小和变化率会显著增大。
陀螺罗经的速度误差为

式中,αrv为速度误差,其大小与航速成近似正比、与工作纬度的余弦成近似反比、与工作航向余弦成近似正比。在北极高纬海区工作时,αrv的大小和变化率均会增大。
陀螺罗经其他误差还包括冲击误差、基线误差和摇摆误差,在北极高纬海区工作时,由于工作纬度一般高于设计纬度,在机动过程中应关闭阻尼器以减小冲击误差对于罗经指北准确性的影响[7]。
2.3 GPS光纤罗经
光纤罗经是使用萨格奈克效应的新型光学陀螺的罗经,光纤陀螺自身无运动部件,具有良好的稳定性,对于加速度不敏感,检测灵敏度和分辨率极高,同时具有启动时间短、结构简单、可直接数字输出并与计算机接口联网等突出优点,使得光纤罗经得以广泛应用[8]。光纤罗经的指向精度主要受光纤陀螺标度因素稳定性、灵敏度指标、可敏感的速率、零偏和零偏稳定性以及温度瞬态、震动和偏振等因素的影响,具备北极高纬海区工作稳定指北的能力。
GPS罗经通常也叫卫星罗经,利用GPS导航定位数据解算出基线向量在大地坐标系中的值,进而得到舰船航向等信息,在工作时通过持续接收高精度的卫星定位指向数据进行修正,进而实现稳定指北的目的[9]。GPS光纤罗经很好地综合了GPS罗经和光纤罗经各自的优势,显著提高了工作时的指向精度,具备良好的全地域、全天候指向能力并能保证连续指向[10]。
3 舰船高纬海区罗经指向误差分析
测试比对数据采集使用中远自主研制的GPS光纤罗经,在纬度低于85°的区域,卫星信号有效时指向精度高于0.1°,卫星信号丢失的30min以内,指向精度不低于0.5°。数据样本集时间跨度20天,区域跨度由60°N~77.8°N近18个纬度范围,为保证数据的辨识度,针对按14节左右速度航行的测试数据采集船舶,选取采样间隔为1h左右。考虑到船舶卸货前后自身船铁磁性会发生变化,对卸货前后和同纬度罗经指向稳定性和指向误差分别进行分析。
3.1 指向稳定性分析
根据各自工作原理可知,磁罗经、电罗经和GPS光纤罗经指向稳定性影响因素各不相同,装载条件下罗经指向对比曲线如图1(a)所示,空载条件下指向曲线如图1(b)所示。在航经的北纬75°以下纬度区域,磁罗经、电罗经和GPS光纤罗经均具有良好的指向稳定性,同一纬度满载和空载情况下均能保持较好的指向稳定性。
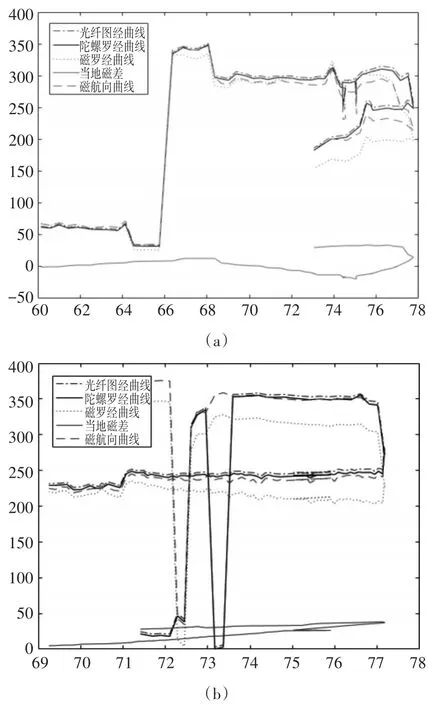
图1 三种罗经指向稳定性曲线
3.2 指向误差分析
根据工作原理,GPS光纤罗经指向精度在0.5°以内,按照国际惯例,为保证航行安全,电罗经启动和工作误差通常不超过1°,按照国际海事组织相关规定,海船磁罗经工作误差要求不能超过5°,可以选择GPS光纤罗经数据为指向准确性比对的基准,进而分析磁罗经和陀螺罗经指向误差[11]。装载条件下罗经指向误差分布如图2(a)所示,空载条件下罗经指向误差分布如图2(b)所示。陀螺罗经和GPS光纤罗经之间的误差变化比较稳定,且同纬度不同地点、不同时间和不同航向变化不大。磁罗经的误差随着纬度增高,逐渐趋于发散,且不同时间、不同地点误差变化较为明显。
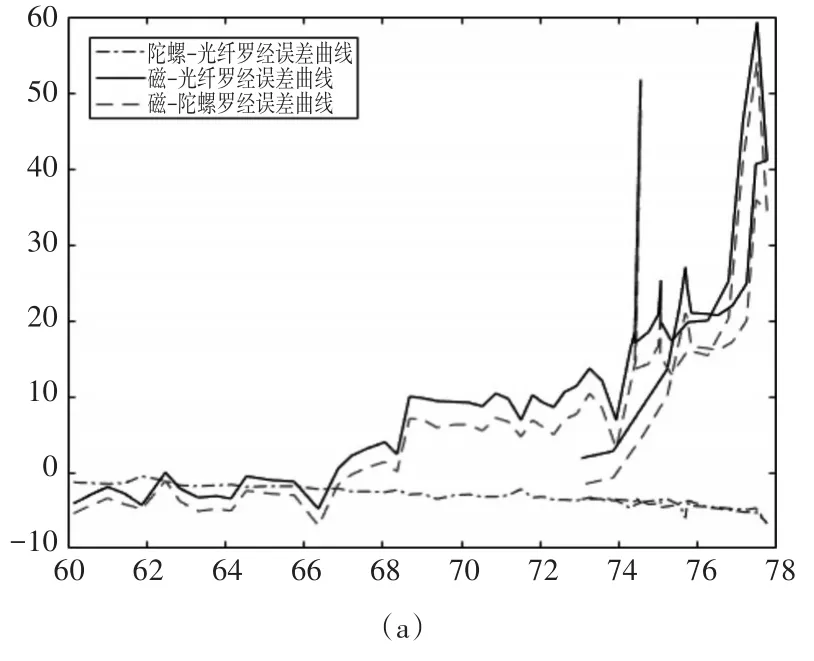
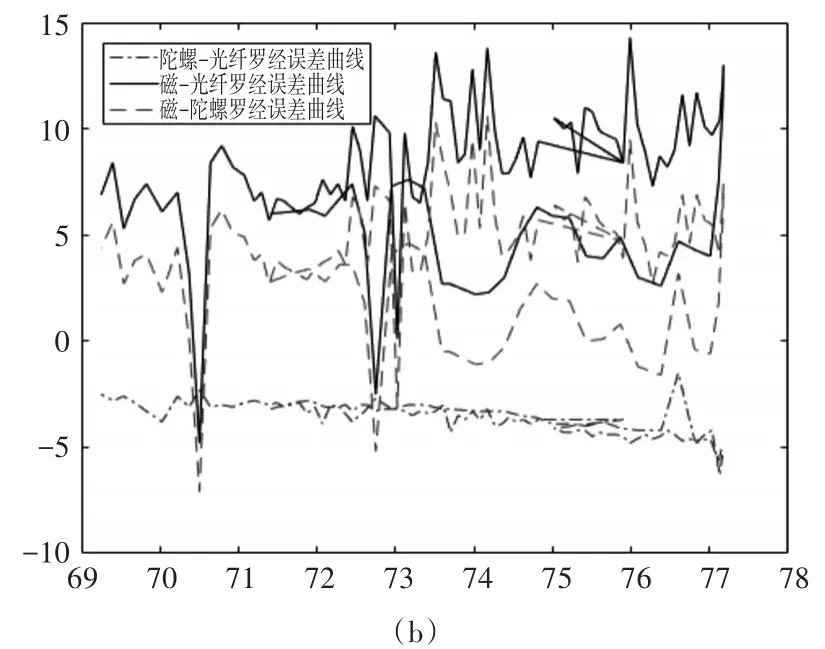
图2 三种罗经指向误差曲线
4 高纬海区罗经指向误差补偿模型构建
针对陀螺罗经和磁罗经的误差分布特性,考虑利用最小二乘法原理进行曲线拟合,从而得出北极高纬海区罗经指向设备指向误差的近似方程,进行航向补偿计算。
4.1 最小二乘曲线拟合
对于两个变量x、y的m组实验数据(x1,y1),(x2,y2),…,(xm,ym),令总误差为Q,则问题的目标是使为最小。将Q看成是关于aj(j=0,1,2,…,m)的多元函数,则拟合多项式的构造问题可归结为多元函数的极值问题[12]。令,则
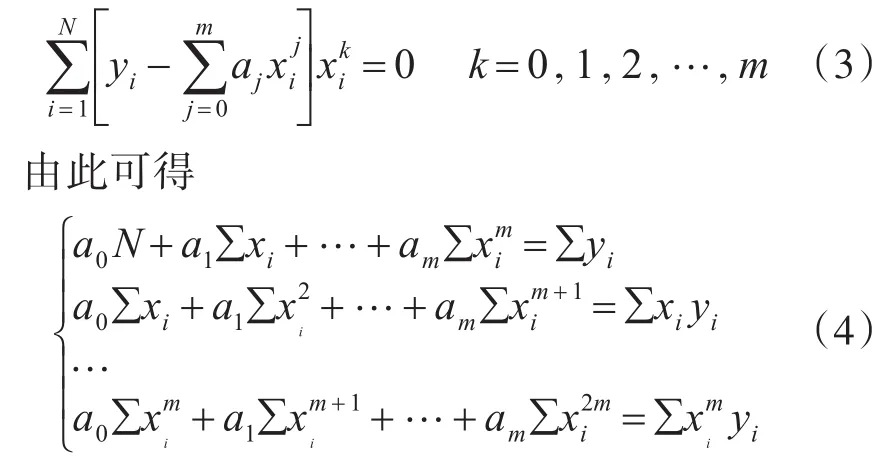
得到关于系数aj的线性方程组且只有唯一解,求解出aj从而确定了拟合函数[13]。
4.2 仿真实验结果分析
从满足实际使用需求的角度出发,为兼顾运算速度和经过测试,选取3次多项式进行拟合。其中,装载状态陀螺-光纤罗经误差拟合曲线如图3(a)所示,装载状态磁-光纤罗经误差拟合曲线如图3(b)所示,空载状态陀螺-光纤罗经误差拟合曲线如图4(a)所示,空载状态磁-光纤罗经误差拟合曲线如图4(b)所示,混合状态陀螺-光纤罗经误差拟合曲线如图5(a)所示,混合状态磁-光纤罗经误差拟合曲线如图5(b)所示。
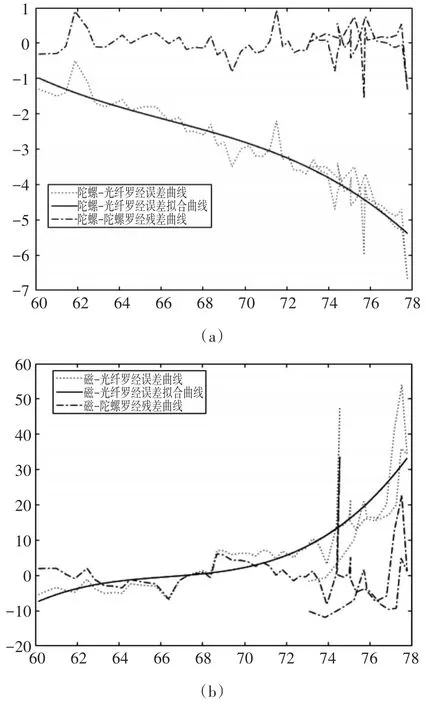
图3 装载状态罗经误差拟合曲线
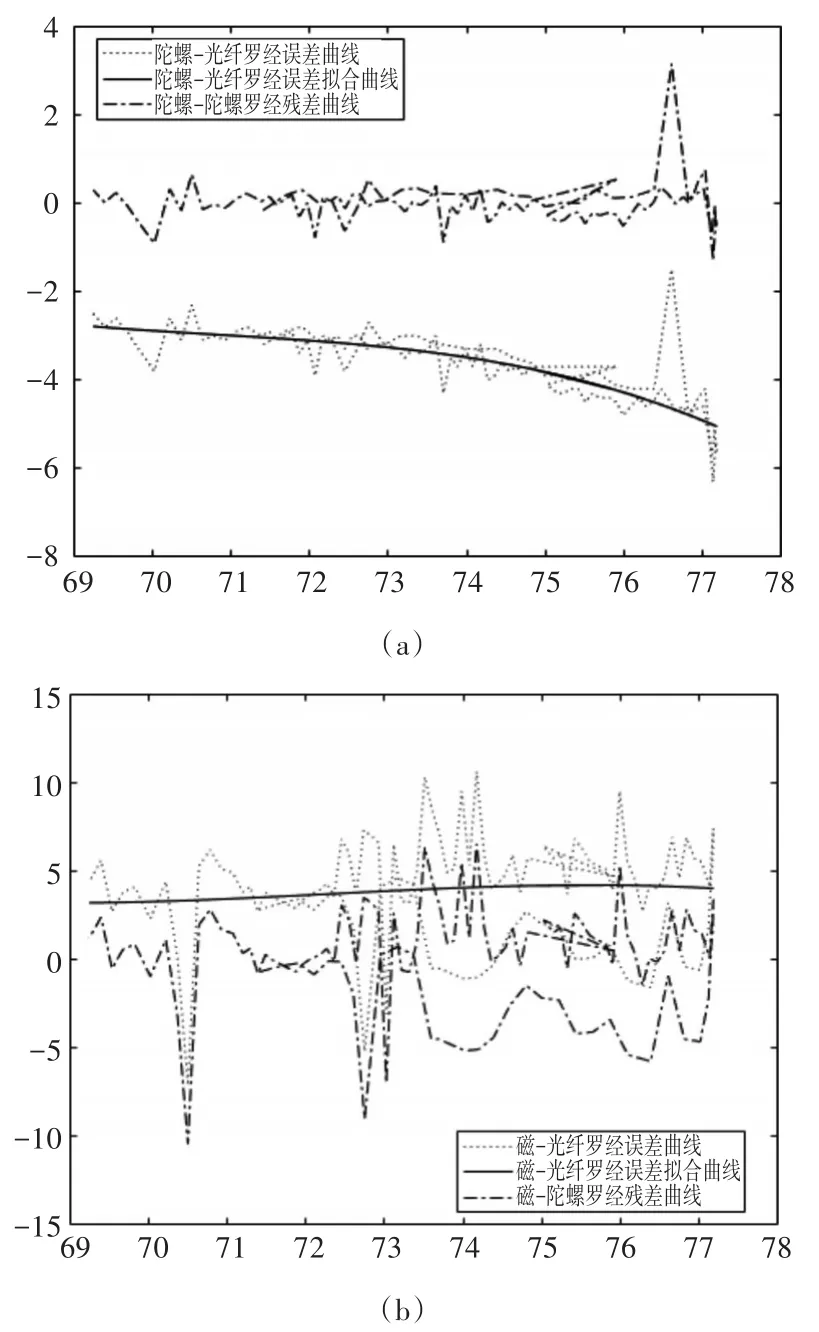
图4 空载状态罗经误差拟合曲线
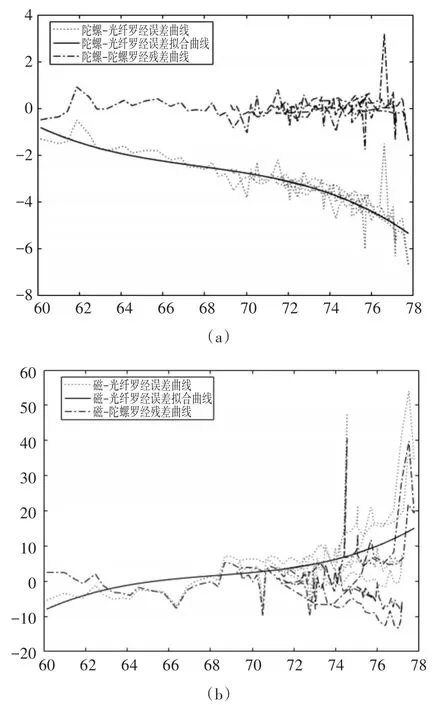
图5 混合状态罗经误差拟合曲线
陀螺罗经在满载或空载条件下误差补偿效果均比较好,通过误差补偿,误差减小超过90%,残差保持在0.5°以内,完全能够满足北极高纬海区指向要求;磁罗经由于纬度跨度比较大,而且由于奇异值的影响,误差补偿模型在不同的纬度效果区别比较大。在纬度65°以下区域,由于地磁场对磁罗经误差影响比较小,导致补偿模型拉大了原有误差;在纬度70°以下区域,补偿残差小于5°,同样由于磁罗经在该区域自身误差亦比较小,补偿模型效果不够明显,相对误差范围与原误差持平;在纬度70°以上区域,补偿模型效果较为明显,误差收敛较快。通过误差拟合建立补偿模型,能够显著降低罗经指向误差幅度,验证了方法的有效性。
5 结语
本文利用舰船在北极东北航道实测罗经指向数据,分析了磁罗经、陀螺罗经和GPS光纤罗经在北极高纬海区指向的稳定性和误差分布特性,针对北极高纬海区罗经指向误差大的突出问题,提出了运用最小二乘法进行数据拟合,建立罗经误差补偿模型误差处理方法,通过实验表明,该方法能够大幅度降低陀螺罗经和磁罗经指向误差,明显提高舰船罗经设备指向精度。
