地外天体超声波钻探器研究与应用综述
2021-05-24王童照全齐全黄江川唐德威孟林智赵志军邓宗全
王童照,全齐全,黄江川,唐德威,郭 璠,孟林智,赵志军,邓宗全
(1. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001;2. 中国空间技术研究院,北京 100094;3. 北京空间飞行器总体设计部,北京 100094)
0 引 言
在未来深空探测任务中,采样作为一个重要环节是获取星体信息最直接的方式。星体的表层物质受宇宙风、尘暴和流星撞击等影响严重,所保留的星体原始物质信息较少;星体次表层的物质受外界环境影响较小,更有利于获取有价值的信息,对研究太阳系星体演化规律和人类生命起源具有重要意义[1-3]。钻探采样是获取星体次表层地质样品的有效途径之一。通过钻进取芯的方式可以获取保留完整地质层序信息的样品[4]。然而在星体表面实施钻进任务时面临钻探环境恶劣和引力微弱的环境特点,钻探采样对钻机提出了环境适应性强、低功耗和低轴向力的要求。压电驱动的超声波钻探器可以满足这些要求,超声波钻探器具有所需钻压力小、结构简单、功耗低、耐温范围宽(-200 ℃~500 ℃)和无需润滑等突出优点[5],比传统电磁电机驱动的钻探器更适用于微弱引力下星体的钻探采样任务。
目前,国内外研制的超声波钻探器依据作动方式主要分为三类:直驱式超声波钻探器、冲击式超声波钻探器和回转冲击式超声波钻探器。直驱式超声波钻探器研究最早,由美国喷气推进实验室(Jet Propulsion Laboratory, JPL)提出,验证了适应于火星环境的超声波钻探器具有低功耗、低钻压和耐温范围宽的工作特点[6]。冲击式和回转冲击式超声波钻探器在直驱式超声波钻探器的研究基础上致力于提高钻进取芯效率,受到了广泛的研究,被定位于协助星体探测器和漫游车的钻探平台[7]。超声波钻探器作为钻探平台对星体探测具有重要意义,主要体现在:1)超声波钻探器所需钻压力小、功耗低可以极大地节省探测器的能源;2)超声波钻探器对不同硬度的硬脆性介质均具有很好的可钻性,这增加了采样地点选择的多样性;3)超声波钻探器可以产生完整的异型孔有助于实现十米左右的钻进深度;4)超声波钻探器自身的声纳传感特点能够实现钻进过程的钻探一体化。
苛刻的空间环境对超声波钻探器技术研究具有极大的挑战[8-9]。月球表面温度-233 ℃~180 ℃、火星表面温度-120 ℃~35 ℃、小行星表面温度-188 ℃~120 ℃、金星表面温度465 ℃~500 ℃,星体表面存在的高低温环境对超声波钻的谐振频率和各部件之间的力学性能产生巨大影响[10-11]。星体表面的介质硬度不确定,这要求超声波钻探器能够适应不同硬度等级的介质。在钻进过程中可能面临地质层结构的变化,这要求超声波钻探器需要针对被钻介质的变化及时调整钻进参数以保证钻进稳定性。星体表面往往还存在着真空、强酸和宇宙辐照等苛刻环境,这些对超声波钻探器的影响还尚不清晰。
本文基于国内外已有的超声波钻探器的研究进展,分析各超声波钻探器方案的特点和存在的不足。同时,对超声波钻探器的各部件间动力学仿真模型、结构优化成果、驱动电源控制方法进行分析与讨论。并基于在未来深空应用中的预研成果对超声波钻探器研制过程中的关键问题给出一些具体建议。
1 超声波钻探器研究进展
超声波钻探器在1998年由JPL首次提出以来,主要作为地外天体探测的钻探平台被广泛研究。JPL开发了多种构型和功能的超声波钻探器,并对其性能进行了不断优化。欧洲和俄罗斯的学者对超声波钻探器的性能提升和非线性动力学分析方面也做了大量的工作。同样,超声波钻探器也吸引了国内学者对其进行深入研究。以下将分别探讨各科研机构对超声波钻探器的研究进展。
1.1 美国喷气推进实验室
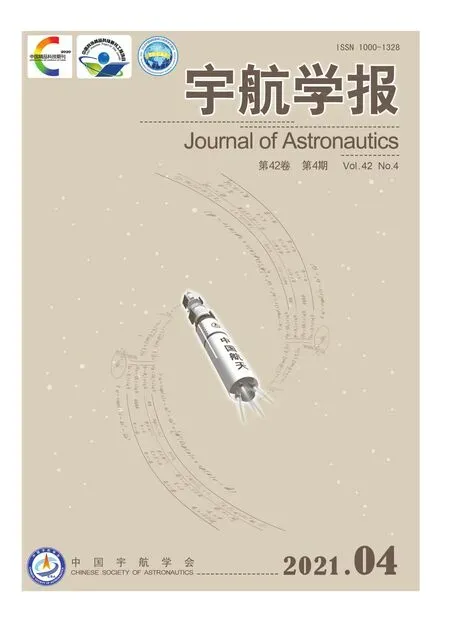
JPL创新性的提出超声波钻探器的概念,以低功耗和环境适应性强为设计目标,开发出了第一代直驱式超声波钻探器(Ultrasonic Core Driller, UTCD),发现了它比传统钻机具有低功耗、低钻压力和耐高低温的突出优点。但是由于UTCD的钻进速度较慢,在JPL后续的研究中提及较少。为了进一步提高UTCD的钻进速度,Bar-Cohen等[12]在压电换能器与钻杆之间引入自由质量块,研制出了冲击式超声波钻探器(Ultrasonic/Sonic Drilling/Cori-ng, USDC)。自由质量块将压电换能器传递的20 kHz超声频振动转换为60~1000 Hz声波的组合,激励钻杆钻进岩石内部。整个钻进过程中孔的形状保持完整,通过改变钻头的形状可以得到不同的钻孔形状,这一独特的孔型保持能力也是优于传统钻机之处。自由质量块的引入使得超声波钻探器的钻进速度得到大幅提升,这也使USDC成为超声波钻探器广泛研究和应用的原型。USDC钻进实验如图1所示,钻压力5 N,功耗5.3 W时,在砂岩上的钻进速度为2.4 mm/min。在钻进过程中只需要单手扶持钻机的电源线即可[13-14]。
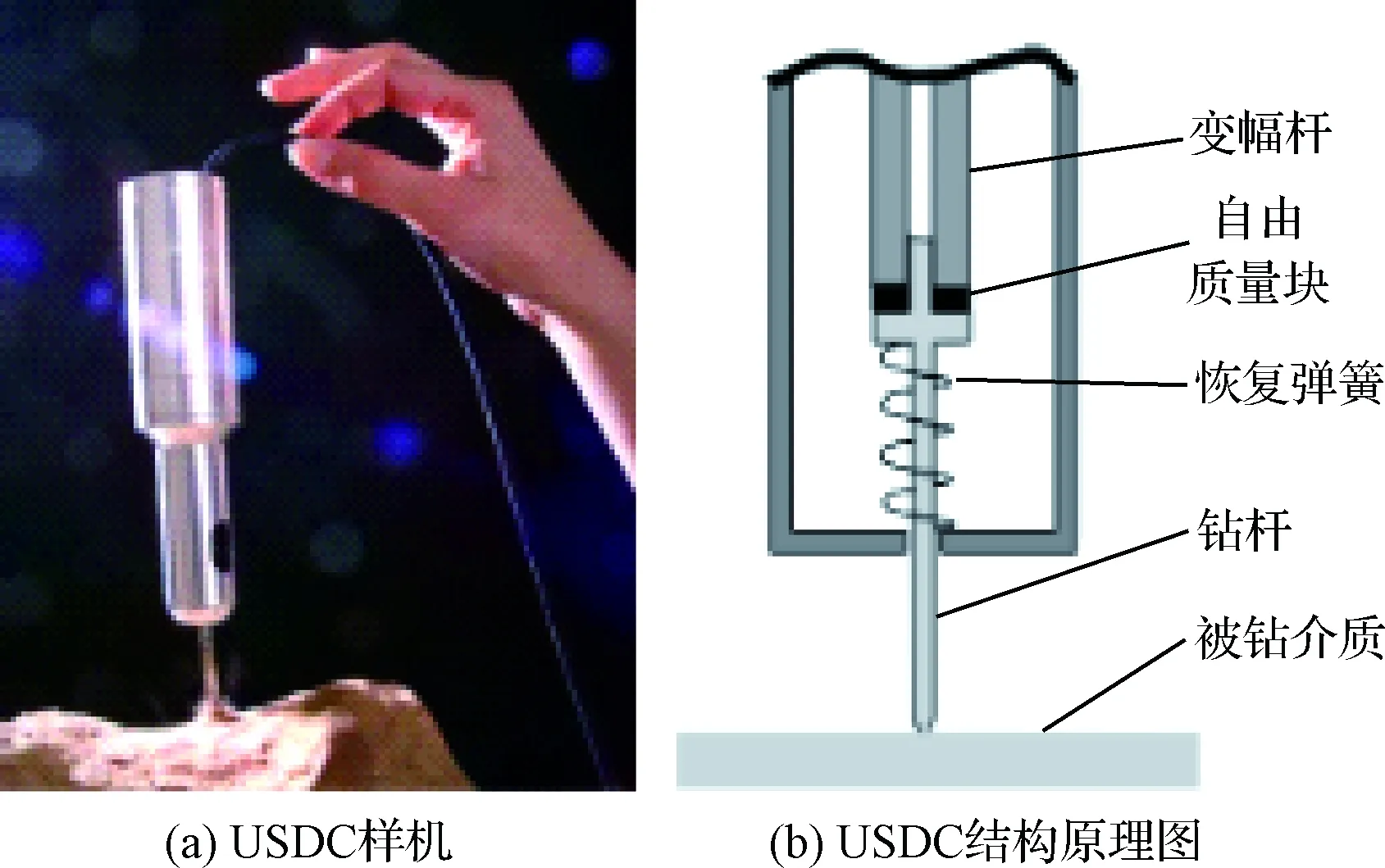
图1 JPL研制的USDC与结构原理图[13-14]Fig.1 USDC developed by JPL and its schematic structure[13-14]
虽然USDC的钻进速度得到了提升,但是存在排屑困难的问题。随着钻孔深度增加,产生的钻屑很难及时排除,这对钻进稳定性和深度取芯将造成不利影响。为了获取火星、木卫二、土卫二地表冰层以下有一定深度的样品,JPL在USDC的基础上又开发了Ice-Gopher冲击式超声波钻探器[15]和Auto-Gopher-Ⅰ和Auto-Gopher-Ⅱ回转冲击式超声波钻探器[16],在冰面的钻进深度可达30 m。Auto-Gopher系列的超声波钻探器由冲击破碎被钻介质的USDC和驱动钻杆回转的同轴电磁电机两套系统组合而成,具有自动断芯、取芯、送芯、嵌入电子仪器和自动故障诊断五种功能[17]。Auto-Gopher系列在实验测试中深度取芯性能表现突出,但是电磁电机驱动回转的方式增加了装置的复杂性,这对降低探测器载荷质量是不利的。由此,JPL探索了利用单压电陶瓷叠堆驱动变幅杆前端既实现冲击又实现回转以简化Auto-Gopher系列的结构,并研制了一套Single Piezo-Actuator Rotary-Hammering Drill(SPaRH)原理样机[18],但是仍然存在变幅杆纵振与扭振的强耦合作用使得钻杆的回转运动不连续问题,降低了能量传递效率。钻压力3 N、功耗100 W时,SPaRH在砂岩上的钻进速度为8 mm/min。
1.2 格拉斯哥大学
格拉斯哥大学也进行了直驱式、冲击式和回转冲击式三种超声波钻探器类型的研究。2008年,提出在阶梯型纵振压电换能器上通过切斜槽方式增加扭转振动以提高直驱式超声波钻探器的钻进速度,研制了两种压电换能器:一种是在变幅杆大径端切斜槽实现纵扭模态耦合,另一种是在变幅杆小径端切螺旋槽实现纵扭模态退化[19]。研究指出当需要纵扭分量均较大时采用模态退化型设计,需要突出纵扭复合中的某一种振动分量时采用模态耦合型设计。由于这两种压电换能器与钻杆紧密连接,相比JPL研制的SPaRH改善了钻杆纵扭运动不连续的缺点,但是仍然存在扭振能量双向传递的问题,从而造成换能器额外的温升和疲劳。为克服这一问题,2009年提出在压电换能器的变幅杆前端周向加工三层径向斜槽孔洞的方案[20-21]。通过控制斜槽孔洞的孔柱分布方向有效克服了扭振的双方向传递问题,使振动能量集中在变幅杆前端。优化后的钻探器在钻压力12 N、功耗40 W时,达到钻进速度2.2 mm/min,虽然钻速较慢,但其作动方式具有很好的借鉴意义。
2010年,在对冲击式超声波钻探器的改进研究中,借助ANSYS软件探讨了压电换能器的中空结构和自由质量块的数量对取芯速率的影响,发现使用阶梯型实心压电换能器的取芯效果优于狗骨型空心换能器,布置单一自由质量块时可以获得理想的有效冲量[22]。此外,针对冲击过程中变幅杆前端易发生疲劳破坏问题,采用增加硬质金属保护层的措施,研究了保护层对软化效应、滞回效应等非线性因素和钻进速度的影响。
在回转冲击式超声波钻探器的研究中,提出了三种新构型。2011年,研制了一种由电磁电机激励钻杆回转的超声波钻探器,钻杆与电磁电机同轴布置并通过花键连接[23]。同时提出了第二种新构型的设想,但是没有研制样机进行实验验证。即利用凹槽结构将变幅杆前端产生的纵振和扭振能量分离[24]。钻杆的纵向运动由冲击头纵向冲击自由质量块产生,扭转运动由一个可移动的内六角套筒布置在凹槽柱与钻杆之间依靠摩擦转子传递。纵扭运动分离的想法具有很大研究价值,它避免了纵扭同时驱动自由质量块时导致的钻杆回转不连续问题。2018年,开发了第三种由电磁电机激励的超声波钻探器(Ultrasonic planetary core drill,UPCD),钻杆与电机平行布置并通过齿轮机构连接,最优钻速达到6.2 mm/min。Li等[25]希望获得全波长换能器与半波长换能器对UPCD有效冲量和钻进速度影响的区别,如图2所示,但是通过仿真与实验研究均未获得二者之间的明显差别。
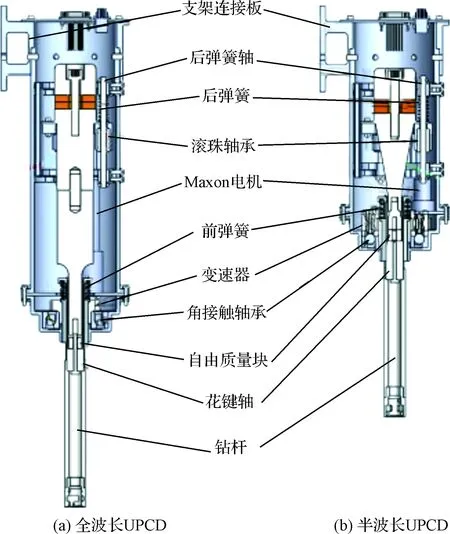
图2 格拉斯哥大学研制的回转冲击式超声波钻探器[25]Fig.2 Rotary-percussive ultrasonic drills developed by UOG[25]
1.3 俄罗斯比斯克超声技术中心
俄罗斯比斯克超声技术中心研制的超声波钻探器以直驱式为主。2012年,为了提升脆性和硬质材料的钻进取芯自主性,依据钻杆的类型先后提出了两种直驱式超声波钻探器[26]:被动型和主动型。被动型钻杆在深度钻孔时存在钻杆外壁碰撞钻孔和磨料不方便注入问题,而主动型钻杆可以通过内腔注入磨料液,且主动型钻杆设计为阶梯型避免了在钻进过程中与钻孔之间的碰撞。被动型钻杆和主动型钻杆均可以通过螺纹连接、夹头加紧和焊接三种方式紧密安装在压电换能器上。但为了保证传递到钻具的振幅强度,只有钻杆直径大于3 mm时才可以选择夹头加紧和焊接钻杆的方式。
2013年,与俄罗斯科学院空间研究所合作研制了面向月壤取芯的直驱式超声波钻探器,重点研究了钻头的端面振幅和摩擦温升对钻进取芯过程的影响[27]。由于取芯时钻杆的温升会影响地质样品的真实信息,采取在压电换能器和钻杆之间增加多个半波长波导管的形式避免压电陶瓷的热量向钻具传递。具有一定长度的波导管也有助于实现月面次表层样品的采集。该钻探器可以在模拟月面温度-130 ℃环境下工作15 min后仍然保持钻杆表面温度在0 ℃以下。除此,为了实现在钻进深度增加的同时对破碎的介质进行原位分析,提出了中心结构为锥形、四周分布通孔的特殊钻头[28],并研究了该钻具与泡沫混凝土、水沙混合物、油沙混合物在钻进过程中的温升和阻尼特性。
图3 用于模拟月壤采样的超声波钻探器[26-28]Fig.3 Ultrasonic equipment for the intake of Lunar soil[26-28]
1.4 帕德博恩大学
帕德博恩大学主要针对冲击式超声波钻探器做了动力学建模和结构参数优化的研究。2006年,帕德博恩大学提出一种基于自适应细分技术面向集合的数值方法用于求解不规律或混沌系统周期解[29]。该方法可以快速获得冲击式超声波钻探器整体动力学的信息,有助于分析自由质量块的混沌动力学行为,指导压电换能器的谐振频率设计、自由质量块的参数选型,评估钻杆的钻进特性。
由于传统圆盘形的自由质量块在碰撞运动时严重晃动,无法对测试的自由质量块接触信号进行有效分析。2007年,帕德博恩大学研制了一种由8 mm直径钢珠代替圆盘形自由质量块的冲击式超声波钻探器[30],如图4所示。为了定量描述该超声波钻探器的换能器端面振幅、激励频率和自由质量块的质量,采用有限元方法和具有黏弹性Kelvin-Voigt元素的离散模型方法建立了冲击式超声波钻探器的整机动力学模型[31]。但是,该模型中忽略了压电换能器本体质量的影响。压电换能器的本体质量是准确分析变幅杆有效冲量的关键因素。
图4 帕德博恩大学研制的超声波钻探器[30]Fig.4 Ultrasonic drills developed by Paderborn University[30]
1.5 英国Magna Parva公司
面向未来在火星上实现次表层样品取芯任务,英国Magna Parva公司和欧空局于2006至2009年合作开发了一套直驱式超声波钻探器(Breadboard-Ultrasonic Drill Tools, BB UDTs)和一套回转冲击式超声波钻探器(Engineering Model Ultrasonic Drill Tools, EM UDTs)[32]。研究了BB UDTs的三种安装方式:在机械节面处的无约束、固定约束和弹性约束。钻进试验表明,通过弹簧连接放开自由度的弹性约束可以获得良好的钻进效果。同时,还发现在钻具与钻进介质相互作用表面存在颗粒介质时会降低钻进速率,以及冰块的局部融化会增加钻进效率。
在BB UDTs的基础上研制了能够满足火星探测任务需求和组装性能较好的工程样机EM UDTs。EM UDTs的电磁电机与超声波钻探器同轴布置,通过电机转轴与切削刃的柱塞连接实现钻具回转。切削刃的柱塞在活塞缸和记忆合金封闭环的作用下可以沿钻机轴向运动,有助于实现钻探器的钻孔、打磨、取芯等多种功能。
图5 UDTs概念演示样机及工程样机[32]Fig.5 Concept demonstrator and engineering model UDTs[32]
1.6 中国有关科研机构
国内关于超声波钻探器的研究主要集中在高等院校,以冲击式和回转冲击式的钻探器研究为主。2008年,南京航空航天大学的郭俊杰等[33]率先开展了超声波钻探器的研究,基于岩石破碎机理提出了一种新型的冲击式超声波钻探器。2010年,南京航空航天大学的杨康等[34]研制了适应温度-40 ℃~80 ℃的单晶压电陶瓷(PMNT)驱动的冲击式超声波钻探器并进行了高低温试验。2015年,中国地质大学梁彩红等[35]提出了采用解耦的方式将钻探器的动力学分析简化为集中力对连续柱激励共振响应求解的新方法。2016年,太原理工大学的毕亚兰等[36]借助仿真和实验方法获得了自由质量块质量和活动空间对超声波钻探器钻速的影响。以上机构研制的钻探器均为冲击式超声波钻探器,变幅杆与钻杆之间忽略了恢复弹簧而采用螺纹连接,且具有相似的结构与性能特点。虽然对超声波钻探器在性能提升、模型改进和环境适应性方面均有涉猎,却存在研究的延续性不足问题,分别仅提出了一代钻探器样机。
2012年,哈尔滨工业大学与中国空间技术研究院合作开展了基于超声波钻探器面向地外天体钻探采样的研究。针对超声波钻探器的作动方式优化和钻进速度提升做了大量工作。2017年,全齐全等[37-38]提出了两种由单压电陶瓷叠堆两端的纵振能量分别驱动钻具做冲击运动与回转运动的超声波钻探器(Rotary-percussive ultrasonic drills, RPUD),如图6所示。钻压力5 N、功耗100 W的RPUD,在75 MPa的砂岩上实现了40 mm/min的钻进速度,是目前为止所有相关科研机构中钻速最快的超声波钻探器。超声波钻探器的研究虽然在国内已经兴起多年,但是还没有得到更广泛的研究与应用,实验研究也处在模拟空间验证阶段,且提升钻速和探究空间适应性仍然是未来需要深入研究的方向。

图6 哈尔滨工业大学研制的回转冲击式超声波钻探器[37-38]Fig.6 Rotary-percussive ultrasonic drills proposed by HIT[37-38]
2 超声波钻探器的振动特性研究
结合有限元仿真和数值方法能够定量分析超声波钻探器的振动特征,评估压电换能器在不同应用环境中的设计性能,优化应力波在钻具组件间的传递效率。该仿真方法有助于描述和分析自由质量块碰撞过程中出现的非线性现象,探索钻杆碎岩的超声波/声波作用机理,实现对压电换能器和钻具组件的参数优选。
2.1 压电换能器模型的研究
压电换能器是超声波钻探器的动力来源,由夹心式压电振子和变幅杆组成,在一阶纵振模态的超声频激励下,形成驻波共振并在变幅杆前端端面处达到振幅最大。根据压电换能器的仿真结果表明,在夹心式压电振子确定的情况下,变幅杆对换能器的振动特性具有重要的影响:变幅杆的结构设计与材料性能影响着换能器的谐振频率、应变增幅以及驱动形式。文献[39]发现增加变幅杆前端直径可以实现在不降低有效相互作用质量的情况下增加换能器的振幅,基于此提出了狗骨型变幅杆。文献[40]研究了模态退化型变幅杆,改变了压电换能器纯冲击的驱动形式,实现了超声波钻探器的纵扭复合运动。同时,传统的变幅杆仍具有不可克服的缺点,比如在某些应用中希望降低谐振频率就需要增加变幅杆的长度至米数级,过长的变幅杆在应用中并不切合实际,并且由于变幅杆直径比的要求,势必导致变幅杆加工过程中的原材料和时间上的浪费。为了克服传统变幅杆的缺点,文献[41]提出了折叠、平面折叠和翻转构型的三种新型变幅杆。通过比较三种新型变幅杆发现翻转型变幅杆综合性能较好,在保持换能器性能的同时缩短了传统变幅杆的长度。
对压电换能器仿真模型的研究结果表明,基于一维压电材料波动方程演化的梅森等效电路模型可以简化波动方程的计算过程,有利于求解尺寸规则换能器的振动响应和确定设计参数。文献[14]通过对比梅森等效电路模型和ANSYS软件求解的换能器响应,优化了梅森等效电路模型。文献[42]为消除梅森模型中变压器顶端与声学传输线节点之间的电路元件提出了KLM模型,进一步简化了梅森等效电路模型。基于有限单元法和经典等效电路推导的FEM等效电路模型[43]是将有限元方程转换为模态方程后对模态方程进行等效变换建立的,考虑了驱动电源与换能器的相互作用,可以方便求解尺寸不规则的换能器在无负载和有负载情况下的位移、振速、阻抗以及功率。有限单元法对压电材料建模所需的机电耦合单元通过ANSYS软件可以方便获得。ANSYS软件对等效电路模型起到补充作用,可以体现换能器更多的工程设计细节,在确定节面、参数调整、确定全频响应和获得应力分布方面具有突出的优点。文献[43]将压电换能器模型进一步简化为由质量-弹簧-阻尼系统表示的集中质量模型,细化了变幅杆前端与负载作用的有效质量范围。文献[44]基于力-电-声类比方法,建立了模态退化型压电换能器的声阻抗网络模型,可以对换能器声阻抗和频率对应关系进行研究。总体来说,压电换能器模型的研究已经相对成熟,在构型优化和模型细化方面已经具备了系统的研究方法。

图7 FEM等效电路模型[43]Fig.7 FEM-equivalent circuit model[43]
2.2 超声波钻探器集成模型的研究
超声波钻探器的集成模型是耦合压电换能器模型对钻具组件和被钻介质之间相互作用的动力学建模。考虑直驱式和冲击式超声波钻探器的结构不同,将集成模型的建立分为两类进行研究。由于回转冲击式超声波钻探器是由直驱式和冲击式超声波钻探器发展而来,其集成模型的建立依据回转驱动形式不同分别对应于直驱式和冲击式的超声波钻探器。直驱式超声波钻探器的钻杆是压电换能器波长的一部分,钻杆传递给被钻介质的振动频率与压电换能器的驱动频率相同,因此直驱式超声波钻探器的集成模型可以参考压电换能器模型的建立方法。
在冲击式超声波钻探器中引入的自由质量块导致钻探器的集成模型增加了两个相互作用的接触面:变幅杆与自由质量块的相互作用、自由质量块与钻杆的相互作用,使得集成模型建立变得复杂[45]。一般需要分别建立各部件的相互作用模型,然后将各部分模型进行耦合。Bar-Cohen等[46]结合动量守恒和能量守恒提出了简单碰撞模型,验证了自由质量块与换能器碰撞运动的简单作用机理。Bao等[47]考虑了换能器碰撞运动的有效质量,利用有限单元法获得了自由质量块与换能器碰撞的准确接触时间,并采用集中质量法简化了有限元模型。Li等[48]提出了钻探器整体的质量-弹簧-阻尼动力学模型,相比文献[49],在二自由度的压电换能器模型中增加了驱动电源参数,同时将Kelvin-voigt模型用于钻杆与被钻介质相互作用的仿真。文献[50]提出一种考虑钻杆振动影响时自由质量块对钻杆的纵向冲击力的分析方法。文献[51]利用ANSYS软件建立了钻杆与被钻介质的相互作用模型,对比了实心钻杆与空心钻杆在被钻介质上的应力分布。综上分析,超声波钻探器集成模型的研究还大多集中于钻探器本身,而关于钻探器与被钻介质相互作用的研究较少。针对钻杆的不同运动形式,详细研究与被钻介质之间的作用机理并考虑空间环境因素对反馈钻探器设计和探明超声作用的碎岩和取芯机理具有重大意义。

图8 钻进岩石前的RPUD振动模型[45]Fig.8 RPUD vibration model before rockdrilling[45]
3 超声波钻探器的控制及驱动电源研究
目前驱动电源研究以钻探器自身的谐振控制为主,同时考虑了钻探环境因素的变化。自身谐振控制主要是通过自动频率追踪系统与恒振幅系统或恒功率系统结合的控制方法实现[52]。JPL开发了一种能够安装在Auto-Gopher-Ⅱ内部并能使用总线驱动电压且适应温度在100 ℃左右的驱动电源[53],具有应对环境温度、压力和机械边界条件变化引起的钻探器谐振频率变化的能力。该驱动电源通过实时监测钻探器的功率进行频率调整,利用霍尔电流传感器测量换能器的电流作为控制换能器振幅的参数,采用低侧电流感知电阻器测量换能器传递到钻杆和岩石的真实功率。文献[16]还提出一种高压线路快速可复位熔断器的电路设计方案以防止驱动电源故障对主系统高电压的影响。格拉斯哥大学采用P100控制单元控制驱动电源的输出电压和输出电流同相,从而使钻探器恒振幅稳定工作。在驱动程序的负反馈设计中,讨论了三种反馈参数对控制精度的影响:基于换能器前端振幅的机械反馈、基于压电陶瓷电流的电流反馈和基于换能器电流与功耗的功率反馈。俄罗斯比斯克超声技术中心采用自动频率追踪技术将驱动电源输出功率与环境变化建立自适应的对应关系,研制了一种随钻探器钻进深度增加和钻进介质机械参数改变自动调整输出功率以维持钻进速率的驱动电源。哈尔滨工业大学针对压电换能器与超声波钻探器驱动特性的差异性,提出采用D类放大器设计驱动电路并将最大电流法、自动追频技术和恒振幅控制方法结合,设计了适用于冲击式超声波钻探器的驱动电源[54]。恒振幅控制由降压式变换电路(Buck电路)控制输出电流的恒定实现。

图9 JPL研制的驱动电源控制策略[53]Fig.9 Drive power control strategy developed by JPL[53]
此外值得注意的是,由于自由质量块的存在和钻进介质的改变使钻探器在钻进过程中的幅频特性呈现不稳定和多值对应关系,控制换能器工作的自动频率追踪技术不完全适用于高品质因数的谐振系统,而钻探器的幅相特性在钻进过程中表现稳定且不受负载的干扰,因此英国Magna Parva公司舍弃了自动频率追踪技术,只考虑保证驱动电源的输出电压和输出电流同相的方式使钻探器工作在谐振状态。所研制的驱动电源采用了符合空间标准的电子元器件,并将元器件的总数量简化到72个。结合上述分析,未来在研制针对空间一般性场合的超声波钻探器驱动电源时,除了钻探器自身谐振控制以外,基于未知钻进对象在线辨识的全流程闭环控制算法以实现钻进参数自主调整方面仍需重点关注。钻进对象在线辨识的全流程闭环控制是实现超声波钻探器利用自身声呐优势实现智能钻探的前提。
4 超声波钻探器地外天体应用的探索研究
由于太阳系星体环境的多样化,不同星体的采样任务将对超声波钻探器提出不同的设计指标,要求钻探器在适应不同星体环境的同时获得理想的科学样品。USDC是超声波钻探器系列样机的设计原型,其具备较完善的理论模型与结构设计方法支持不同应用样机的设计开发。基于USDC的通用功能,学者们探索了多种结构与功能的超声波钻探器系列样机以适应不同环境下的采样探测任务,包括可以完成钻孔、取芯、锚固、打磨的超声波装置和辅助选点探测与原位分析的智能型超声波钻探器。
4.1 钻进取样
基于USDC开发的新型超声波装置保持了低钻压力、低功耗、碎岩速度快与耐温范围宽的优点,在适应星体地形、深度钻取和次表层取芯方面具有突出优势。
进行星体表面采样工作之前,首先清除岩石表面的风化层并暴露出岩石的原始表面,可以帮助探测器获得更加有效的科学信息。Bar-Cohen等[55]开发了一种由翻转型换能器和齿形打磨头组合而成的超声波打磨装置(Ultrasonic rock abrasion tool,URAT),利用超声波工作机理实现了模拟岩石风化层的快速去除。有科学家提出,探测星球上峡谷的侧壁可能会获得新的岩石矿物信息或天体生物学信息[56]。为了实现探测器在峡谷的侧壁等一些苛刻环境下行走和保持固定,Badescu等[57]提出了超声波锚固装置(STAR-USDC)。锚固装置由四个超声波钻分别搭载在探测器的四足末端组成。锚固所用的超声波钻利用双自由质量块结构可以实现钻体的自动回收并避免卡钻。火星、月球和木卫二等天体的未来探测任务提出获取地表深层样品的要求,以更好的研究地外天体的地质物理性质和生物学信息。对星体内部存在的冰层,Bar-Cohen等[15]提出Ultrasonic/Sonic Gopher装置,该装置采用循环取芯的方式,钻头内部空间决定了每段冰芯的长度。同时低导热性钻头和空载循环驱动两种方式避免了钻头发热融化冰层导致的卡钻问题。试验在-60 ℃模拟环境中进行,钻取深度达到1.76 m。为了提高钻进深度与钻进效率,研制了Auto-Gopher系列的钻探器。室外测试实现了在石灰岩地质中7.52 m的取芯深度[53]。此外,文献[58]还开发了多种可更换钻头的超声波钻探器,以实现多种形状样芯与岩屑粉末的收集。文献[59]研究了不同压电材料制作的USDC采样器对500 ℃高温的适应性。除此,还尚无高低温环境对超声波钻探器样机性能影响的文献研究。

图10 Auto-Gopher-Ⅱ现场试验[53]Fig.10 The field test of the Auto-Gopher-II[53]
4.2 智能钻探
USDC不仅可以实现不同样品的钻进取芯,还可以作为传感装置辅助探测器选择合适的采样点和实现样品的原位分析。研究者们基于USDC具有的声呐功能提出了智能型超声波钻探器的概念[7]。
钻探器自身具有的声源组件可以作为声纳的信息源。在钻探器未接触星体表面时,钻探器可同时作为发射器和接收器产生应力波感应到星体表面,通过分析返回波数据能够获得星体地质分层结构、力学性质和地质洞穴存在的信息等[60]。钻探器钻进之前的地质信息探测可以帮助选择更有探测价值的样品区域、节约探测器的能源。当钻探器接触星体表面时,钻杆冲击被钻对象使钻探器的阻抗发生变化[61]。通过检测钻探器的谐振频率与阻抗值变化可以获得介质的刚度等力学信息。将探测的信息与实验测得的波速、频谱和阻抗数据对应起来构建数据库,可为后期研究星体样品识别的鲁棒控制算法提供基础。
根据USDC的纵振模态特征,可以在钻头处安装传感器实现在钻进取芯过程中对样品的原位分析。原位分析通过对样品的实时检测可以避免样品采集后在保存过程导致的交叉污染造成科学信息不准确。可以选择的传感器有:热电偶、RF接收器、涡流装置、声学传感器、介电特性传感器,以及一些光纤传感装置。Blake等[62]对USDC钻取样品的成分保持性进行了研究。经过Horiba CAPA-500粒度分析仪和CheMin XRD/XRF光谱仪分析表明,USDC钻进过程产生的粉末的粒度和相位谱组成与在实验室使用研磨机制备的粉末粒度和相位谱组成相同,这支持了USDC对样品原位分析的可能性。

图11 开发的智能型USDC[7]Fig.11 Developed smart USDC[7]
5 结论与展望
对比分析国内外各科研机构研制的超声波钻探器可知,针对不同类型的超声波钻探器,在理论分析、样机研制和实验研究方面均积累了一定的基础,尤其以回转冲击式超声波钻探器为主是未来深空探测任务中优势突出、可工程实现的钻探平台之一。针对超声波钻探器的研究与应用,提出如下建议:
其次,可以举一些优秀的“阿姨”的例子,展示给她们看,这个职业可以到达的高度和状态,为阿姨树立学习的榜样。可以将国内外家政服务人员的学习和教育经历展示给阿姨看,英国、菲律宾等家政培训课程和学员学习情况,都可介绍给阿姨看,目的是希望阿姨认识到,这个工作不像她们想象的那样简单,有很多方面可以做得更好,但必须经过艰苦的学习和自我改变。
1)依据不同星体的探测任务选择超声波钻探器。由于深空作业环境的限制,选择钻进效率优于直驱式类型的冲击式和回转冲击式超声波钻探器具有较高的实用价值。针对样品取芯和快速钻进等对钻进速率要求较高的任务,选择回转冲击式超声波钻探器,回转运动在促进排屑和提高钻进速率方面优势明显;针对风化层清除、无损探测和样品原位分析等对钻进速率要求不高的任务,选择冲击式超声波钻探器可以简化钻探平台的结构。
2)研究回转冲击式超声波钻探器的结构设计。目前,回转冲击式超声波钻探器的回转运动大多是由电磁电机激励产生,这增加了钻探器的质量和结构复杂程度。为了进一步集成回转冲击式超声波钻探器,应着重研究由压电换能器同时驱动钻杆做冲击运动和回转运动,并探明压电换能器构型参数对纵扭转换比的影响规律和能量传递特性。
3)研究超声波钻探器回转冲击作用下的碎岩机理。回转运动的引入使钻杆对岩石单纯的纵向冲击运动变为回转-冲击复合运动,导致钻杆在岩石钻进过程中的接触状态与边界条件复杂化。阐明超声波钻探器回转冲击作用下的碎岩机理,并同时获得覆盖地面岩石所有可钻性等级的样本,以构建钻进规程专家库都是在未来钻探应用中亟需解决的问题。
4)构建钻探器的空间环境自适应控制方法。超声波钻探器对空间环境的适应性规律还不清晰,除真空、高低温外,还需考虑强酸、宇宙辐照等因素的影响。重点研究空间环境因素与钻探器相耦合的集成模型,同时结合基于支持向量机建立真空高低温环境下岩石的可钻性辨识模型,形成能够主动适应环境的闭环控制算法,将为进一步的超声波钻探器空间应用奠定基础。