基于驾驶风格识别的AEB控制策略*
2021-05-24吕凯光李旋韩天园乔洁刘永涛
吕凯光 李旋 韩天园 乔洁 刘永涛
(长安大学,西安 710064)
主题词:驾驶风格 AEB控制策略 安全距离模型 联合仿真
1 前言
根据美国高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)的研究报告,自动紧急制动(Autonomous Emergency Brake,AEB)系统可有效避免约38%因人为操纵不当而造成的汽车追尾事故,交通事故率降低27%[1]。目前,基于安全距离、预碰撞时间的AEB控制策略日趋成熟,但是在实际应用中避撞成功率仍比较低。张勇刚[2]认为没有考虑驾驶员个体差异、车辆制动性能差异和交通路况因素等建立的控制策略模型处于理想条件,很容易造成AEB系统的误制动与误报警。何仁[3]研究发现目前的AEB控制策略较为保守,保证了一定的安全性,但影响了驾驶员的舒适性,仍然需要更加灵活的避撞方式[4]来提高驾驶员的驾驶舒适性和行车安全性。
人为因素是影响驾驶行为和行车安全的主导性因素,驾驶员是人-车-路-环境系统中最复杂的部分。因此,研究基于不同驾驶员特性的AEB控制策略具有重要的现实意义。刘永涛[5]将驾驶员特性分为相对稳定的静态特性和相对不稳定的动态特性,分析了其对AEB控制策略的影响。Eben[6]提出了一种可以适应不同驾驶员反应时间与驾驶行为的碰撞预警算法,在一定程度上能满足驾驶员的驾驶习惯。裴晓飞[7]通过统计分析驾驶员避撞行为中的反应时间和制动减速度,提出了碰撞时间余量的评价指标,并设计了适用于不同驾驶员特性的分级预警和避撞算法。姜顺明[8]引入驾驶状态识别系数,将驾驶状态分为激进型、标准型和保守型3类,并将其用于最小安全距离修正,提出一种基于驾驶状态识别的AEB控制策略。郑刚[9]利用正交实验法和聚类分析法对不同驾驶员进行分析,拟合了驾驶员反应时间与车速的关系,修正了预警和制动阈值。
由于影响驾驶员特性的因素较多,上述对驾驶员特性的研究大多从驾驶员反应时间入手,缺乏对驾驶风格和驾驶状态的研究,且未定量说明驾驶风格和驾驶状态的判断依据与分类界限。针对以上问题,本文根据AEB危险场景下的驾驶员反应时间和情境风险度评价得分,提出驾驶风格识别系数的评价指标,将驾驶员分为3种风险感知类型,即谨慎型、普通型和激进型,在此基础上基于不同驾驶风格修正AEB控制策略。
2 基于情境风险度评价得分的驾驶风格识别系数
2.1 驾驶风格量化指标
情境风险度用来表示危险驾驶情境中存在驾驶风险的大小[10]。情境风险度评价得分(Score of Situational Risk Assessment,SSRA)越低,则驾驶情境存在的驾驶风险越大,驾驶员的驾驶风格越激进。在单个场景的情境风险度评价得分中,0表示无风险,1~5风险程度依次上升。情境风险度分为主观情境风险度和客观情境风险度。主观情境风险度与驾驶员相关,通过模拟危险驾驶情境下的试验得到;客观情境风险度是情境固有的风险度,由一定数量的专家型驾驶员测试得到,即专家型驾驶员主观情境风险度评价得分的平均值。驾驶风格识别系数β表征在风险驾驶情境中驾驶员对客观风险的主观心理感受,反映了驾驶员的驾驶风格,β值越大,驾驶风格越谨慎:
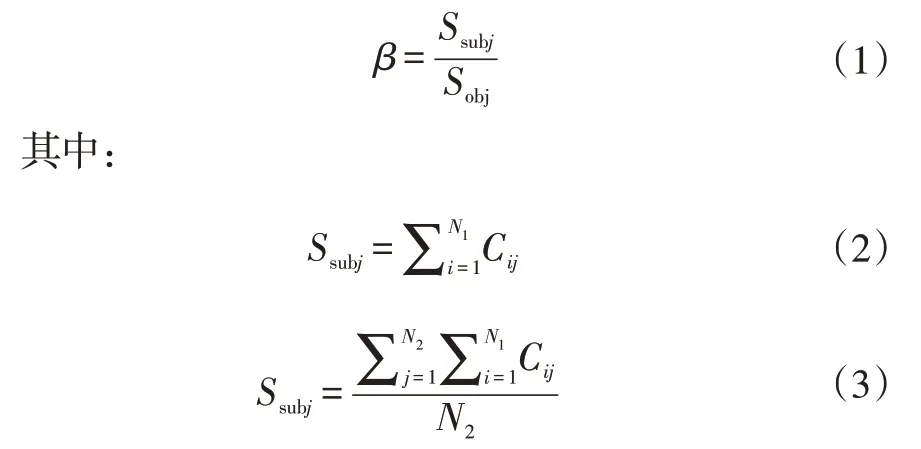
式中,Ssubj为第j名驾驶员的主观情境风险度评价得分;Sobj为客观情境风险度评价得分;N1为危险情境数量;N2为专家型驾驶员人数;Cij为第j名驾驶员对第i个主观情境的风险度评价得分。
2.2 试验设计与数据分析
试验对象包括普通型驾驶员和专家型驾驶员。选取100 名年龄25~50 岁,有机动车驾驶证且驾龄超过2年的驾驶员作为普通型驾驶员,其中男性和女性各50名;选取道路专家、交通警察以及经验丰富的职业驾驶员共5名作为专家型驾驶员。
试验平台为组装的三联屏驾驶模拟器,如图1 所示,显示系统为1 个三联屏显示器,数据采集系统能实时同步采集驾驶员模拟驾驶时对转向盘、制动踏板、油门踏板等操纵部件的操作数据。

图1 驾驶模拟器试验平台
本试验采用AEB系统可能触发的部分危险工况作为典型测试场景,包含3大类,每类场景包含5个视频,具体场景描述如表1所示,基于危险工况测试场景和驾驶模拟器完成试验软、硬件搭建。
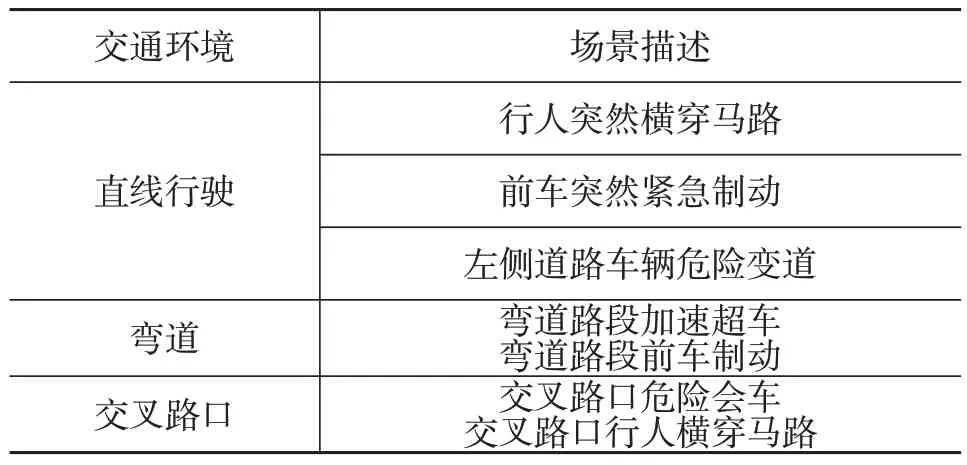
表1 AEB典型危险工况测试部分场景
被试驾驶员在了解驾驶模拟器的基本操作,进行多次重复练习后,进行正式测试。在危险工况视频播放过程中,通过驾驶模拟器采集驾驶员反应时间(松开油门踏板至踩下制动踏板的时间间隔),视频播放结束后,被试驾驶员进行情境风险度评分,之后进行下一个场景测试,重复上述过程。
基于驾驶模拟器共采集到100例有效样本,得到相应的驾驶员的反应时间,计算出驾驶员的情境风险度评价得分和驾驶风格识别系数,并拟合驾驶员反应时间与驾驶风格识别系数的关系曲线,如图2 所示。可以看出,驾驶风格比较激进的驾驶员反应时间较短,驾驶员反应时间与驾驶风格识别系数基本呈正相关关系。
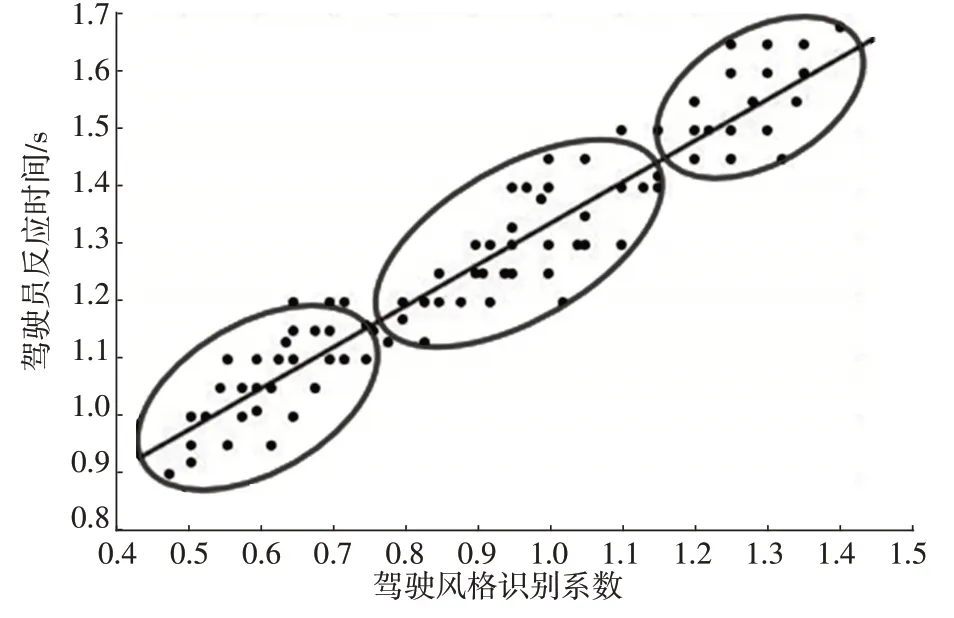
图2 驾驶员反应时间与驾驶风格识别系数的关系
由于AEB 系统与驾驶员的人机互动性,只有系统性能与驾驶员的自身特点相符,才能保证系统在不干扰驾驶员正常操作的前提下尽可能提高驾驶能力。在本试验的样本数量下可以看出,虽然由于个性化因素导致单个驾驶员的反应时间有差异,但整体来看,驾驶员行为特性呈现一定的人群聚类规律,见图2。在此基础上进行驾驶风格的划分,0.8≤β<1.2 时判定驾驶风格为普通型,β<0.8 时判定为激进型,β≥1.2 时判定为谨慎型。且β值越大,驾驶风格越谨慎。
根据聚类后不同驾驶风格驾驶员的试验数据,绘制如图3 所示的驾驶员风格类型与平均反应时间的关系。从图3 中可以看出,激进型、普通型以及谨慎型驾驶员的平均反应时间依次升高,且聚类后的驾驶员驾驶风格与反应时间仍存在相关线性关系。
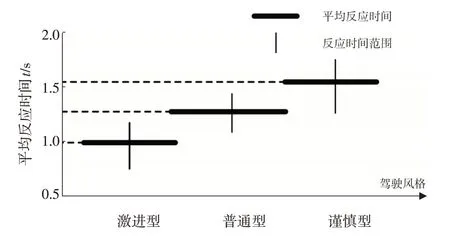
图3 驾驶员风格类型与平均反应时间关系
3 基于不同驾驶员驾驶风格的AEB控制策略
3.1 基于车辆运动学的安全距离模型
车辆行驶过程中,设自车与前车的速度分别为v1、v2,相对速度为vrel,两车相对距离为d。当AEB系统检测到相对距离d到达临界报警距离dw时,AEB系统通过声音、图像等进行预警;当相对距离d到达临界制动距离dbr时,AEB系统开始进行紧急制动,紧急制动过程中两车行驶距离分别为d1、d2,此时车辆的最小安全距离为d0=d2+dbr-d1。车辆制动过程中安全距离模型如图4所示。
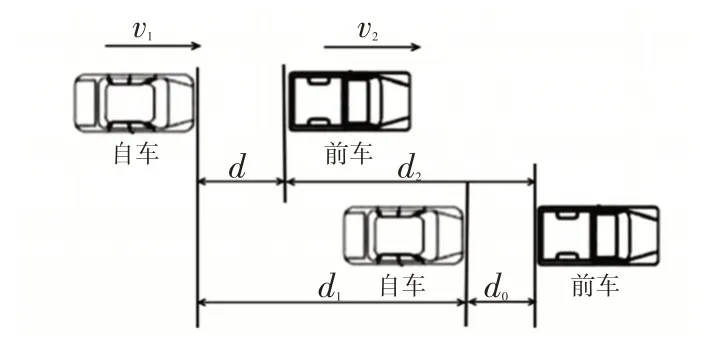
图4 安全距离模型
根据运动学公式,结合马自达(Mazda)[11]、本田(Honda)[12]安全距离控制策略,AEB 控制策略的制动安全距离和预警安全距离模型分别为:
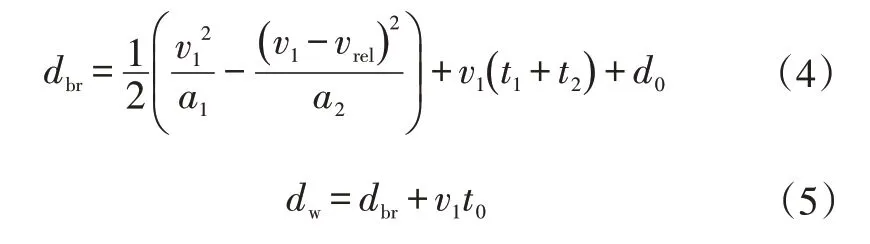
式中,a1、a2分别为自车和前车的最大制动减速度;t1、t2分别为系统延迟时间和驾驶员反应时间;t0为驾驶员允许的预警最小安全时间,即时间系数。
3.2 基于驾驶风格识别系数的安全距离修正模型
目前采用固定驾驶员反应时间和最小安全距离参数建立的汽车防撞控制模型,对于驾驶风格比较激进的驾驶员来说安全时间和安全距离过于保守,AEB系统制动频繁,影响驾驶员的操作和驾驶体验,对于驾驶风格比较谨慎的驾驶员来说安全时间和安全距离过于激进,AEB系统响应迟缓,不能保证行车安全。
AEB控制策略与个性化的驾驶员反应时间、时变化的路面附着系数以及差异化的车辆制动时延等因素密切相关。根据国内外相关研究内容[13]和本文设置的仿真环境(水平良好路面),在保证相对安全性与舒适性的条件下,对一些与驾驶员特性不相关参数进行了理想化处理:路面附着系数取极大值0.8,即自车和目标车的最大制动减速度a1=a2=7.8 m/s2,取t1=0.2 s、t0=2.2 s。根据对国内外安全距离模型的研究,驾驶员反应时间一般取0.8~2.0 s,最小安全距离一般取2~5 m,上述参数是通过试验获得的简化经验参数,在控制策略中一般取某一固定值,不随实际情况而动态变化,很容易导致AEB系统在人-车-路-环境耦合状态下发生失效。考虑到不同驾驶风格驾驶员的个性化反应时间以及对制动结束后前、后车最小安全距离的心理预期,在设计新的制动与预警安全距离模型时应考虑到驾驶员的上述个性化需求,提高其驾驶舒适性和行车安全性。本文取t2=1.25 s,d0=3 m,并根据前文提出的驾驶风格识别系数β与驾驶员反应时间的关系以及不同驾驶风格驾驶员对最小安全距离的心理预期,对驾驶员反应时间、最小安全距离进行修正,提出基于不同驾驶员驾驶风格的AEB安全距离模型:
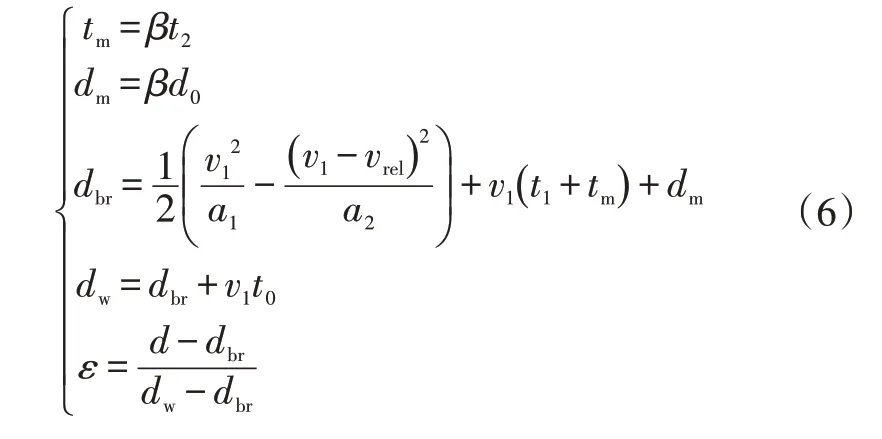
式中,tm、dm分别为修正后的驾驶员反应时间、最小安全距离;ε为危险系数。
根据文献[14]提出的危险系数概念,可以对驾驶危险状况进行评估,根据ε选择合适的制动减速度。部分制动时,为了保证人体的舒适性,制动减速度分别取0.4g和0.6g;全力制动时,为了保证车辆的安全性,制动减速度取最大值0.8g(取g=10 m/s2),如表2所示。

表2 不同危险系数下的制动减速度
4 AEB安全距离控制策略仿真与验证
为验证不同驾驶风格下的AEB 安全距离控制策略,利用Trucksim 与Simulink 进行联合仿真,其控制模块与执行逻辑如图5 所示。安全距离计算模块通过传感器获取前、后车的相对距离、相对速度等信息,计算出预警安全距离和制动安全距离;危险状况判断模块通过危险系数判断危险工况,决策出期望的车辆制动减速度;PID控制器模块选取PID控制器合适的比例、积分和微分参数值,将期望制动减速度转化为制动压力;制动力分配模块利用ABS逻辑门限调节轮缸压力[15],完成制动力分配,避免车轮抱死;车辆动力学模块通过自车的整车质量、轴距等固定参数以及路面的附着系数,得到实时状态下的车辆速度、轮速以及行驶位移等参数,建立车辆动力学模型。
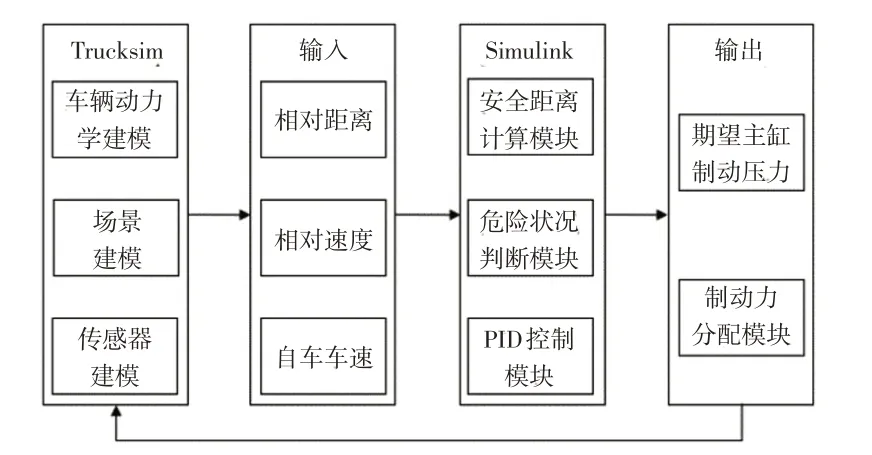
图5 联合仿真控制模块与执行逻辑
2018 年版的中国新车评价规程(China-New Car Assessment Programme,C-NCAP)的AEB 追尾(Car-to-Car Rear,CCR)测试包括前车静止(Car-to-Car Rear Stationary,CCRs)、前车运动(Car-to-Car Rear Moving,CCRm)和前车制动(Car-to-Car Rear Braking,CCRb)3种测试场景。本文分别选取谨慎型、普通型和激进型3种驾驶风格(驾驶风格识别系数分别取1.3、1.0和0.5)进行仿真验证。为简化测试流程,选取的测试工况分别为:
a.CCRs测试工况:目标车辆静止,自车以40 km/h的速度接近目标车辆,两车相距50 m;
b.CCRm测试工况:目标车辆以20 km/h的速度匀速行驶,自车以40 km/h的速度接近目标车辆,两车相距50 m。
c.CCRb测试工况:目标车辆和自车相距40 m,分别以50 km/h的速度行驶,目标车辆以6 m/s2的制动减速度制动。
3 种不同驾驶风格在前车静止、匀速及减速等3 种不同测试工况下的安全距离模型仿真结果如图6~图8和表3所示。
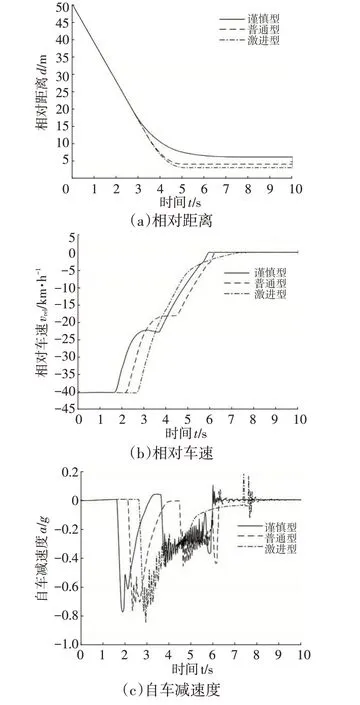
图6 CCRs测试工况仿真结果
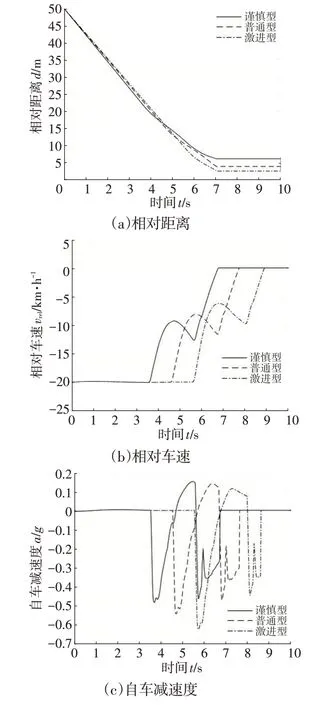
图7 CCRm测试工况仿真结果
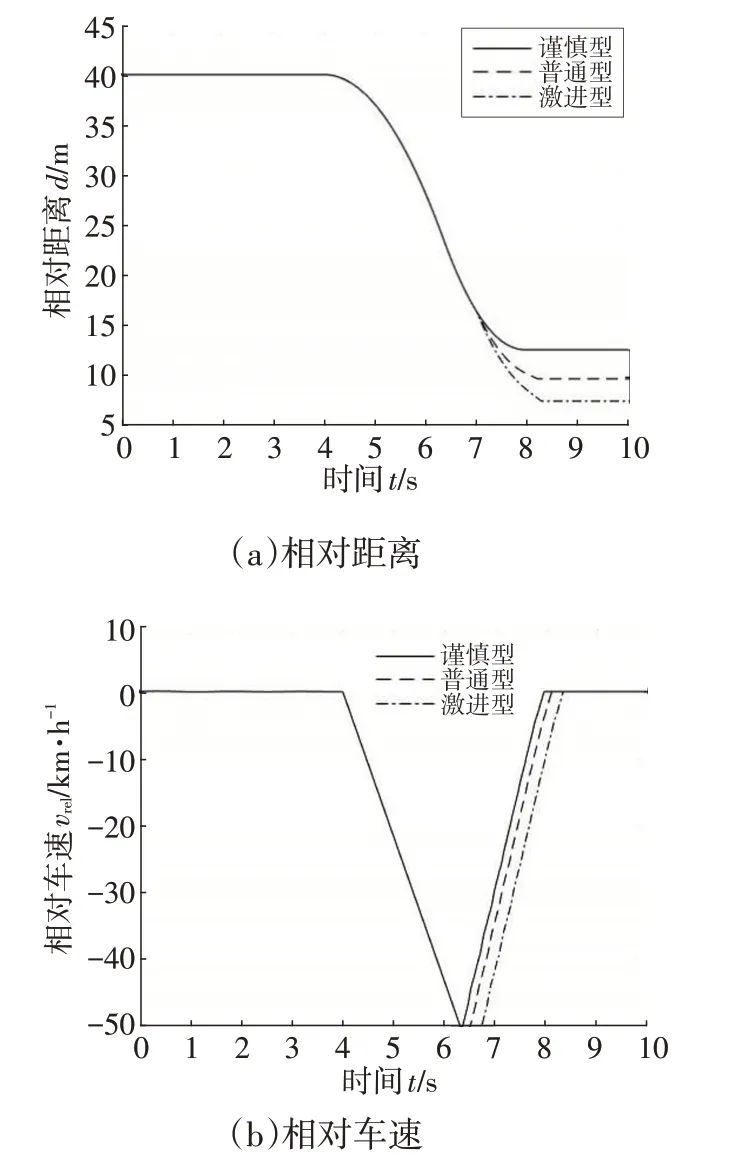
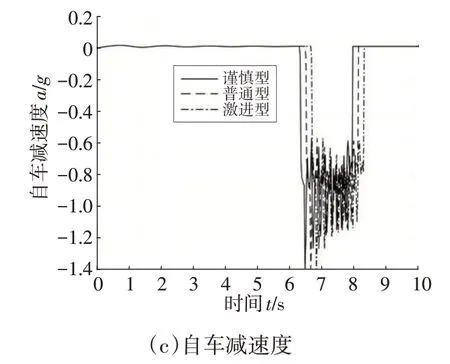
图8 CCRb测试工况仿真结果
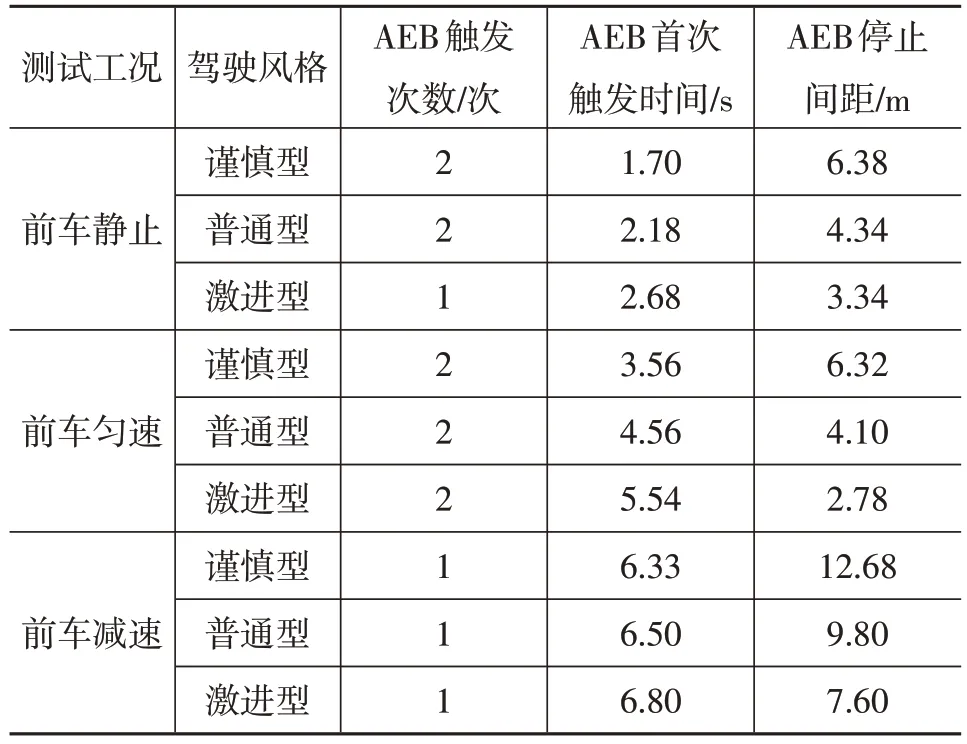
表3 测试工况仿真结果
由图6~图8 和表3 可以看出,在3 种测试工况下,AEB 系统的触发次数、触发时间、停止间距和制动减速度不尽相同。CCRb测试工况与CCRs和CCRm相比,制动减速度控制精度高,但车辆停止后的最小安全距离较大。总的来看,在3种测试工况中,谨慎型、普通型、激进型驾驶员的AEB系统触发时间和最小安全距离依次递增。根据表3中AEB的触发时间和停止间距可以看出,不同驾驶风格驾驶员对AEB系统的触发时间和最小安全距离的心理预期不同,基于驾驶风格识别的AEB控制策略从时间尺度和距离尺度2个方面修正和协调了临界制动时间和安全距离,在保证安全性的前提下,考虑了驾驶员的个性化需求,比较符合驾驶员的心理预期。
5 结束语
为考虑个性化的驾驶风格对AEB 控制策略的影响,本文通过引入驾驶风格识别系数,从时间尺度和距离尺度修正了AEB 安全距离模型,提出了一种基于不同驾驶员驾驶风格的AEB控制策略,得到以下结论:
a.谨慎型、普通型和激进型驾驶员对反应时间和最小安全距离具有不同的心理预期,激进型驾驶员与普通型、谨慎型驾驶员相比,所需要的安全距离和驾驶员反应时间更短。
b.基于不同驾驶风格的AEB 安全距离模型在保证安全性的前提下,有效提高了驾驶员的舒适性和对AEB系统的接受度。
本文只对修正的模型进行了仿真验证,没有开展实车试验,算法对于不同驾驶风格驾驶员的满意度以及实际应用推广还需进一步研究。
