基于BDS的RTK模式定位精度分析
2021-05-24杨泰朋宣善钦
杨泰朋 宣善钦 刘 流
(国网安徽省电力有限公司建设分公司,安徽 合肥 230022)
1 概述
全球卫星导航系统(GNSS)凭借其全天候、连续服务的特点,全球用户可实现三维、高精度的定位、导航与授时服务(PNT),其在国家安全和国民经济建设等诸多领域发挥了举足轻重的作用。北斗系统作为我国拥有自主知识产权的卫星导航系统,按“三步走”策略推进建设,即北斗导航试验系统(BDS-1)、北斗区域服务系统(BDS-2)、北斗全球服务系统(BDS-3)。2012年12月,BDS-2宣布提供覆盖亚太预期无源PNT服务;2018年12月,BDS-3最简系统建成,并着手提供全球范围内的PNT服务;2019年12月,BDS-3全球系统核心星座部署完成。当前,包括超过40颗北斗卫星(4 BDS-3s,15 BDS-2,25 BDS-3)、80颗GNSS卫星(31 GPS,26 Galileo,27 GLONASS)共同为全球用户提供高精度PNT服务。同时,BDS-3将于2020年实现30颗工作卫星组网(3 GEO,3 IGSO,24 MEO),届时将真正实现北斗全球服务。
RTK技术是卫星导航定位技术的重要应用,极大地提高了定位的效率,在国防、农业以及工程项目中得到了广泛的应用[1]。罗卫国从系统性能、定位精度等方面对基于BDS的RTK进行了评价[2]。邓思胜基于广东省CORS系统,从内符合精度评定、重复性精度评定、外符合精度、初始化时长等方面对RTK定位结果进行了统计和比对分析[3]。侍荣等基于南京国土北斗地基增强项目系统地建立了评价BDS的定位性能指标[4]。蔡东健等基于苏州CORS系统研究了BDS/GPS/GLONASS三星系统的定位精度[5]。叶方宇对福建BDS地基增强的CORS系统进行了精度测试[6]。魏刚等对北斗二号与北斗三号的定位精度进行了分析比较,结果表明北斗三号的定位精度优于北斗二号[7]。
鉴于BDS推广应用是下一步发展趋势,本文主要研究目的是在RTK模式下,分别采用固定基线与动态轨迹检测法,对BDS定位精度进行测试与分析,为BDS进一步应用于实际工程项目中提供参考。
2 BDS-3数据质量分析
在开展北斗RTK定位性能分析前,有必要针对当前北斗三号多频观测数据质量进行系统分析,实验主要选取iGMAS跟踪网多频观测数据(测站分布如图1所示)[8],相应的测站列表如表1所示,分别从数据完整率、信噪比、多路径延迟量以及电离层延迟变化率等五个角度进行分析。


表1 iGMAS跟踪站信息
2.1 数据完整率
GNSS接收机观测数据完整率是卫星可用性以及定位服务可靠性主要指标之一,其计算公式可表示为RINEX文件中完好的观测历元与理论历元数的比值[9],即:
(1)
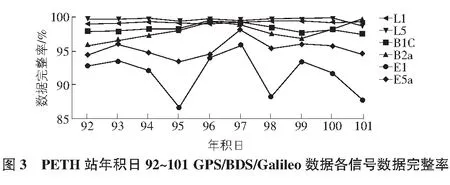
其中,i,j分别为频率与卫星。图2中统计了19个iGMAS测站(年积日92~101,2020)BDS-3的(B1C/B2a)数据完整率均值。结果表明,BDS-3不同测站数据完整率均优于90%,不同测站、频率差异较小。同时图3中给出了GPS/GLONASS/Galileo不同频率数据完整率统计,从结果可以看出GPS明显优于其他系统,Galileo的E1性能最差。
2.2 观测数据信噪比分析
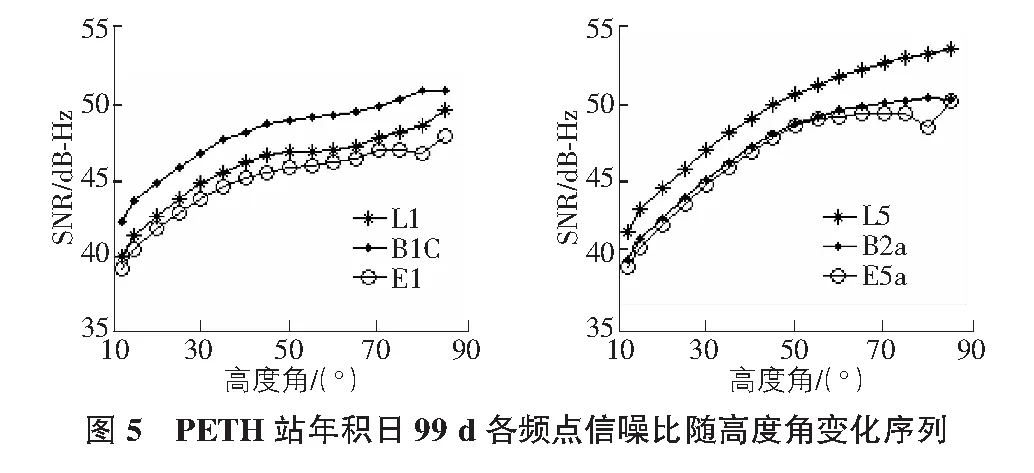
不同观测数据信噪比是反映信号质量的主要参数之一,其可从RINEX文件中直接提取,理论上该值越大,观测数据质量越优[9]。与数据完整率实验类似,分别统计了19个测站的信噪比均值,如图4所示。同时,图5中进一步基于PETH站对比分析了GPS(L1/L5),Galileo(E1/E5a)随高度角变化信噪比序列。结果表明,高度角越大信噪比则越大,且逐渐变缓;BDS-3的B1C优于L1/E1结果。


2.3 观测数据多路径延迟分析
隐含于卫星观测数据中的多路径延迟是GNSS定位中的主要误差源之一,其计算与提取公式可表示为[10]:
(2)
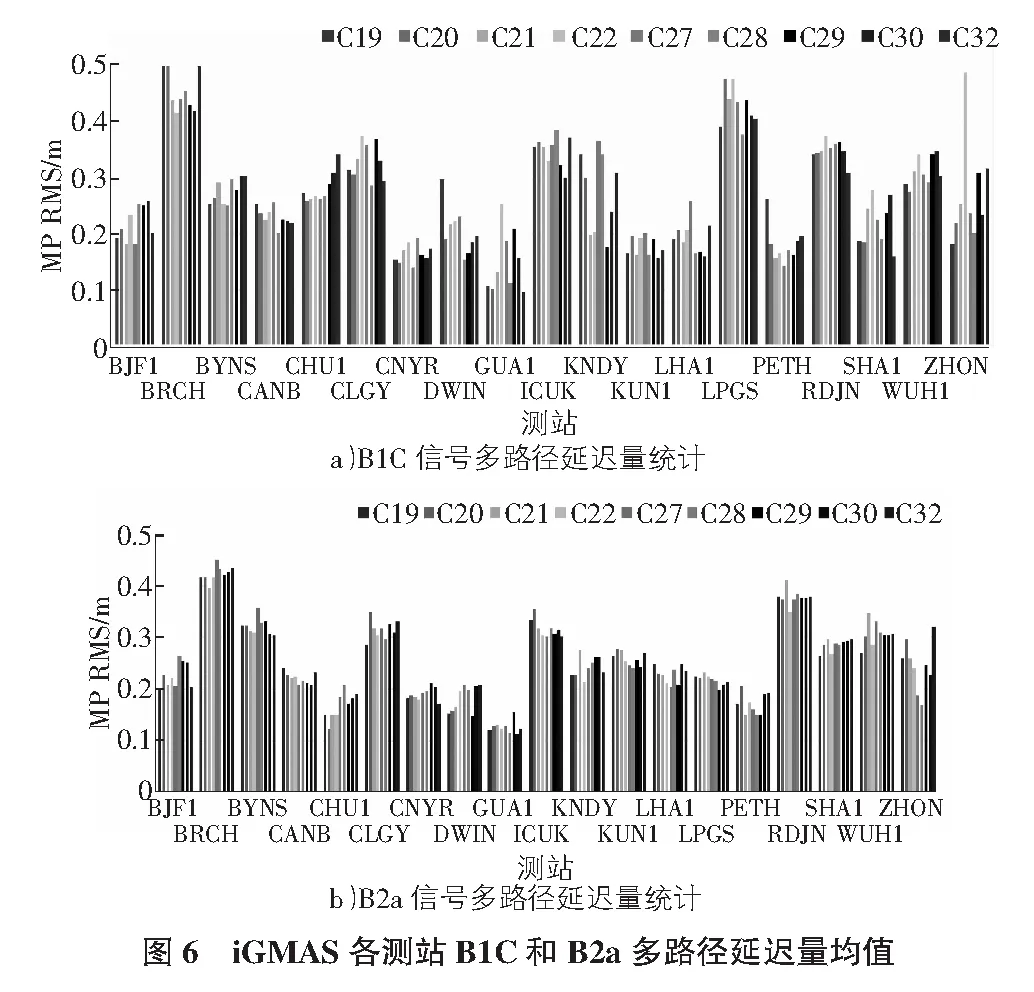
其中,i,j分别为同频率;P,φ分别为伪距与相位观测值;λ为波长。从图6可以看出,B1C不同站点之间存在较大差异,其中最大值为0.54 m,最小值为0.1 m;B2a相比较变化浮动较小,最大值为0.45 m,最小值为0.11 m。
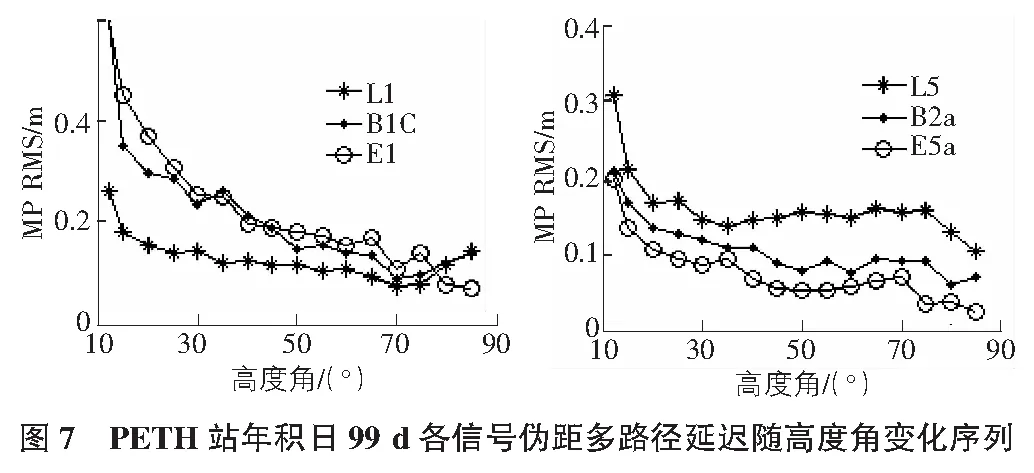
为进一步分析多路径延迟与卫星高度角之间相关性,以5°间隔统计了不同区间内多路径延迟量,图7中给出了PETH相应的结果。结果表明,各卫星信号的多路径延迟与高度角具有强相关性,即随着高度角增加而减小;且针对同一高度角,L1优于B1C和E1,在低高度角时差距较大,随高度角增加差异逐渐减小;且BDS新信号与GPS,Galileo重叠频率有差距,但处于同一量级。
2.4 电离层延迟变化率分析
电离层延迟变化率(IOD)是指单位时间内电离层延迟变化情况,其能反映电离层的活跃程度,也是衡量数据质量的重要指标之一[11]。一般认为,IOD≥4 m/min时,电离层过于活跃。卫星频点i的电离层延迟变化率可表示为:
(3)
其中,tk为第k个历元。图8给出了9颗BDS-3卫星在19个iGMAS测站上2020年92 d~101 d B1C和B2a的电离层延迟变化率均值统计结果。

从图8可以看出,B1C信号不同测站间差异较小,且相同测站不同卫星间差异较小,说明BDS-3不同卫星之间具有较好的一致性;而B2a不同测站差距较大,但同一测站不同卫星间差异同样较小。同时,图9给出了PETH站99 d不同信号与高度角的变化关系,整体呈负相关趋势。

3 测试方法
本节将基于BDS-3观测数据,对RTK定位性能进行测试分析。本文测试方法根据CJJ/T 73—2010卫星定位城市测量技术规范中所采用固定基线检测与动态轨迹检测法,具体测试方法如下:
1)固定基线法。
如图10所示,选取一条固定直线进行10等分,以其中一个点为基准点,首先采用RTK定位技术测出每个点位坐标,通过距离公式(1)反算出其余各点与基准点之间的距离,然后采用全站仪测出基准点到其余各点之间的距离。通过各点到0点距离进行比较分析,以此来评价动态定位的精度,具体计算方法为:
假设基准点坐标为(x0,y0),第i个基线点坐标为(x1,y1),则0到1点的距离为:
(4)
2)动态轨迹检测法。
如图11所示,首先采用全站仪布设ABCD为一个规则的矩形,其中A,B,C,D点坐标通过全站仪进行测角与测距计算以其中一个端点为基准的相对坐标,然后沿着矩阵采用RTK进行定位,在4个端点进行重复采样,取平均值作为端点的最终坐标。采样完成后,将RTK获取的坐标以相同的基准点换算为相对坐标;最后以全站仪所测的相对坐标获得四条边的直线方程,并计算RTK所测点位的相对坐标计算到相应直线距离的标准差,以此来评价动态定位的精度,具体的计算方法为:
假设A点坐标为(x1,y1),B点坐标为(x2,y2),则可求出AB的直线方程:
(5)
假设随机采样点的坐标是(xi,yi),则点到直线AB的距离d为:
(6)
再求这些距离的标准差std:
(7)


3.1 固定基线检测实验
本次实验采用的仪器分别为中海达V60型GNSS接收机和科力达KTS-462R4L全站仪。表2为采用全站仪所测的各个基线点到基准点之间的距离,采用3个测回取均值作为最终距离观测值。表3为采用RTK所测各个点位坐标以及反算各个基线点与基准点之间的距离。由表3数据分析可知通过RTK测得各点坐标而计算出的两点间距离与全站仪实测距离差值最大9.6 cm,最小为2 cm,平均差值为6 cm。由此可知,基于BDS的RTK定位精度为厘米级,满足用户的日常使用。由表3可知:通过固定基线检测,GNSS定位结果反算点位相对距离与全站仪所测的结果相比,最大相差9.4 cm,最小相差2.0 cm,说明基于BDS信号的RTK模式的定位精度在厘米级。

表2 全站仪所测数据

表3 RTK所测数据与全站仪对比
3.2 动态轨迹检测实验
动态轨迹检测实验采用仪器与固定基线检测采用的仪器相同,具体结果见表4。由表4可知,RTK所测点到相应边长直线的偏离程度较小,最大9.3 cm,最小0.7 cm,标准差为2.7 cm,表明BDS信号下RTK定位模式可达到厘米级,与固定基线检测的结果一致,可以满足用户日常定位的使用需求。
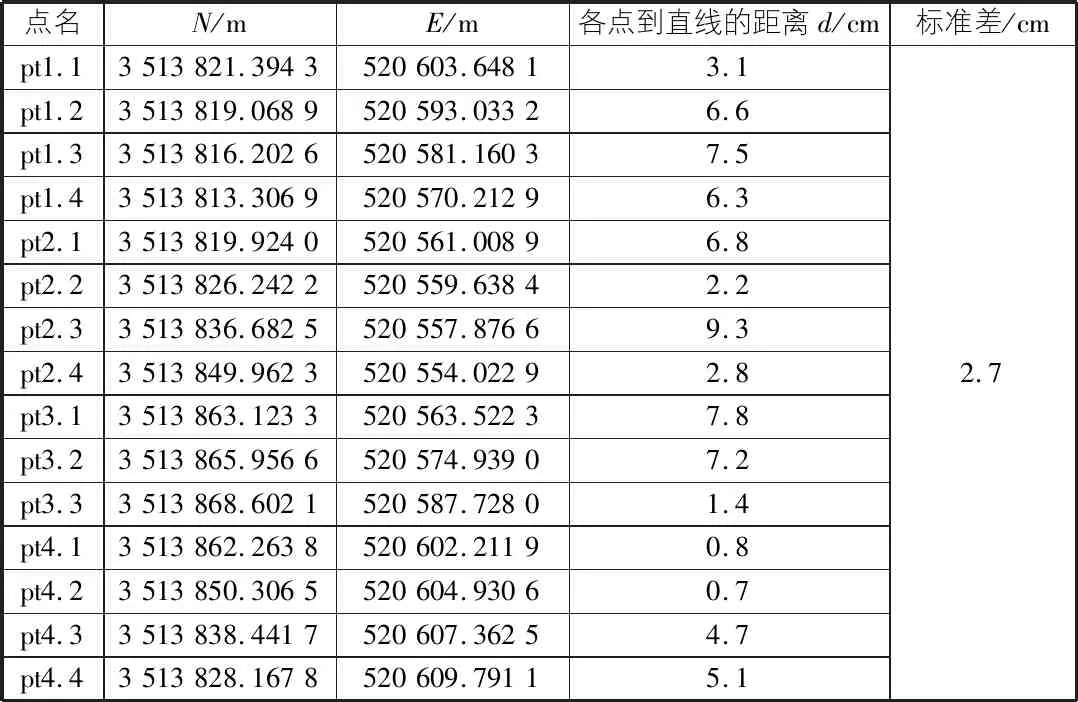
表4 各点到直线的距离以及标准差
4 结语
本文首先基于19个iGMAS测站分析了BDS-3观测数据质量,分别从数据完好性、信噪比、多路径延迟率以及电离层变化率四宫格角度详细对比分析了B1C与B2a与GPS,Galileo信号之间的差异;实验结果表明,BDS-3观测数据性能优越,B1C与B2a信号间差异较小,且数据质量与GPS,Galileo的同类频率处于同一水平,甚至更优。本文进一步通过固定基线和动态轨迹检测法,采用中海达V60 GNSS接收机对BDS信号下RTK定位模式进行精度测试与分析,定位结果表明:BDS信号下RTK模式的定位精度在厘米级,完全满足日常用户的定位需求;另外,本文解算结果均采用中海达仪器及配套的相关软硬件进行测试并对测试结果进行精度分析,由于缺少仪器等客观原因,尚未对不同品牌的GNSS接收机进行对比分析,因此,在后续的工作中应进一步展开,为BDS的拓展应用提供一定的实践意义。
