永磁同步电机非线性自抗扰复合型控制策略研究
2021-05-23白晨光魏晓静杨建飞葛浩锐张永民
白晨光,魏晓静,邱 鑫,杨建飞,葛浩锐,金 振,张永民
(1.南京师范大学 电气与自动化工程学院,南京210046;2.中国电子科技集团公司第十四研究所,南京210039)
0 引 言
永磁同步电机(以下简称PMSM)是一个多变量、强耦合的非线性系统,而传统PI控制已经不能满足其高性能控制的要求。随着非线性控制理论的发展,多种先进的算法被应用到电机控制中[1⁃2],比如滑模变结构控制[3]、模糊控制、神经网络控制等,这些控制方法有的实现复杂,有的存在抖振问题,还有待进一步提高。自抗扰控制(以下简称ADRC)是近年来发展起来的新的非线性控制算法[4],其中的扩张状态观测器(以下简称ESO)能够对系统内外扰动进行估计补偿,大大提高系统的抗扰能力,且不依赖于系统数学模型,是整个ADRC的核心。
ADRC得到国内外学者的广泛关注和研究,文献[5]将线性ADRC应用在永磁电机调速系统中,虽然解决了ADRC参数多且难整定的问题,但是转速跟踪和抗扰动的误差收敛速度仍然难以令人满意。文献[4]将电流环省去,设计了二阶ADRC转速环,并采用PD+ESO的复合型控制策略,通过仿真说明了二阶ADRC具有更好的抗扰性。文献[6]采用非线性比例微分作为反馈控制律,结合ESO估计补偿扰动,实现了较好的误差收敛速度和较强的鲁棒性。文献[7]将模糊控制引入自抗扰控制器,利用其自适应推理估计了控制器参数,但是由于其算法复杂,运算量大,对处理器要求较高,实现起来比较困难。文献[11]采用SMC+ESO的复合型控制策略,与传统SMC相比,减小了系统的抖振,提高了抗扰性能。
早期的ADRC由于其非线性结构中的参数较多,整定较困难,运用并不广泛,之后美国克利夫兰州立大学的高志强教授将其中的ESO线性化,AD⁃RC的应用才逐渐广泛。但是线性化的ADRC在误差收敛速度方面明显弱于非线性的ADRC,因此可适度引入非线性结构,提高误差收敛速度。
在文献[4]的基础上,本文介绍了一种非线性误差状态反馈(以下简称NLESF)+ESO的复合型控制策略,将传统的线性反馈替换成更高效的非线性反馈,并保留了线性ESO参数整定较少的特点。将其应用到伺服系统转速环,利用ESO同时对转速和扰动进行观测,将观测的转速和扰动转矩分别作为反馈量和前馈补偿量,再经过NLESF输出控制量。该复合型控制能够兼顾系统的跟踪精度和抗扰性能,使系统具有更快的误差收敛速度和更强的抗扰性能。最后仿真验证了该控制的有效性。
1 传统转速环线性ADRC设计
1.1 PMSM数学模型
本文的研究对象是一台表贴式的PMSM,采用id=0的矢量控制方式,其中d,q坐标系下的状态方程:

式中:id,iq分别为定子电流d,q轴分量;uq为q轴电压分量;Rs为电机定子绕组相电阻;L为电机直交轴电感;ωe为转子电角度;ψf为转子磁链;ωm为电机机械角速度;p为极对数;J为转动惯量;TL为负载转矩;B为粘滞摩擦系数。
为简化控制器的设计,将电机角速度转换成转速,它们之间的转换关系如下:

将式(3)代入式(2)并进行标幺化处理,得:

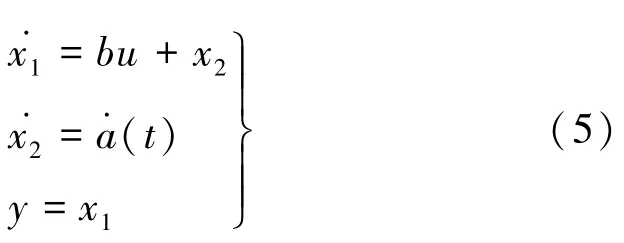
式中:nN为电机额定转速;KT为转矩系数;iqN为电机额定电流为控制量,a(t)为系统总扰动。
取电机转速n为状态变量x1,系统总扰动扩张为新的状态变量x2,y为系统输出,则系统状态方程变为:
1.2 二阶线性扩张状态观测器设计
结合ADRC理论对式(4)建立二阶线性扩张状态观测器:

式中:z1,z2分别为x1(转速),x2(扰动)的观测估计值。
该状态方程的特征多项式:

按照高志强教授的线性参数整定方法,该多项式形式应为(s+ω)2才能有比较好的稳定性和过渡过程,则:
式中:ω为观测器带宽;ωc为转速环系统带宽。
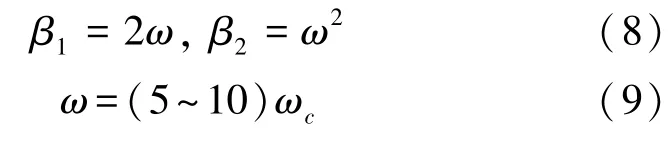
由式(5)、式(6)可得观测器误差状态方程:

式中:β1=2ω,β2=ω2。经Laplace变换得:

则由式(6)和式(10)可得各状态观测值:

可以看出,随着ω的增大,观测器收敛速度就越快。
1.3 线性状态误差反馈律设计
设转速跟踪误差es=n∗pu-npu,求其一阶导数得:

采用线性比例P反馈控制律得:

式中:kp为比例系数。
由式(13)、式(14)可得控制量:

其中,扰动量x2可由ESO观测结果替换为z3,则式(15)变为

考虑到实际系统需要电流限幅,则控制量:

用ESO观测得到的转速z1代替x1作为反馈可减小系统噪声。
图1和图2分别为传统的转速一阶自抗扰控制器结构和自抗扰系统框图。
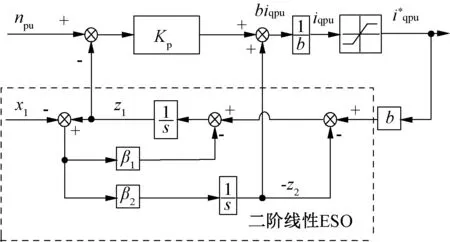
图1 转速环线性一阶自抗扰控制器结构框图
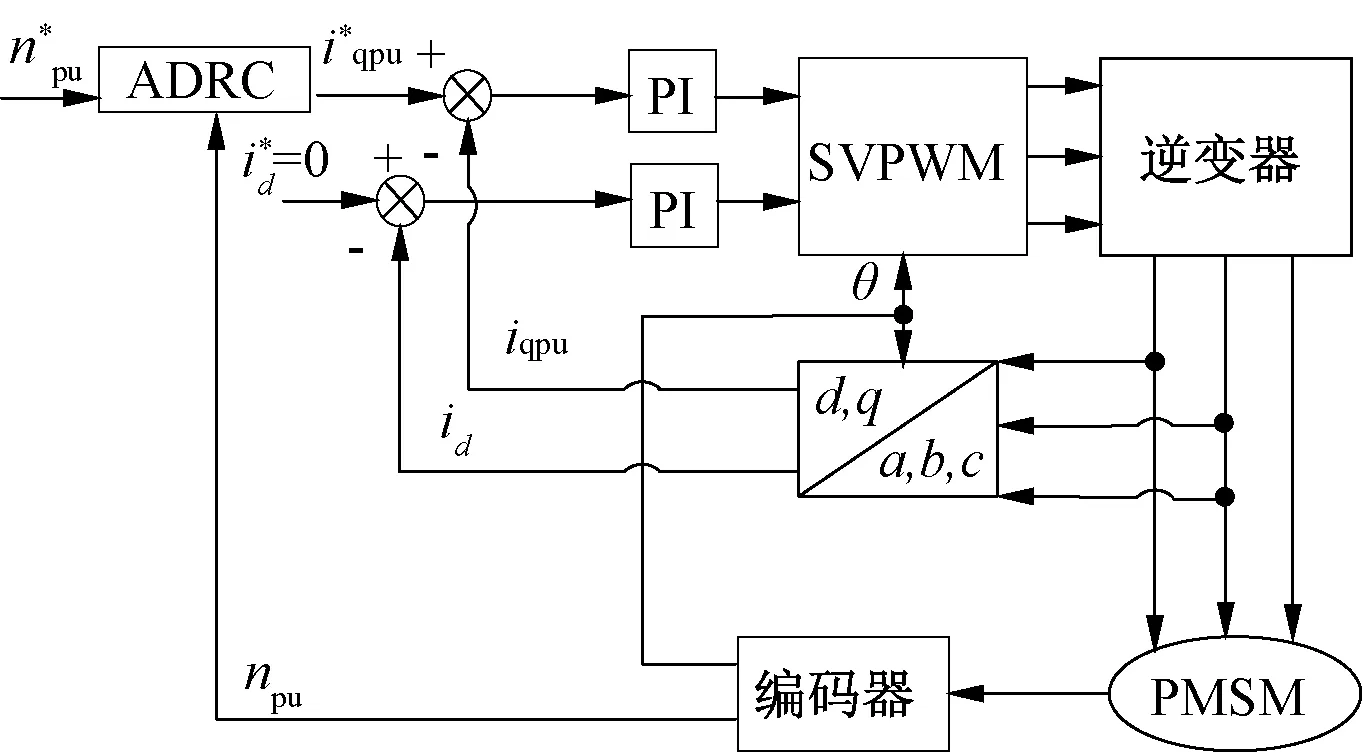
图2 转速环线性ADRC系统结构框图
由图1知,当kp为一定值时,由于采用线性反馈,误差时有这样的特点,大误差大增益,小误差小增益,这样取的控制量并不合理。而在非线性反馈中,选取合适非线性函数,可以使控制量具有小误差大增益,大误差小增益的特点,这种控制特点可以大大提高控制效果。
2 转速环非线性ADRC复合控制设计
2.1 非线性函数的分析
非线性函数是ADRC的重要组成部分,合适的非线性函数会使系统的效率有很大提高。下面分别介绍两种非线性函数fan(e,α)和fal(e,
α,δ)。
fan(e,α)是早期ADRC使用的非线性函数,它的表达式:

分别取α=0,0.25,0.5,1时,利用MATLAB进行仿真,利用图形直观分析其特点。
由图3可以看出,随着α的增加,函数的非线性程度是随之减弱的,且该函数在原点处不连续,在原点的导数为无穷大,因此该非线性函数在原点周围会呈现出高频抖动现象,基于该非线性函数设计的系统也会呈现高频抖动,抗干扰能力欠佳。

图3 α取不同值时的fan函数曲线
为了避免高频抖动现象,将fan(e,α)函数改造成fal(e,α,δ)函数,其表达式:

可以看出,fal(e,α,δ)多了一个变量δ,为了便于分析,采用控制变量,在以下两种情况下对该函数进行数值仿真。取δ=0.01保持不变,α=0,0.25,0.5,1时,分析α值对函数性能的影响,函数图如图4所示。取α=0.25保持不变,δ=0.01,0.05,0.1,0.2时,分析δ值对函数性能的影响,函数图如图5所示。

图4 α取不同值时的fal函数曲线

图5 δ取不同值时的fal函数曲线
从上面的仿真结果中可以看出,α值的作用和fan(e,α)一样,影响的是函数的非线性程度,α值越小,fal(e,α,δ)函数的非线性程度就越强,α值越大,fal(e,α,δ)函数的非线性程度就越弱。一般α的取值在0~1之间;而δ的值则是函数的线性区范围,和误差的范围有关。当δ取0时,fal(e,α,δ)函数就变为fan(e,α)函数,因此δ的值不宜取得过小。
采用fal(e,α,δ)的非线性误差状态反馈率能缓解fan(e,α)带来的高频抖动,并且具备小误差大增益,大误差小增益的优点。
2.2 非线性和线性状态反馈抗扰性能分析
设有一阶受控对象:

式中:x为状态变量;u为控制量;a(t)为总扰动。
对它进行线性反馈:

得闭环系统:

现取状态反馈式(21),为了使状态变量x,在扰动a(x,t)的作用下,尽快收敛到零。对式(22)两边同乘x,得:


将线性反馈替换成非线性反馈:

此时闭环系统:

同线性反馈的分析得:

而实际应用时,k>a(x,t),0<α<1,那么:

1
从上面的分析可知,当反馈增益k大于扰动a(x,t)得范围时,非线性反馈的效率远高于线性反馈,并且α幂次越小,效率就越高;由上一节分析,为了避免高频抖动,将非线性函数换成fal(e,
α,δ)。
2.3 非线性和线性状态反馈跟踪性能分析
由第一节中的式(13)、式(16)可得,线性反馈的误差状态方程:

则系统的稳态误差:

而引入非线性反馈后的控制量:

非线性反馈的误差状态方程:

则非线性反馈的稳态误差:

由式(28)、式(31)可知,非线性反馈误差是以指数衰减,远比线性反馈快得多,且α越小,误差衰减越快,稳态误差越小。
3 仿真分析
为了验证上述所提控制方法的控制效果,在MATLAB/Simulink环境中分别搭建了传统PI,P+ESO,NLESF+ESO三种PMSM双闭环调速系统模型,用来进行仿真验证和分析。
表1列出了仿真用PMSM的主要参数,其中,仿真步长为10μs,控制周期为100μs。

表1 电机参数
为了更好地对比三种控制方法下的电机性能,控制量应尽量保持一致。
仿真参数设置如下:额定转速nN=1 000 r/min,最大电流iqN=9 A,系数b=71.79,转速阶跃给定为1 000 r/min。电流内环仍然采用PI控制器,d,q轴参数一样均为Kip=1.8,Kii=10,限幅标幺值为±1。设置三种控制器参数,NLESF+ESO:α=0.5,δ=0.02,Kp=68,β1=10 000,β2=25 000 000;P+ESO:Kp=80,β1=10 000,β2=25 000 000;PI:Kp=1.2,Ki=80。转速限幅标幺值为±1。
为了方便测量跟踪性能和抗扰性能,分别做以下两组仿真实验:a)空载起动电机,在0.2 s时给定转速1 000 r/min,观测三种方式下的系统动态性能;b)空载起动电机,在0.96 s时突加5 N·m的负载,在1.2 s时卸载,观测三种方式下的系统动态性能。
为了使仿真和实际更加接近,在仿真中加入死区模块,死区时间设置为4μs。在转矩输出端加入滤波器,滤去纹波,方便图形观测对比。
图6、图7分别为空载时三种控制方法下的转矩动态响应波形和转速动态响应波形。
图6、图7可知,三种控制方法下的初始转矩最大值基本相同,为6 N·m左右,可知三种方式的控制量也基本相同。由转速波形分析知,传统PI存在超调,超调量为19%,调节时间为170 ms;而P+ESO和NLESF+ESO的控制结构下均无超调,调节时间分别为64 ms和25 ms。
由仿真结果可知,NLESF+ESO的结构相比于PI和P+ESO,调节时间分别缩短85%和61%。
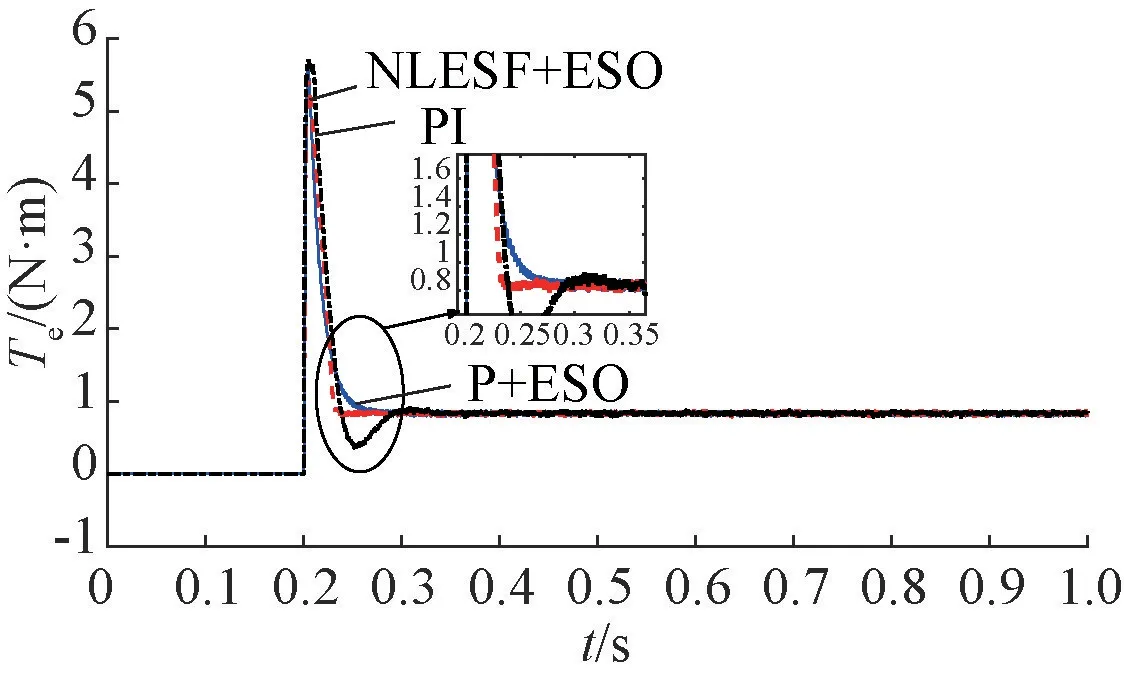
图6 转矩波形(空载)
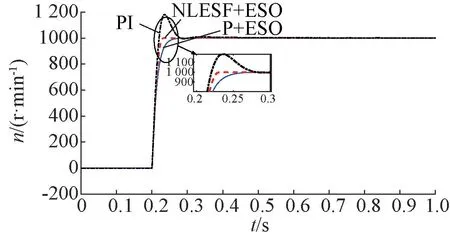
图7 转速阶跃响应波形(空载)
图8、图9分别为三种控制方法下加载和卸载额定转矩5 N·m时的转矩动态响应波形和转速动态响应波形。
由图8、图9可知,突加负载时,传统PI控制方式下的转速下降为260 r/min,恢复时间为100 ms;P+ESO控制方式下的转速下降为32 r/min,恢复时间为30 ms;NLESF+ESO的控制方法下的转速下降为15 r/min,恢复时间为10 ms。突卸负载时,传统PI控制方式下的转速上升为290 r/min,恢复时间为100 s;P+ESO控制方式下的转速上升为25 r/min,恢复时间为24 ms;NLESF+ESO的控制结构下的转速上升为12 r/min,恢复时间为5 ms。
由上述结果可知,加载、卸载时NLESF+ESO的结构相比于PI和P+ESO,转速跌落减少94%和53%;恢复时间分别缩短约90%和67%。由此可见,NLESF+ESO的复合型控制策略大大提升了系统跟踪精度和抗扰性能。
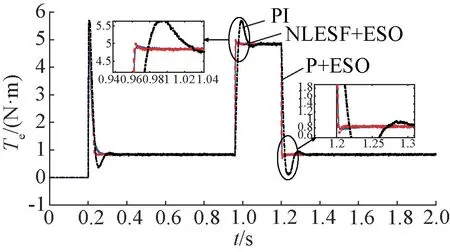
图8 转矩波形(带载,卸载)

图9 转速响应波形(带载,卸载)
4 结 语
在PMSM控制系统中,传统的PI控制无法兼顾跟踪性和抗扰性,而复合型的控制策略可以有效解决这个矛盾。本文在线性ADRC的基础上,引入非线性函数,搭建了NLESF+ESO的复合型结构,并对非线性函数的参数进行仿真分析,仿真对比了三种控制方式的性能优劣,可以得出如下结论:
1)在线性ADRC中引入非线性反馈,能大大提升误差收敛速度,进一步提高了跟踪进度,增强抗扰性能。
2)fan(e,α)函数是fal(e,α,δ)在δ=0时的特殊形式,fan(e,α)在零附近存在高频抖动,因此fal(e,α,δ)在取δ值时,避免取值过小。
