双源无轨电车气动控制型集电器及其应用效果
2021-05-24北京公共交通控股集团有限公司
北京公共交通控股(集团)有限公司 孙 宇
双源无轨电车的电能来源有两部分,一部分来源于线网高压电源,另一部分来源于车辆本身配置的动力电池,由于配置的动力电池容量有限,双源无轨电车的驱动主要源自线网高压电源。集电器是无轨电车从架空线网获取电能的装置,当集电器搭触架空线网时,集电杆顶端的集电头与线网触线连通,架空线网的高压电通过DCDC隔离电源整流后传递给动力电池或驱动电机,为车辆提供源源不断的动力。气动控制型集电器是一种新型集电器,是对传统集电器的升级改造,有着明显的先进性和可推广性。
1 无轨电车传统集电器结构原理与存在问题
1.1 传统集电器结构及工作原理
双源无轨电车传统集电器主要由升降机构、集电机构、旋转机构、控制机构和固定机构等部分组成,传统集电器如图1所示。
升降机构是安装在旋转机构上可以使集电杆升杆和降杆的机构,主要包括举升弹簧总成、降杆气室、集电杆前叉和压集电杆摇臂等。当集电杆降杆时,驾驶员按下降杆按钮,降杆气室内的气压增加,推动压集电杆摇臂下压集电杆前叉,使集电机构脱线;升杆时,集电头需位于捕捉器正下方,驾驶员按下升杆按钮,降杆气室解除压力,在举升弹簧总成拉簧作用下集电机构向上运动,此时集电头通过捕捉器接触至架空线网,使得整车电路与架空线网连通。
固定机构是在集电杆下落到位后将其固定、防止集电杆左右晃动的机构。集电杆降至车顶处时,车顶尾部两个向下弯折的回转挂钩限制了集电杆水平旋转,限位示意如图2所示,升杆时,首先操控升降机构的降杆气室将集电杆下压,再将回转挂钩旋转一个角度,解除对集电杆上升空间的限制,集电杆即可顺利完成上升动作。此外,当集电杆被挂钩限位锁定时,旋转机构的锁定阀门也会接通,压缩空气经电磁阀进入水平旋转锁定气缸,推动活塞杆锁定旋转器。通过双重锁定,集电杆的左右旋转功能被限制。
1.2 传统集电器存在的问题
(1)自动捕捉成功率较低。由于传动集电器捕捉成功的关键取决于车辆停靠的位置是否合适,仅当双源无轨电车的集电头停靠在捕捉器正下方时,集电器捕捉线网时才会捕捉成功。因此传统集电器对驾驶员的驾驶技术要求较高,每当车辆停靠偏离捕捉器时,均会造成捕捉失败。

图1 传统集电器实物图
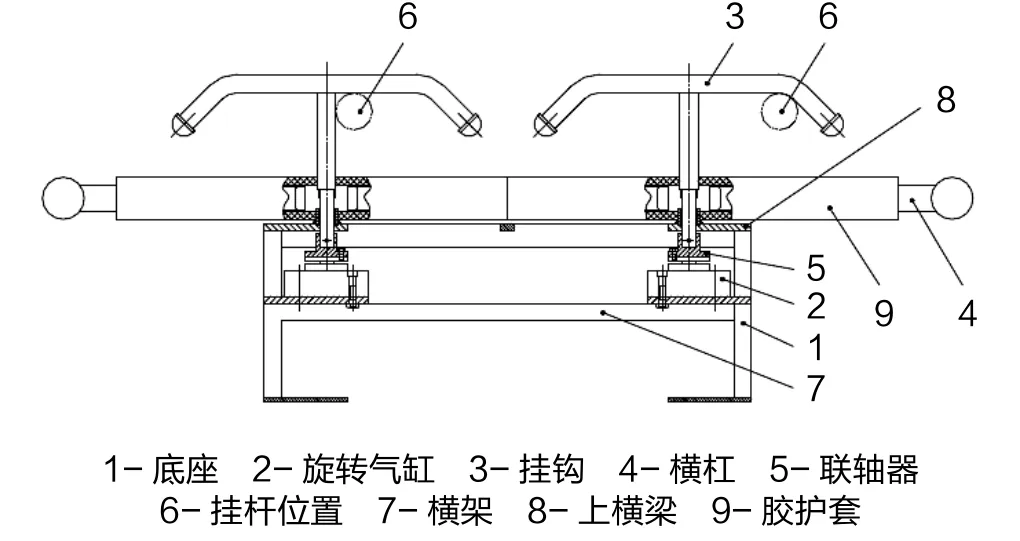
图2 固定机构结构图
(2)手工搭杆存在安全隐患。当集电器自动捕捉未能成功时,需要驾驶员或乘务管理员下车手动搭杆,基本上需要2-3min或者更长时间,容易造成交通不畅。驾驶员或乘务员下车搭杆时,身体暴露在车流中,存在较大的安全隐患。
(3)故障率较高。传统集电器解除降杆压力时,由于拉簧的拉力较大,集电杆接触线网时集电头会对架空线网造成一定程度的冲击,长此以往会影响集电头的使用寿命,致使集电头故障率较高。
2 气动控制型集电器结构原理与功能特点
气动控制型集电器是一种采用气动控制、图像识别技术实现集电杆自动捕捉线网的新型集电技术,具有先进的自动识别捕捉技术、脱线主动和被动安全技术,可有效解决传统集电器的诸多问题。相对于传统集电器,气动控制型集电器主要对集电器的基座总成及尾部收杆座总成部分进行了升级和优化,集电杆和集电头部分延用传统集电器的结构和技术。
2.1 气动控制型集电器主要结构
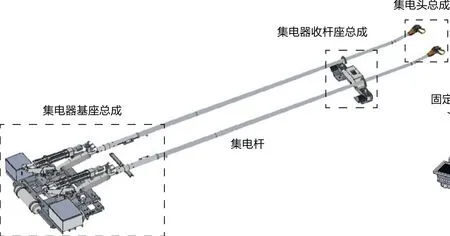
图3 气动控制型集电器主要构造
气动控制型集电器主要由基座总成、集电杆、收杆座总成、集电头总成等部分组成,整体构造如图3所示。
(1)基座总成。气动控制型集电器基座总成是集电杆的支撑部分,主要由四连杆机构、拉力弹簧、底座组件、电控单元和气控单元等部分组成(图4),主要作用是控制和执行集电杆的水平旋转和垂直运动,是新型集电器的核心机构。
(2)收杆座总成。气动控制型集电器收杆座总成主要用于集电杆的固定及对捕捉器的图像采集和识别,由固定钩总成、摄像头、补光灯等部分组成(图5)。
2.2 气动控制型集电器工作原理
气动控制型集电器具有自动捕捉、自动搭网功能,因此除正常智能控制外,还必须具有捕捉器信号采集、气缸水平控制定位功能。按功能模块划分,气动控制型集电器主要包含整车开关信号采集、整车网络通信、捕捉器信息采集、高压信号采集、气压检测、电磁阀驱动、传感器信号检测、摄像头清洗驱动、视频模组驱动等九大功能模块。

图4 基座总成主要构造
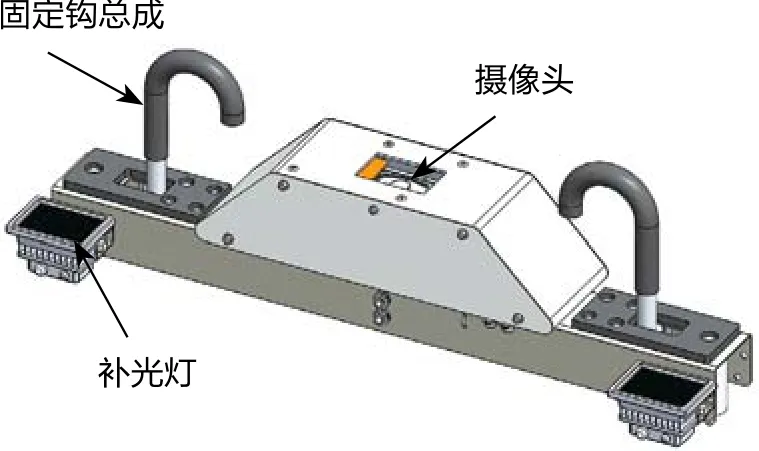
图5 收杆座总成主要构造
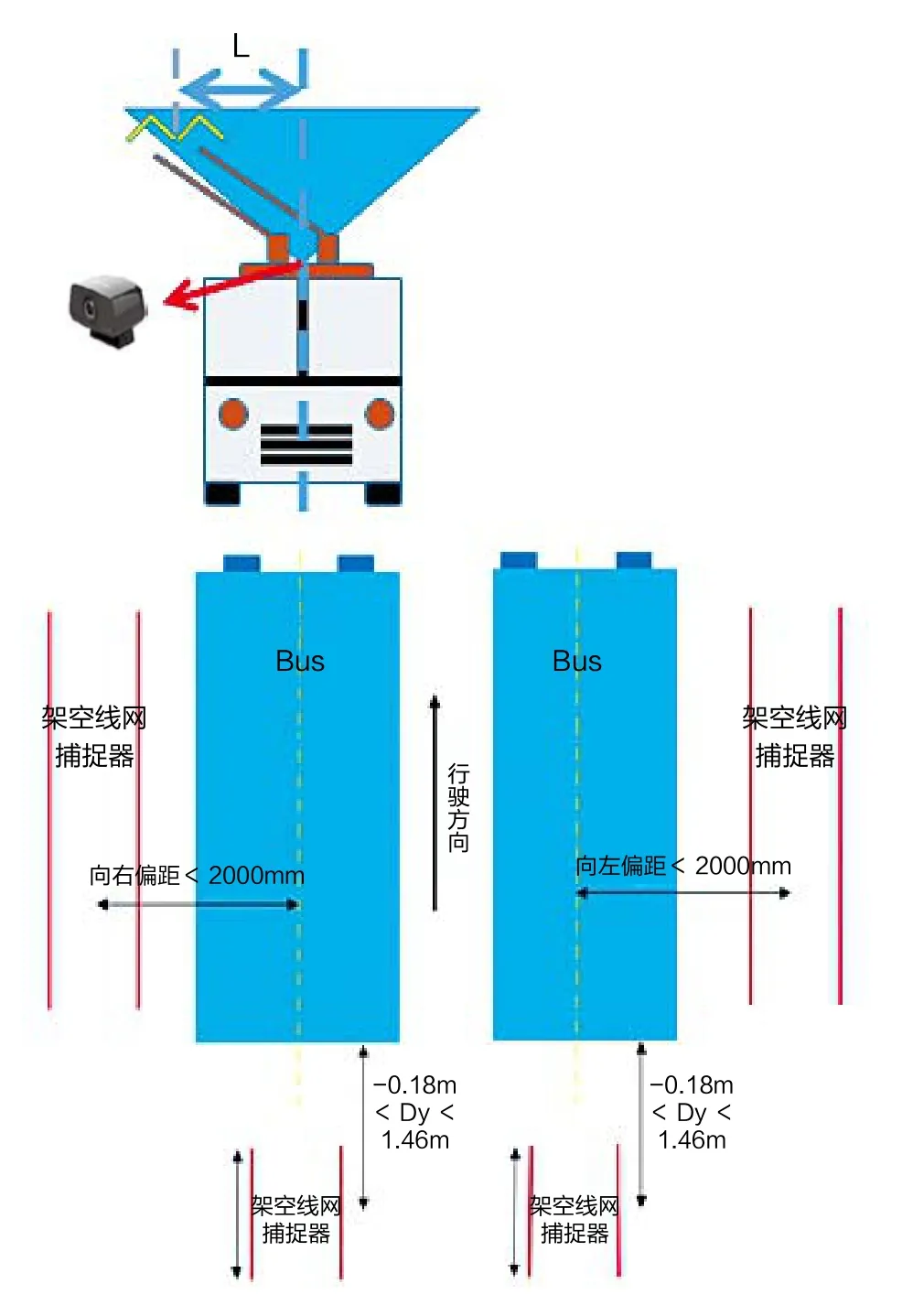
图6 车辆停靠位置示意图
气动控制型集电器工作原理如下:驾驶员将车辆停在架空线网捕捉器下,其中车辆停靠的左偏距或右偏距(车辆中心线到架空线网中心线的距离)不大于2m,如图6所示。驾驶员按下上升按钮,电控单元给出信号,电磁阀先驱动集电杆向下运动使其脱离尾钩限制,然后固定钩总成把尾钩打开,电磁阀驱动使集电杆缓缓升起;同时电控单元发送识别捕捉器指令,设置在车顶的摄像头捕捉线网捕捉器的影像(捕捉器下边缘倒三角特征),图像处理单元分析捕捉器影像与摄像头之间的相对位置关系,从而确认车辆与线网之间的偏距,计算出集电杆旋转角度,此时摇摆电磁阀驱动集电杆旋转至相应位置;集电杆在电磁阀的驱动下继续上升直至捕捉到线网,具体控制策略如图7所示。

图7 气动控制型集电器控制策略
气动控制型集电器利用优越的视觉软件算法,克服户外环境对视觉影像的干扰,极大提高了视觉影像偏距捕捉成功率。通过特定的偏摆运动算法,实现了大惯量情况下集电杆的摆动控制及精确定位,从而奠定了高成功率的自动捕捉功能。
2.3 气动控制型集电器功能特点
气动控制型集电器通过气缸运动控制集电杆的垂直和水平运动,实现集电杆的自动捕捉线网功能,与传统集电器相比,主要有以下特点:
(1)具有集电杆自动捕捉线网功能。在车辆偏离线网中心2m范围内可实现集电杆的自动捕捉,无需驾驶员手动搭杆。
(2)具有集电杆脱线主动保护功能。在发生大角度偏摆、集电杆脱网、线网有障碍物等情况下,无需驾驶员操作可实现集电杆主动快速降杆回中到快降位置锁紧,保护车辆、线网及道路交通安全。
(3)具有集电杆被动保护功能。设有紧急降杆按键,车辆在运营期间若发生任何紧急状况,驾驶员可通过操纵紧急按键,快速实现集电杆被动脱线保护至快降位置锁紧,脱线保护快速降杆执行时间小于2s。

图8 夜间环境采集的捕捉器图像
3 气动控制型集电器应用效果
截至2021年2月,气动控制型集电器在北京公交BJD-WG120FK型双源无轨电车上应用测试6个月,气动控制型集电器各项功能实现情况及整体应用效果良好。
(1)系统功能性。气动控制型集电器可在车辆中心线偏离线网中心±2m范围内实现自动捕捉线网功能,对车辆停放位置要求较为宽松,而传统集电器对车辆停放位置要求非常严苛,车辆必须停放在捕捉器正下方。相比而言,在集电器捕捉线网过程中,新型集电器降低了对驾驶员驾驶能力的要求,同时提升了车辆的运行效率。
此外,在夜间测试环境下,收杆座总成的LED补光灯可有效保证图像采集装置清晰、准确地采集到捕捉器图像(图8),保证集电杆在夜间环境精准捕捉到线网。在雨天环境下,收杆座总成具有图像采集装置擦拭功能,可保证镜头在雨天或其他恶劣天气下始终处于清洁状态,同时图像采集装置安装在防护罩内,采集图像时绝缘滑盖可自动打开,使视觉影像得到有效防护(图9)。

图9 收杆座总成镜头保护功能示意
(2)系统可靠性。统计分析气动控制型集电器在整个测试期内的自动捕捉功能运行情况可知,气动控制型集电器在操作升杆开关到集电杆自动捕捉线网动作完成所需时间及操作降杆开关到集电杆完成收杆动作所需时间均在15s内,可满足集电杆自动捕捉的时间要求,提升自动捕捉效率。同时通过统计分析集电器的一次捕捉完成情况可知,气动控制型集电器在整个测试期内的自动捕捉成功率在90%左右,而传统集电器的一次捕捉成功率一般在65%左右,气动控制型集电器的自动捕捉成功率大大提升。
(3)系统安全性。按照双源无轨电车产品耐压标准对气动控制型集电器进行绝缘和耐压测试,绝缘测试结果为高压对车身绝缘阻值大于200MΩ;对系统进行3500VAC/60s/50Hz条件下的耐压测试,漏电电流小于10mA,表面无跳火和绝缘材料击穿等现象,满足双源无轨电车的耐压性能要求。
此外,还验证了气动控制型集电器的主动与被动脱线保护功能。在车辆发生大角度偏摆、集电杆脱网、线网有障碍物等情况下,主动脱线保护功能可实现集电杆自动快速降杆至快降位置并锁紧的功能,气动控制型集电器脱线保护降杆迅速,执行时间短,一般在1.7s左右,可有效避免降杆时间过长集电杆横扫周围障碍,引发重大运营事故的问题。当车辆在运营期间发生任何紧急状况,驾驶员可通过紧急按键快速实现集电杆被动脱线保护至快降位置并锁紧的功能,被动脱线保护快速降杆执行时间在1.7s左右。
气动控制型集电器运行稳定,故障率较低,可有效提高无轨电车运行效率,大大降低了驾驶员的劳动强度,同时也避免了传统集电器需驾驶员下车手动搭杆所带来的人身安全风险,值得在双源无轨电车上推广应用。
