主动配电网馈线自动化动作效果评估方法
2021-05-21王秀茹韩少华王科龙
邱 冬, 王秀茹, 张 科, 刘 刚, 韩少华, 王科龙
(1.国网江苏省电力有限公司宿迁供电分公司,安徽 宿迁 223800; 2.上海金智晟东电力科技有限公司,上海 200000)
0 引 言
馈线自动化系统是配电网安全可靠、稳定运行的技术保障, 是建设智能配电网、实现能源互联网的基础。借助于快速发展的自动化技术、通信技术和物联网技术, 馈线自动化系统能够实现对馈线线路运行情况的实时监控以及终端信息的实时采集和处理[1-3]。在配电网故障时, 馈线自动化系统能够及时将现场故障信息上传至配网主站或就地型终端, 并自动隔离故障区域并恢复非故障区域的线路供电, 从而提高配电网供电可靠性[4-7]。
馈线自动化系统可靠性测试是其实用化运行的前提, 已有学者对这一问题开展研究。文[8]介绍了配电自动化系统中设备、主站的测试方法、测试内容、测试环境及功能规范。文[9]提出了一种在配电终端注入故障特性数据的终端注入测试法。文[10]对馈线自动化算法特点进行细致分析, 并提出计及通信故障、开关设备拒动、馈线运行方式改变等多种干扰因素影响的针对离散型软件算法可靠性的量化评价方法。文[11]建立了基于并行计算的馈线自动化仿真测试环境。文[12]提出了开关拒动、保护信号失真、通信通道障碍时提高馈线自动化系统可靠性的保障措施。文[13]基于贝叶斯分析方法, 在信息缺失情形下, 提出将故障信息与其他有关信息相融合的配电网容错故障诊断及故障恢复策略。
当前配电网技术快速发展, DG、柔性负载的接入引起网架结构、潮流分布变化, 使得原有馈线自动化系统的配置和整定计算变得更为复杂[14-17]。针对这一问题, 文[18]通过分析故障前后电流相角的变化, 提出了一种基于正序电流相角突变向量的配电网电流纵联方向保护方案。文[19]针对不同的馈线结构, 研究了适应性差动保护动作判据和整定原则, 并提出了基于故障数据的电流信息自同步方法。文[20]考虑在故障发生后, 综合利用备用联络线容量和DG的孤岛运行能力为非故障区域恢复供电, 提高配电网供电可靠性的方法。但上述文献均未对配电网中馈线自动化动作本身进行考虑, 文[21]提出了有源配电网的馈线自动化效果评价指标和方法, 但该方法对馈线自动化动作过程的描述过于简单。
基于以上所述, 本文研究了主动配电网馈线自动化动作效果评价方法。首先, 提出配电网馈线自动化过程中的负荷状态定义, 并分析了主动配电网中馈线自动化动作干扰因素。之后, 从馈线自动化动作过程和动作结果两个角度着手, 定义了7个定量评价指标, 并建立了主动配电网馈线自动化动作评估体系。在此基础上, 基于无失效测试法, 提出了主动配电网馈线自动化动作评估方法。最后, 以5站所双环网结构的馈线自动化系统测试为例, 验证了本文所提方法的有效性,该评价方法能有效鉴别馈线自动化动作过程中的拒动、误动情形,科学评价馈线自动化算法优劣及参数整定的合理性。
1 负荷状态定义及馈线自动化干扰因素
配电网发生故障后负荷状态转换如图1所示,当某处出现故障后,可通过配电终端上传的信息, 由配网主站的高级应用算法确定故障位置及故障类型, 并利用遥控功能操作现场开关的分合状态, 实现故障区域的隔离与非故障区域的恢复送电。考虑DG大规模配置的配电网, 故障时DG需先退出运行, 继而通过有源配电网的馈线自动化算法, 进行融合DG的配电网故障区域隔离与非故障区域的恢复送电。
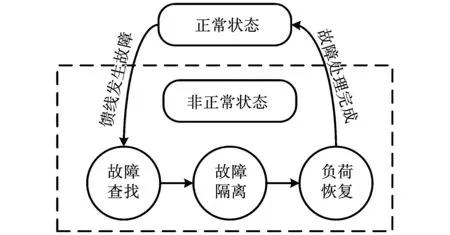
图1 状态转换模型Fig.1 State transition during the feeder automation process
1.1 馈线自动化过程中的负荷状态定义
以图2为例进行说明, 正常状态下, 负荷均为正常供电, ①~⑤之间负荷均可定义为“正常态”。当假定②与③之间发生故障时, 负荷转化为非正常状态, 此时馈线出口断路器和DG的自带保护均跳闸, 使得①~⑤之间负荷均失电。此时的负荷可分为两类, 一类为故障区域内的负荷, 如②~③之间的负荷, 处于故障区域内, 无法通过馈线自动化过程恢复供电, 可定义为“故障态”; 另一类为非故障区域的负荷, 如①~②和③~⑤之间的负荷, 处于非故障区域, 但由于②~③之间发生故障而失电, 如配电网络足够强壮, 可通过馈线自动化动作实现负荷恢复送电, 因此这两个区域内负荷可定义为“待恢复态”。
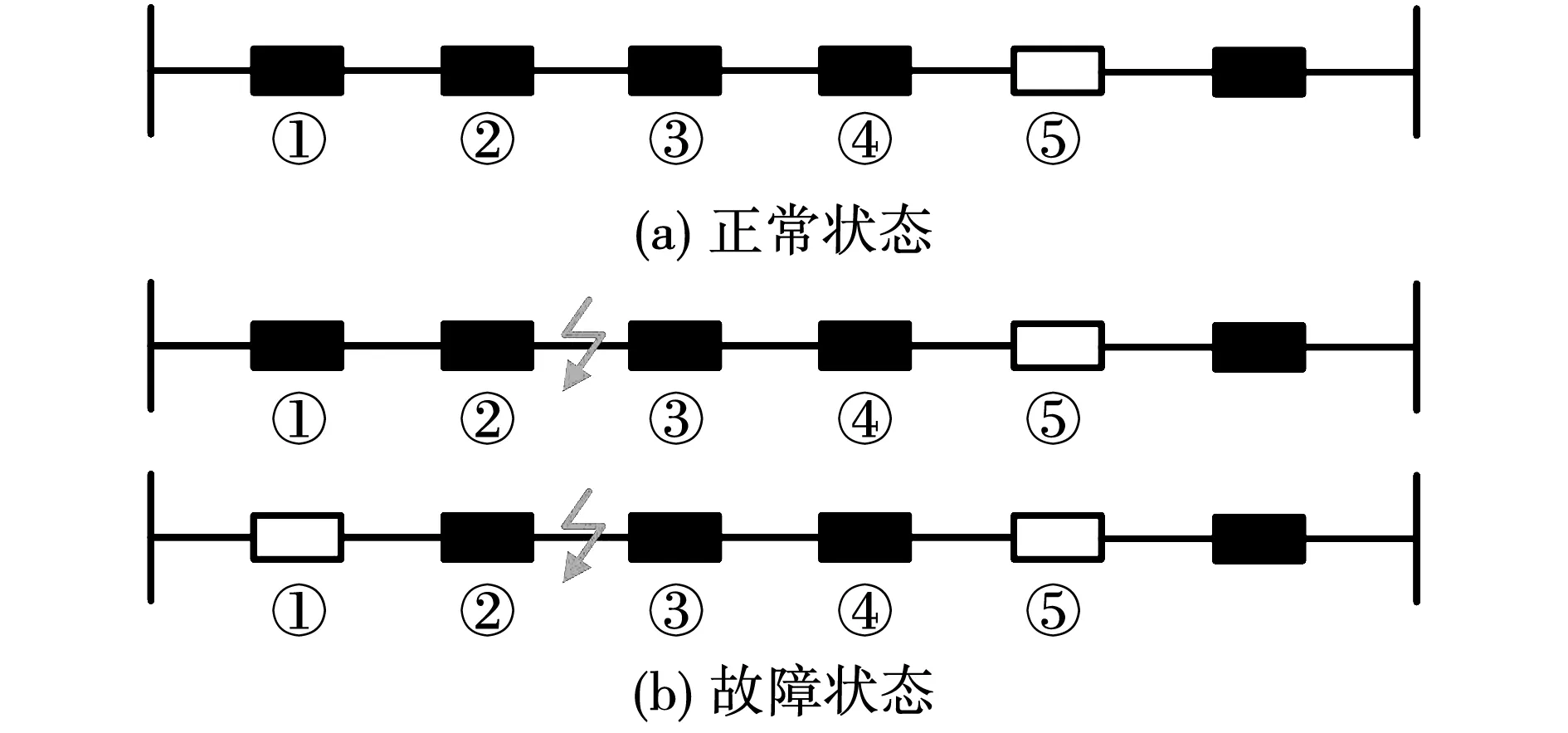
图2 负荷状态定义示意图Fig.2 The sketch of load states definition
以上定义负荷的“正常态”、“故障态”以及“待恢复态”, 伴随着馈线自动化过程将进行相互转变, 从这些状态的迁移中, 可以看出馈线自动化过程是否合理, 在网架强健的配电网中, 终态下所有的“待恢复态”负荷都将转变为“正常态”。在通信状态良好并且开关不存在拒动、误动情况下, 如图3所示, 仅负荷由“待恢复态”转变为“正常态”是合理的, 其余状态迁移均可认为是不合理的。
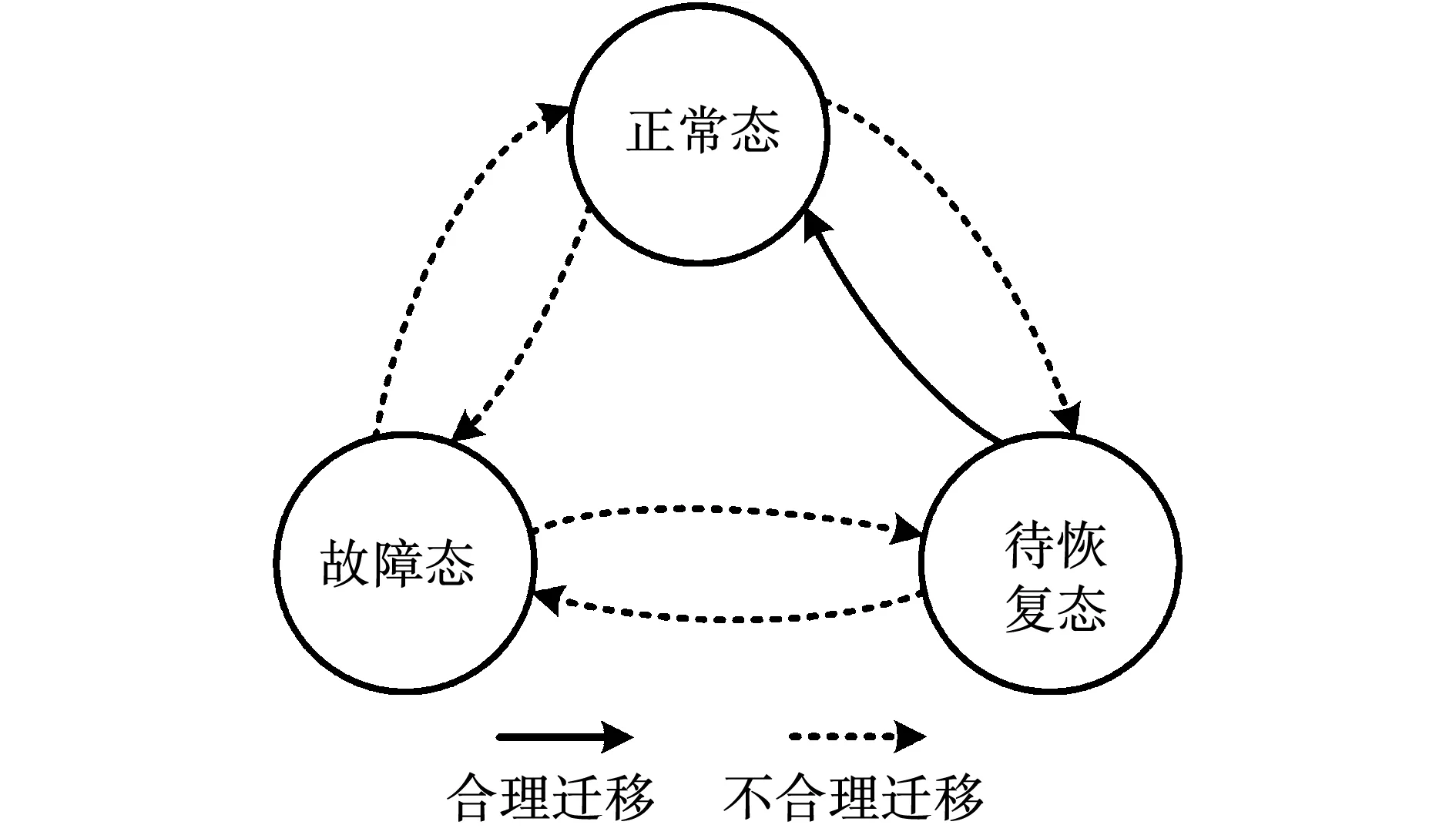
图3 状态迁移合理性示意Fig.3 The sketch of state transition reasonability
1.2 主动配电网馈线自动化动作干扰因素
馈线自动化这一过程能够实现本身依赖于配电网一次网架的强健以及二次系统的稳定, 信息传递对馈线自动化动作尤为重要。一方面, 配电终端故障或受到外界干扰使得传输数据有误, 将会使得主站得到错误数据从而导致错误的指令下发; 另一方面, 通信网络的堵塞、延时以及中断可能造成系统无法正常传输数据, 从而影响故障信息上送和命令下发的速度和时序配合的准确性。
此外,主动配电网中DG的接入使得配电网运行方式从传统的单向潮流转变为双向潮流,这对配电网馈线自动化算法及保护整定提出了更高的要求,既要满足灵敏性要求保证开关可靠动作,同时也要防止参数整定过高导致的开关误动。影响馈线自动化动作的主要干扰因素可概括为:
1)配电终端功能模块故障或者通信系统传输信号时受到外协扰动, 导致数据传输有误, 使得现场信息与主站中信息不一致。
2)配电终端功能模块故障或通信系统故障, 导致配电终端与主站失联。
3)故障隔离阶段发生开关拒动, 从而隔离失败,进一步影响负荷转供。
4)故障隔离阶段发生开关误动, 导致负荷失电或扩大停电范围。
5)负荷恢复阶段开关拒动, 影响非故障区域负荷恢复供电。
6)负荷恢复阶段开关误动, 导致配电网中形成电磁环网或负荷失电。
以上情况, 会出现故障隔离区域扩大、负荷失电等状态, 从而将会出现负荷由“待恢复态”转变为“故障态”等非正常的状态迁移。但逻辑合理的馈线自动化算法将能够合理应对这些干扰因素, 尽量减少不合理的状态迁移, 能够正确处理故障。
对于馈线自动化算法的理论研究众多, 但对其正常工况下以及干扰因素作用下的算法可靠性评价仍鲜有研究, 需要针对主动配电网馈线自动化动作的特点, 提出一种定量的评估方法。
2 馈线自动化动作评估体系
2.1 馈线自动化动作结果评价
为方便讨论, 本文以如图4所示的一条n分段m联络的馈线进行馈线自动化动作评估体系的论述。图5为两套馈线自动化算法对同一配电网络中故障的负荷供电曲线比较。
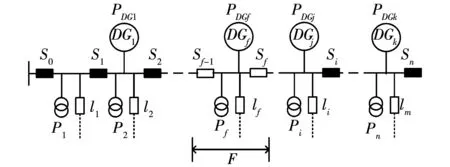
图4 一条n分段m联络馈线示意图Fig.4 Feeder diagram with n section and m interconnection
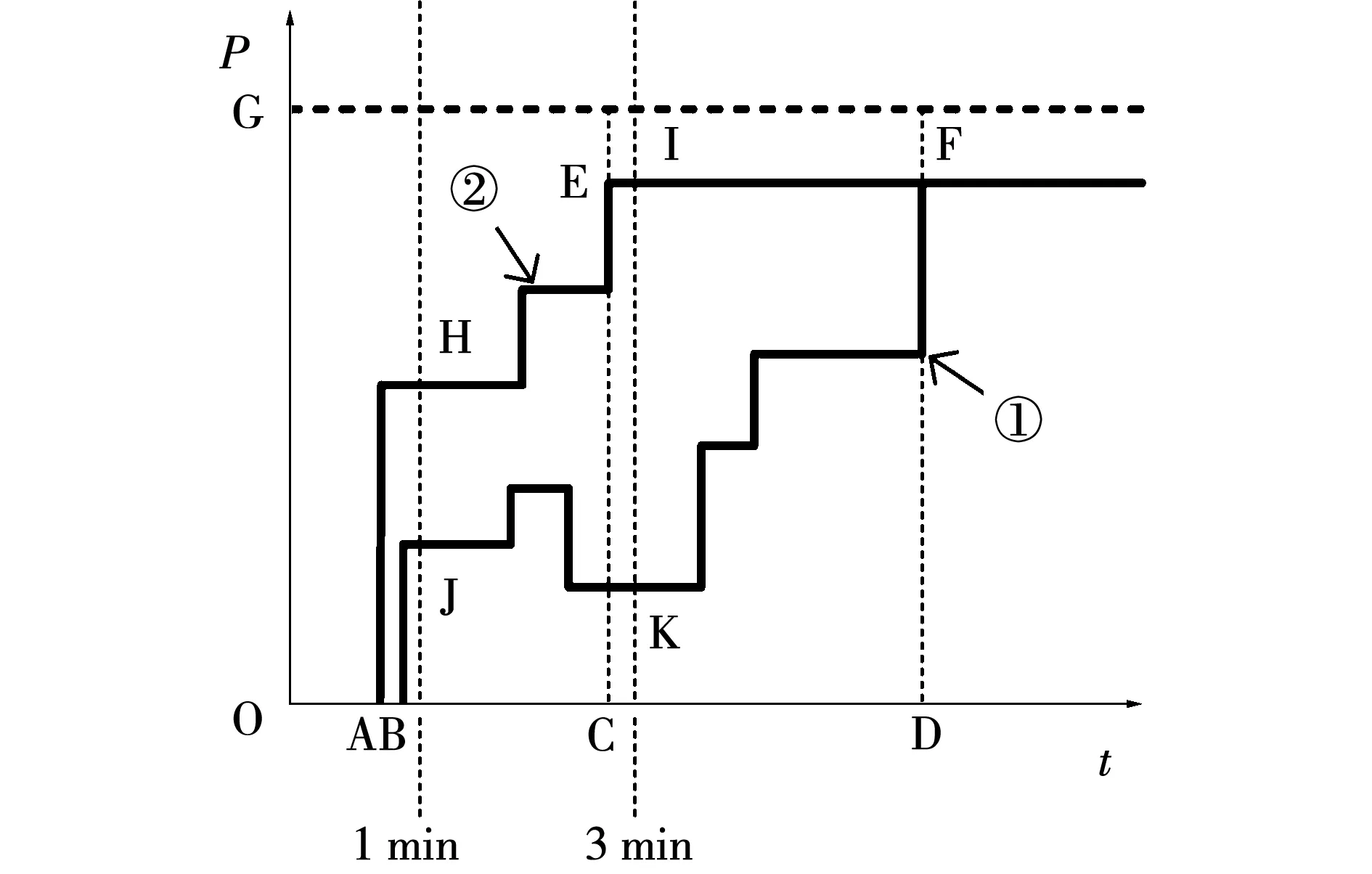
图5 馈线自动化动作过程中负荷供电曲线Fig.5 Load power supply curve during the feeder automation process
馈线自动化是在馈线发生故障时, 将故障区域隔离, 非故障区域恢复供电的过程。扩展到配电网层面, 由于DG的接入使得馈线自动化还增加了DG孤岛模式供电的过程。在此基础上, 本文提出以下3项指标作为馈线自动化动作的结果评价依据。
1)馈线自动化动作结束时间tFLISR
tFLISR指单次故障下, 从故障发生时刻O至馈线自动化动作结束的时间。图5中, 对于算法①,tFLISR为D点时间, 对于算法②,tFLISR为C点时间。
2)负荷恢复率γfinal
γfinal指馈线自动化动作结束后, 因该动作被恢复的负荷功率值(即由“待恢复态”变为“正常态”的负荷功率值)与未发生故障前馈线上的负荷功率值的比值, 即
(1)
对于算法①和算法②来说, 虽然其tFLISR不同但最终得到的γfinal相同, 均为E(F)点恢复负荷功率值与G点功率值的比值。
3)可再生能源接入率ηfinal
ηfinal指馈线自动化动作结束后, 所有DG向负荷供电的功率值与此时所有DG能够发出功率值的比值, 即
(2)
此处将DG代指可再生能源。
图5中, 如认为算法①与算法②的可再生能源接入率相同, 则两者仅馈线自动化动作结束时间存在差异, 然而算法①中存在着恢复供电负荷减少的情况, 表明存在不合理状态的迁移。这在馈线自动化动作过程中, 是不被允许的, 但相应的结果评价指标难以展现这一问题, 因此本文提出了馈线自动化动作的过程评价指标。
2.2 馈线自动化动作过程评价
针对馈线自动化动作结果评价的不足, 本文提出以下4项指标作为馈线自动化动作过程评价依据。其中, 馈线自动化过程一般在5 min内结束, 选取1 min和3 min两个特征时刻作为过程评价的计算点, 而部分DG在孤岛划分后才重新给负荷供电, 因此DG仅考虑3 min这个特征时刻。
4)1 min、3 min负荷恢复率γ1 min、γ3 min
γ1 min、γ3 min指馈线自动化动作1 min和3 min后, 因该动作被恢复的负荷功率值与未发生故障前馈线上的负荷功率值的比值, 即
(3)
(4)
对于算法①(②)来说,γ1 min、γ3 min分别为J(H)点和K(I)点恢复负荷功率值与G点功率值的比值。
5)3 min可再生能源接入率η3 min
η3 min指馈线自动化动作3 min后, 所有DG向负荷供电的功率值与此时所有DG能够发出功率值的比值, 即
(5)
6)开关变位次数ns+l
馈线自动化的过程主要涉及配电网中分段开关和联络开关的调整, 这一过程中开关变位次数从侧面反映了馈线自动化过程的速度, 也反映了馈线自动化算法的优劣, 是衡量馈线自动化动作过程的重要标准。
7)不合理状态迁移次数nft
由1.1节叙述可知, 正常的馈线自动化动作过程只有“待恢复态”向“正常态”的迁移, 其他均为不合理迁移,nft指馈线自动化动作过程中进行的不合理迁移次数。
正常情况下, 应无“待恢复态”负荷最终停电, 但当存在1.2节所述的馈线自动化动作干扰因素时, 需具体问题具体分析。仍以图2为例, 当②~③之间发生故障, 若无干扰因素, 最终故障隔离时是②和④开关断开, 则认为③~④内的“待恢复态”负荷最终停电为不合理的; 若③开关发生拒动, 则认为③~④内的“待恢复态”负荷最终停电为合理的。这将在测试用例中进行事先定义, 以区分“待恢复态”负荷最终停电是否合理, 不合理的停电也将导致不合理状态迁移次数增加。
3 馈线自动化动作评估方法
3.1 评价可靠性评价方法
馈线自动化算法用户关注的是配电网发生故障时, 其在各种条件下的动作成功率, 即馈线自动化算法是一种离散型软件。离散型软件可靠性测试, 是验证在给定的置信度下, 软件的可靠性水平能否满足需求而进行的测试。在测试过程中, 一般将成功率作为需要比较的可靠性参数, 利用事先约定的接受/拒收准则进行判断。目前比较常用的可靠性验证方法主要有以下3种:概率比序贯测试方法, 定数测试方法以及无失效测试方法[22]。
3种方案各自的特点如表1所示, 考虑到馈线自动化系统一旦做出错误决策, 其可能导致的扩大停电范围是用户所不能接受的, 因此, 本文选用无失效测试法进行可靠性测试。

表1 可靠性测试方法对比Tab.1 Comparison of three reliability test methods
无失效测试法的基本思想是:根据合同规定的参数(生产方风险α、使用方风险β、软件期望达到的成功率S0, 软件最低可接受的成功率S1)确定测试次数n, 在n次测试过程中, 若失效次数为0, 则接受此产品, 否则拒绝。
假定每次测试都满足贝努利实验的独立性, 则在n次试验中, 出现s次失效次数的概率服从二项分布。基于此, 用户接受软件的概率可用下式表示:
(6)
式中:n为测试次数;s为允许的最大失效次数;S为软件的可靠度。
生产方风险和使用方风险可用下式描述:
α=Pr{sn>s|S=S0}=1-P(n,s|S0)
(7)
β=Pr{sn≤s|S=S1}=P(n,s|S1)
(8)
式中sn为实际测试过程中, 测试n次出现的失效次数。
在无失效测试法中,s=0, 可确定最小测试次数, 考虑到n为整数, 可对上式进行取整计算, 最终确定最小测试次数为
(9)
式中{ }为取整运算。
基于无失效测试法, 馈线自动化动作在进行给定的nmin次测试过程中, 若失效次数为0, 即整个测试过程中没有发生故障区域扩大, 则认定接受软件, 否则拒绝。β、S1和nmin的关系如图6所示, 可见,β越小,S1越大, 需要的测试样本数nmin越大。
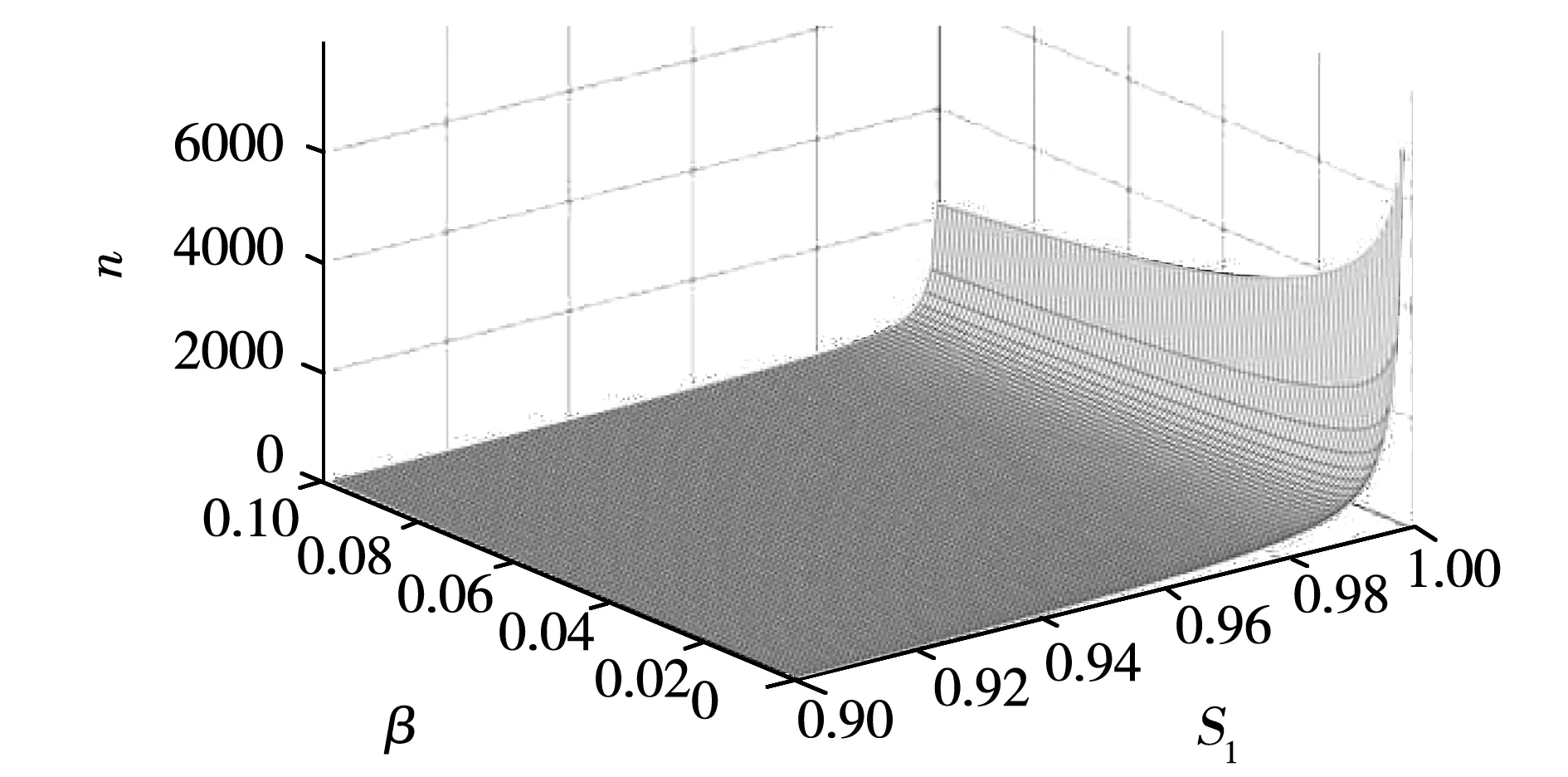
图6 nmin和β、S1的关系Fig.6 Relationship of nmin and β、S1
3.2 评估流程
对于前文所述的7个馈线自动化动作过程与结果指标, 不合理状态迁移次数nft作为先决指标, 当nft>0时, 即认为测试直接失效, 停止测试。当nft=0时, 才进行其他指标的计算。
对于具体测试网络的某一具体案例下, 均能够计算得到指标1)~6)的具体数值, 对其数值设定具体的分值对应关系, 最终可获得对馈线自动化动作的分值评价。具体分值设定可根据使用方关注内容而设定, 若使用方希望兼顾各方面指标, 则可设定6项指标最大分值相同; 若使用方更关注负荷的供电可靠性, 则可设定负荷恢复率指标分值高于其他指标。表2为关注负荷恢复率指标情况下各项指标的分值对应示例, 表中的具体评分标准应根据具体案例进行调整。
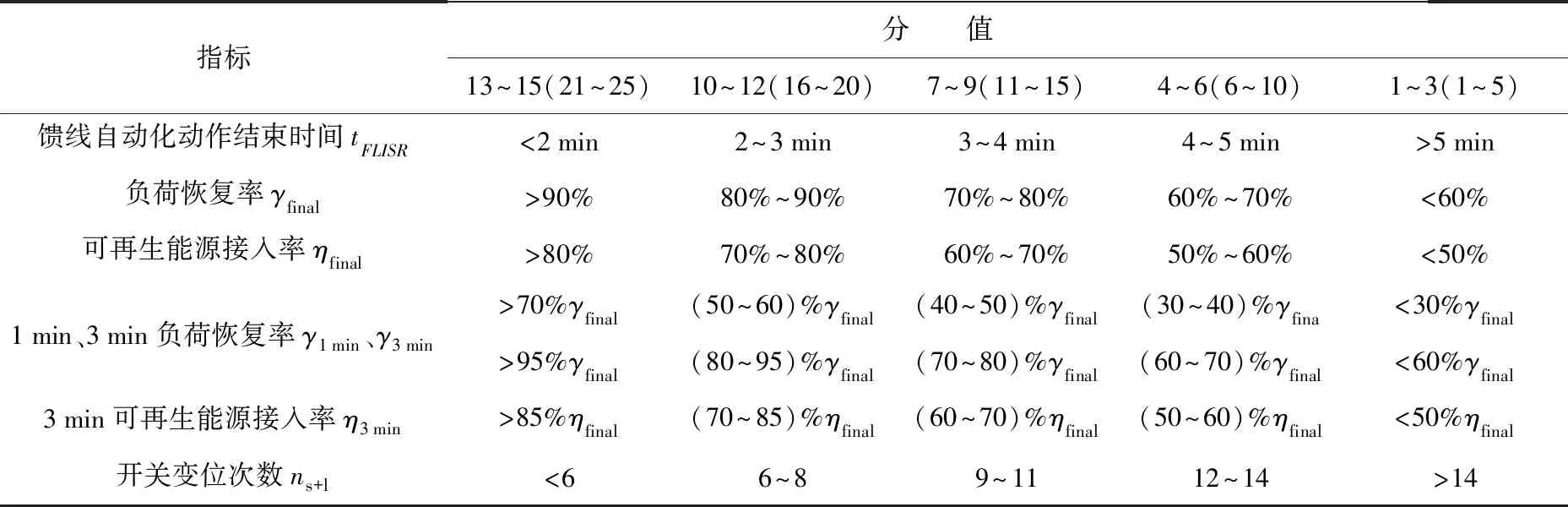
表2 可靠性测试方法对比Tab.2 Comparison of three reliability test methods
测试某一馈线自动化算法时, 具体步骤如下:
步骤1:生产方和使用方根据自身需求及算法特点, 确定β和S1, 并得到nmin, 确定测试案例,nmin个测试案例中应考虑所有干扰因素, 并确定接受算法的最低平均分值Χ。
步骤2:依次调取测试案例进行馈线自动化算法测试, 如不合理状态迁移次数nft>0, 算法失效, 测试立即终止, 转至步骤6。
步骤3:算法未失效情况下, 依次记录下测试案例对应的指标值, 并与形式同表2的分值对应表进行比较, 得出本案例下的指标分值之和χi。
步骤4:平均各次测试结果分数χ1, …,χn, 得到此馈线自动化算法的得分χ。
(10)
步骤5:比较Χ与χ, 若Χ>χ, 则拒绝接受该算法, 反之则接受该馈线自动化算法。
步骤6:结束。
4 算例仿真分析
图7为电缆双环网结构并接入分布式电源, 每个站所均配置智能配电终端, 可实现“三遥”, 以图7所示为测试网络对此系统内“转供分析”高级应用算法进行案例测试, 电网数据采用文[23]提出的仿真测试平台进行实时模拟, 能量管理系统与测试平台通过104规约进行信息交互。测试后的“转供分析”高级应用已应用于某主动配电网863示范现场。
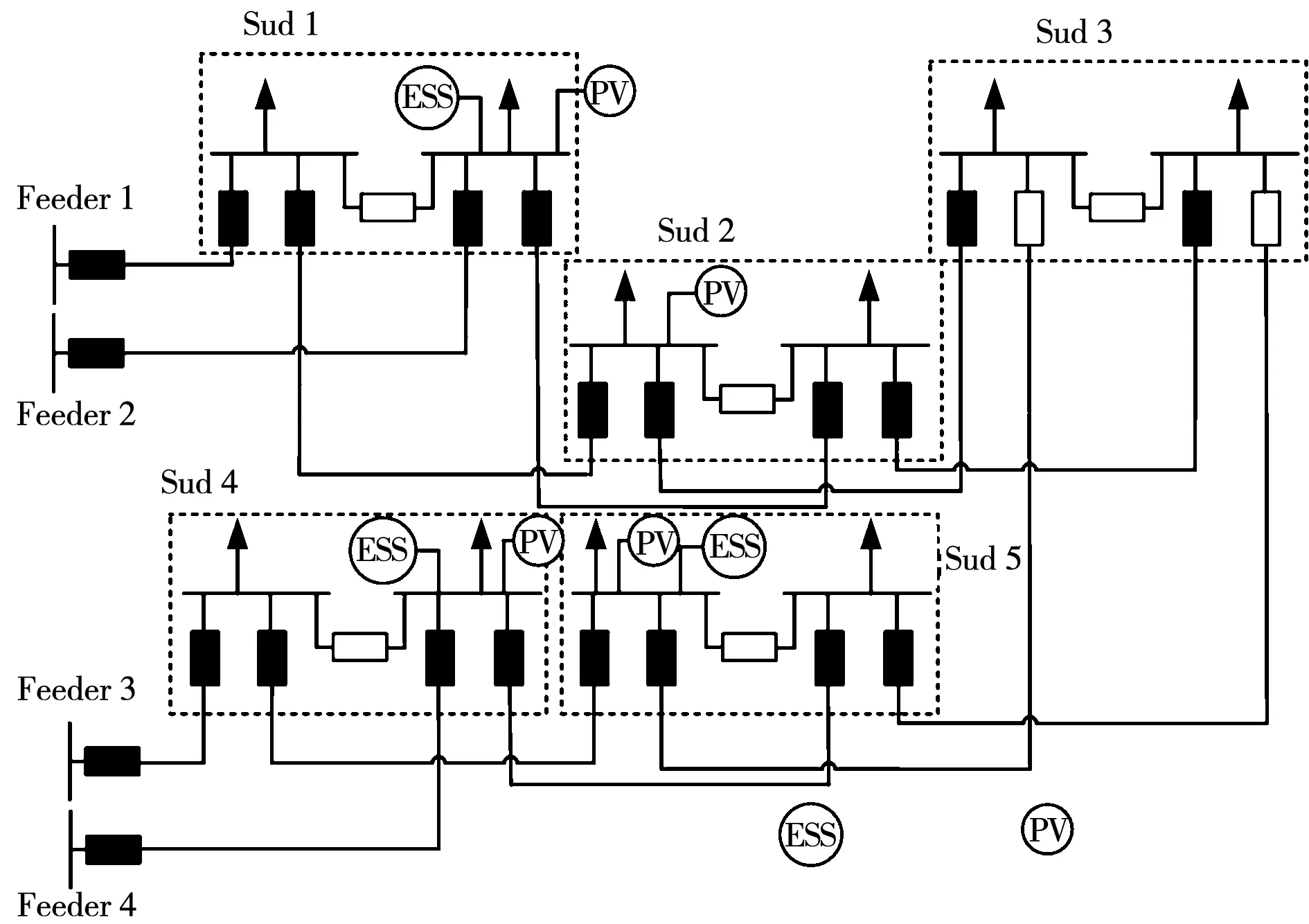
图7 算例拓扑图Fig.7 Topology diagram of study case
该测试按本文的评估方法进行, 具体步骤如下:
步骤1:确定β=0.05,S1=0.99, 并得到nmin为299。299个测试案例中涵盖2.2节所述干扰因素并同时考虑二重故障的情况, 形成预置案例库, 各案例形成分值对应表。确定接受算法的最低平均分值Χ=80。
步骤2:各测试案例下, 不合理状态迁移次数nft均为0, 算法未失效。
步骤3:依次对所有案例进行测试, 得出各案例下指标数值, 与案例库中分值对应表进行比较, 得出各案例对应的指标分值之和χi。
步骤5:比较可知χ>Χ, 可认为此馈线自动化算法满足要求。
整个测试过程表明该馈线自动化算法在考虑各项干扰因素以及二重故障的情况下, 具有正确处理的能力, 尽可能多的恢复“待恢复态”的负荷, 整个测试中未发生不合理状态迁移。以上验证结果说明, 该馈线自动化算法无论在正常情况或干扰情况下, 均能较好地适应, 验证了其可靠性。
图8 前n次χ平均值Fig.8 Mean of the first n th χ
5 结 论
本文综合考虑配电网馈线自动化动作过程中负荷状态的切换, 并计及动作干扰因素的影响, 从馈线自动化动作过程和动作结果两个角度, 对馈线自动化动作效果进行定量评价:
1)建立了主动配电网馈线自动化动作评估体系, 所提出的7个定量评价指标能够实现馈线自动化动作过程和动作结果的综合评估。
2)基于无失效测试法, 改进了配电网馈线自动化动作评估方法, 算例系统验证了该测试方法的有效性。
相比于传统的评估方法, 本文所提出的评估方法具有更好的便捷性和全面性, 可为配电网馈线自动化的发展普及提供技术支撑。未来将进一步研究馈线自动化算法优化与效果评估。
