地基云遥感反演进展及挑战
2021-05-21赵传峰杨以坤
赵传峰,杨以坤
(北京师范大学全球变化与地球系统科学研究院,北京100875)
引言
云在地球系统辐射能量平衡和大气水循环中扮演着至关重要的作用(Ramanathan et al.,1989;Harri⁃son et al.,1990;Hartmann et al.,1992;Norris,2005;IPCC,2013;Zhao and Garrett,2015)。对于辐射能量平衡,云通过反射太阳辐射使得地面白天不会太热(Sch⁃neider,1972;Ramanathan et al.,1989),通过阻挡长波辐射使得夜间不会太冷(Garrett and Zhao,2006;Zhao and Garrett,2015),从而使得地球适合人类生存。在大气水循环方面,江河湖海的水汽蒸发以后通过云和降水为陆地提供重要的淡水资源。云对辐射的调节能力和形成降水的多少与云的宏微观特征紧密相关(Twomey et al.,1977;Albrecht,1989;Garrett and Zhao,2006)。然而,云特征的观测一直存在较大误差,云的表征也是模式天气预测和气候预估中最大的不确定性因子(IPCC,2013)。要充分理解未来天气和气候变化,需要获得更为准确的云特征,对云发生发展过程形成更为准确的理解。
云宏微观特征可以通过原位观测和遥感观测获得,包括飞机原位观测、地基和卫星遥感观测。飞机观测在各类观测中的准确度最高,但由于观测成本高和观测环境不能过于恶劣等原因而造成观测时间、观测次数和观测样本有限。飞机观测数据通常用于云发展过程和特征的个例研究和参数化构建(Jensen et al.,2016;Zhao et al.,2018b;Yang et al.,2019;Zhao et al.,2019b),而很难用于获取长时间或大范围的云宏微观特征。卫星遥感观测包括静止卫星和极轨卫星观测,分别具有较高的时间分辨率和空间分辨率,且能够实现大范围观测,因此在云特征观测上具有很大的独特优势,被广泛用于云特征的反演、统计研究和模式模拟评估研究(Xie et al.,2013;Wang and Zhao,2017;Li et al.,2018;Bao et al.,2018,2019;Chen et al.,2019;Wang et al.,2019;Zhang et al.,2019;Zhao et al.,2019a;Yang et al.,2020)。然而,卫星云观测的不确定性相对较大,时间和空间分辨率相对于飞机和地面还是过于粗糙而无法用于很多云相关过程研究。地面云遥感观测精度多介于飞机和卫星观测之间、时间分辨率高且能长时间连续观测,并且可以与地面多种仪器观测配合,共同反演云特征或彼此进行印证(Zhao et al.,2012b;Garrett and Zhao,2013;Zhao et al.,2014a,2016;Yang et al.,2018)。在实际应用中,飞机原位观测多用于对地面或卫星遥感观测的诊断和评估(Garrett and Zhao,2013;Zhao et al.,2020b);地面遥感观测多用于对卫星遥感观测和模式模拟研究的诊断和评估(Zhao et al.,2012a;Xie et al.,2013;Ma et al.,2018),而卫星遥感观测多用于对模式模拟研究的诊断和评估(Xie et al.,2013;Ma et al.,2018)。
地面云遥感观测自20世纪末以来,已经逐渐在多个站点构建并自动运行,包括国际著名的美国能源部大气辐射观测计划(Atmospheric Radiation Measure⁃ment program,ARM)(Ackerman and Stokes,2003)。相应的,利用地基云遥感观测的反演方法在过去30 a间发展非常迅速,但是云反演产品之间彼此差异较大(Huang et al.,2012;Zhao et al.,2012b)。在宏观特征方面,由于主动遥感仪器垂直分辨率的差异,云回波信号的临界值选取等问题,各个方法在云识别、云边界和云相态的反演上还存在着较大差异(Zhao et al.,2014a)。在微观特征方面,由于很多云遥感反演方法采纳的数据不同、方法理论基础存在差异、所使用的假设不同、以及根据不同飞机观测采纳的经验参数也不同,不同云反演产品间存在着较大差异,为准确或可靠的使用这些云产品造成困扰(Zhao et al.,2012a)。为有效合理使用云反演产品,不仅需要研发统一的云反演不确定性量化方法(Zhao et al.,2014b;Chen et al.,2015),更需要全面认识其机理、假设、优势和局限性。本文对现有地基云遥感观测及反演技术进行系统总结归纳,以期为地基云遥感反演方法和产品的应用提供参考。
1 地基云遥感观测
1.1 观测仪器及计划
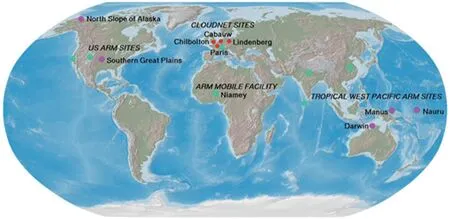
图1 全球较为著名的地面云相关变量综合观测站点分布情况(分别来自美国的大气辐射观测计划ARM和欧洲的Cloudnet站点网,图为两个计划2015年的站点分布图,2015年以后站点数目有所变化,引自早期的ARM网站)Fig.1 The spatial distribution of ground stations for several well-known world comprehensive atmospheric experiments,including the U.S.Depart of Energy(DOE)Atmospheric radiation measurement program(ARM)and the Europe Cloudnet project.Note that the stations shown here are for the time period before 2015,and the stations have changed a little since 2015.Source:ARM website of early version.
地基云遥感观测可以提供连续、高时间分辨率的云观测数据,被广泛应用于云特征的评估诊断研究和过程机理研究,具有重要的科学意义。图1为全球较为著名的地面云相关变量综合观测站点分布情况,分别来自美国的ARM和欧洲的Cloudnet站点网。注意该图为两个计划2015年的站点分布图,2015年以后站点数目获得了进一步增加。尽管图1仅给出了2个观测计划的部分站点信息,但其表明了欧美发达国家地区的地面云观测站点相对较为丰富。与之相反,亚洲、非洲和南美洲的观测站点相对较为稀少。事实上,ARM计划从1989年开始连续开展了包括云降水的大气综合观测,旨在探测和研究云与生物圈,太阳辐射穿过大气的特征和大地向外的返回辐射状况。该计划包括3个固定站点观测和2个移动观测。3个固定站点分别为中纬度美国南部大平原站点(South⁃ern Great Plain,SGP),北极阿拉斯加北坡站点(North Slope of Alaska,NSA),东北大西洋站(Eastern North At⁃lantic,ENA)。2015年之前ARM计划还在热带西太平洋(Tropical Western Pacific,TWP)设有3个固定站点,即图1中的Darwin,Manus和Nauru三个站点。欧洲Cloudnet项目起始于2001年,主要目的是利用地面站点网络的观测对天气预报模式中云和气溶胶廓线模拟进行连续诊断。Cloudnet现在由欧洲ACTRIS(Aerosol,Clouds and Trace Gases Research Infrastruc⁃ture)项目支持,目前在欧洲有16个地面常规观测站点,分 别 是Bucherest、Cabauw、Chilbolton、Granada、Hyytiälä、Juelich、Kenttärova、Leipzig、Lindenberg、Mace Head、Munich、Norunda、NyÅlesund、Palaiseau、Poten⁃za、Schneefernerhaus,其中Chilbolton、Cabauw和Palais⁃eau观测时间相对较长。中国2000年后一些高校和科研院所也陆续建立了一些地基综合观测站点,然而含有云观测站点的相对较少,连续观测时间相对较短。图2给出了包含地基云观测的部分站点分布图,其中比较具有代表性的含云观测站点有兰州大学SACOL站点、中科院大气所香河站点、合肥物质研究所科学岛站点,另外还有一些短期观测的综合实验。表1列出了美国、欧洲和中国有关地基云测量站点、观测时间和有关云观测的相关信息。

图2 中国近些年开展的地基云观测实验部分站点(站点连续观测的时间相对图1中的国际站点短暂)Fig.2 Part of the experimental ground stations for atmospheric observations installed in China,including cloud observations.Note that the continuous observation periods at these stations are relatively shorter than those at the international sites shown in Fig.1.
1.2 地基云遥感参数
云特征可分为宏观特征和微观特征。云的宏观特征包括云量、云出现频率、云顶高度、云底高度、云顶温度、云底温度、云几何厚度和云光学厚度等;云微观特征包括云相态、云水含量、云粒子谱分布、云滴数浓度、冰晶形状、冰水含量、云滴有效半径等。目前云宏观特征观测的仪器主要包括云高仪(Ceil⁃ometer)、云雷达(Millemeter cloud radar,MMCR)、微脉冲激光雷达(Micropulse lidar,MPL)、探空廓线(Radio⁃sonde)、拉曼激光雷达等。通常而言,云高仪和微脉冲激光雷达具有较高的垂直空间分辨率,可以达到10 m以下(如7.5 m),对云识别和云边界的确定具有优势。然而,云高仪和微脉冲激光雷达由于波长较短而衰减很快,加上为了对眼睛无伤害而限制激光能量,所以这两种仪器无法穿透较厚云层而失去了对厚云云顶的探测能力。与之相比,云雷达又称毫米波云雷达,具有很强穿透能力在云顶探测和云层探测上具有独特优势,对细小的云雾粒子具有较高的探测精度;但由于毫米波云雷达工作波长介于1~10 mm之间(主要为W波段3 mm/94 GHz和Ka波段8 mm/35 GHz)受雨的衰减相当严重,因此云雷达一般只探测非降水云、毛毛雨、雾及沙尘暴。此外,由于云雷达垂直分辨率要比云高仪和微脉冲激光雷达粗糙而对于薄云探测能力弱。相对于主动遥感仪器而言,被动遥感通过测量辐射波谱信息,可以用于识别云的存在与否(云量),却很难准确判断云边界。探空廓线对云的观测主要是利用温度和湿度廓线,设定阈值从而确定云的存在、边界等信息。对于云微观特征的观测,现有技术也多是基于云雷达、微脉冲激光雷达、微波辐射计(Microwave Radiometer)、大气辐射干涉仪(Atmospheric Emitted Radiance Interferometer,AERI)等。第2节会对具体方法进行详细介绍。图3给出了地基云观测的结构示意图,包含了常用的地基云遥感观测仪器。
2 地基云遥感反演
对应不同的云宏微观特征,现有研究多采用不同的遥感仪器和遥感反演方法。一般而言,云的遥感观测首先是确定云的存在与否,即云识别问题,同时可以基于观测进一步判定云量或者云的频率。当判定有云以后,第二步是获取云的宏观特征,即云底高度、云顶高度、云底温度、云顶温度、云厚等特征。第三步一般是对云相态的确定,区分水云、冰云以及混合云。针对不同的云相态,分别采取不同的遥感反演方法进一步获取云的微观特征,也就是第四步。最后,即第五步,基于获取的云宏微观特征,结合对云的理论认知,获取其它未直接反演获得的云宏微观物理量,如云水含量、云滴数浓度等。下面就不同的云特征遥感反演方法进行综述。
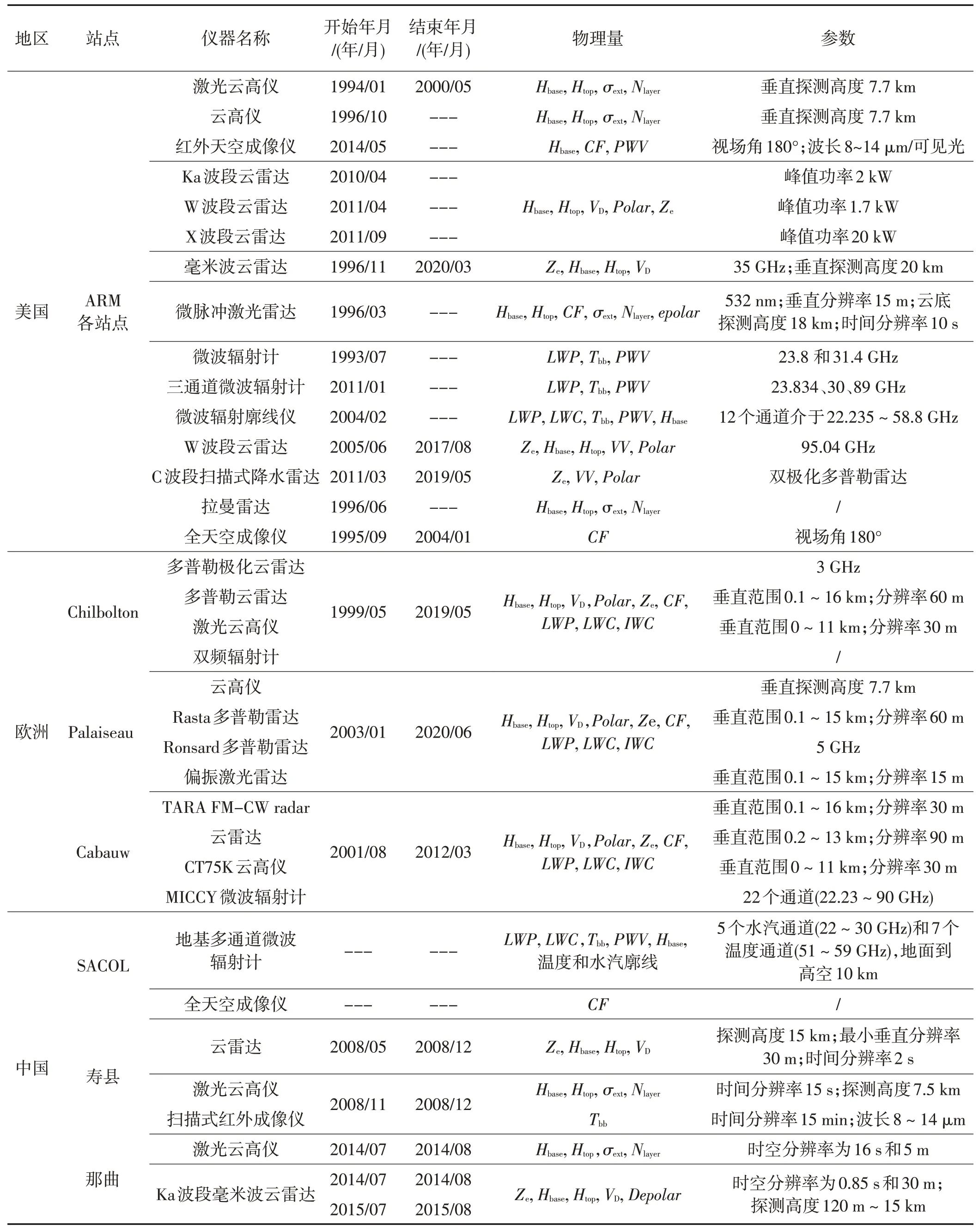
表1 美国、欧洲和中国地区部分地基云测量站点相关信息Table 1 Part of the ground stations and related information in U.S.,Europe and China.
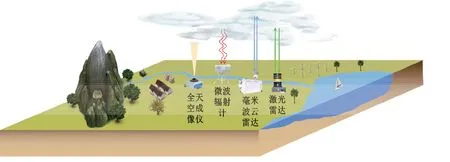
图3 地基云遥感观测结构设备示意图(包含了常用的地基云遥感观测仪器)Fig.3 Illustration of ground-based remote sensing of clouds,which demonstrates the often used cloud remote sensing instruments.
2.1 云识别
云的识别通常包括四种方法:基于主动遥感回波信号的主动遥感方法,基于探空相对湿度的探空识别方法,基于被动遥感亮温或者图像的被动遥感方法,以及基于飞机云水含量和云粒子数浓度观测的原位探测方法。其中基于飞机原位观测的云水含量和云粒子数浓度方法不属于地基云遥感观测,在这里不予介绍。
2.1.1 被动遥感识别法
美国气象协会对云的定义是人的眼睛可以看到的水成物集合体,属于被动遥感的图像方法。随着遥感探测技术的发展,相机取代眼睛,人们利用照相机识别云的存在和多少,并进行记录留存。无论是人眼还是相机,除了识别云的存在,还可以初步估算云量。基于人眼和相机对云量的估算一般采用十分制,如1/10,2/10等。国内外早期的云观测主要采用人工观测和十分制方法。与此同时,根据人的感觉或者云在阳光下的阴影位置,早期观测还可以大致判断云底的高度并对云的类型进行划分,即高云、中云和低云。这种观测通常存在较大的误差,较粗糙的时间分辨率(观测时次有限)和较低的垂直分辨率(仅判断低、中、高云)。
20世纪70年代左右,辐射波谱观测仪器开始普及使用,无论是用在地面还是卫星观测平台上。目前测量辐射波谱信息的仪器有很多,如大气辐射干涉仪、多光谱旋转遮蔽影带辐射仪(Multifilter Rotation Shad⁃ow-band Radiometer,MFRSR)、微波辐射计等。如图4所示,利用辐射波谱信息可以根据亮温随波谱的变化判断云的存在与否,甚至可以结合冰水复折射指数随波谱变化进一步判定云的相态(Garrett and Zhao,2013)。利用辐射波谱可以连续观测云特征而具有较高的时间分辨率,尤其是红外辐射波谱,可以全天候(白天+夜间)开展云的识别探测。但是辐射波谱信息无法确定云量和云的高度。考虑到其高时间分辨率,辐射波谱的探测可以提供云出现的时间频率。基于泰勒冻结假设(Taylor,1938),时间上的云出现频率可以间接代表云量的多少。

图4 被动遥感识别探测云的方法个例示意图(引自Ahn et al.,2014)Fig.4 An example for the cloud detection algorithm based on passive remote sensing observations at ground stations(Adopted from Ahn et al.,2014).
2.1.2 主动遥感识别方法
不同于被动遥感,主动遥感由于具有发射器,因此可以通过发射信号和回波信号之间的时间差准确地判断云的边界以及云的存在与否。然而,脉冲强度和脉冲频率的差异导致不同频率主动遥感仪器的云识别能力存在差异,尤其是激光雷达和云雷达之间差异比较明显。激光雷达一般采纳可见光(532 nm)或者近红外(1 064 nm)波段,且为了保障眼睛安全激光能量通常较低。激光雷达的垂直探测精度高,垂直分辨率通常在10 m以下,但激光能量衰减较快,垂直探测距离有限,尤其是有云观测。比如广泛使用的微脉冲激光雷达和云高仪垂直空间分辨率可以达到7.5 m,但很难穿透几百米以上的云层,因此仅能用于判断天空是否有云存在且仅能判断距离地面最近的云层。与激光雷达相比,毫米波云雷达,由于频率较低而具有很强的穿云能力,从而具有很大的垂直空间探测能力,在云顶高度和云层识别上具有更高优势。然而,毫米波云雷达的垂直空间分辨率通常要低于激光雷达,多为30 m或45 m。因此,云雷达在云边界探测精度和薄云识别上弱于激光雷达。
利用激光雷达识别云层存在与否的误差主要来源于两个方面,一是气溶胶和云层辨别,二是雷达信号的衰减或者信噪比的强弱。公式(1)给出空气中颗粒物弹性后向散射的激光雷达回波信号表达形式

公式(1)中P(z)表示激光雷达接收到的高度z上的大气后向散射功率(W),β(z)表示高度z上的大气后向散射系数,α(z')表示高度z'上的大气消光系数,O(z)表示重叠因子(1在盲区之外,<1在盲区之内)。距离校正信号为z2P(z)。从公式(1)可以看出,激光雷达信号的衰减与距离和大气消光有关。
Zhao等(2014a)研究指出由于激光雷达信号衰减太快,对于高层云或者多层云的识别具有很大局限性。通过诸如数值均衡化和离散化(Zhao et al.,2014a;Wang et al.,2018)等手段可以适当放大弱信号,增强激光雷达对高层云和多层云的探测识别能力,但这种增强幅度有限。
对于气溶胶层和云层的识别,绝大多数方法采用临界值来进行划分。一般而言,云滴半径多介于1~50μm,云中冰晶半径多在20μm以上(20~1 000μm);与之相比,气溶胶颗粒的半径多在1μm以下,尽管部分沙尘的粒径可以达到10μm以上。基于Rayleigh散射原理,在入射信号一致的情况下,回波信号的强弱与粒子大小的6次方成正比,这使得云层的回波信号一般都要大于气溶胶层回波信号。基于此,许多研究设定了不同的阈值来判定云和气溶胶层(如Zhao et al.,2014a)。当然,阈值选取的差异也会造成识别结果不同。
2.1.3 探空廓线识别方法
探空廓线的主要目的是探测大气的基本状态,即温度、湿度、压强和风速与风向,从而服务于天气预报等。温度和绝对湿度的探测还可以进一步用于确定相对湿度,从而对云层进行识别。受限于有限的探空观测,该方法同样具有较粗的时间分辨率。利用探空廓线识别云层的基本原理是云中相对湿度处于饱和、过饱和或者亚饱和的高相对湿度状态。因此,通过设定相对湿度的临界阈值,如84%(Wang and Rossow,1995;周毓全和欧建军,2010;Wang et al.,2018),从而确定云层的存在与否,同时基于84%的高度值,还可以用于确定云的边界宏观特征(2.2节)。需要值得注意的是,临界值的选取可能会随着大气状态(如垂直速度、气溶胶等)而发生变化,不同研究选取的临界值有着一定差异,造成云层识别结果的不确定性。表2给出了基于探空相对湿度(RH)确定云层的若干文献临界方法或阈值。
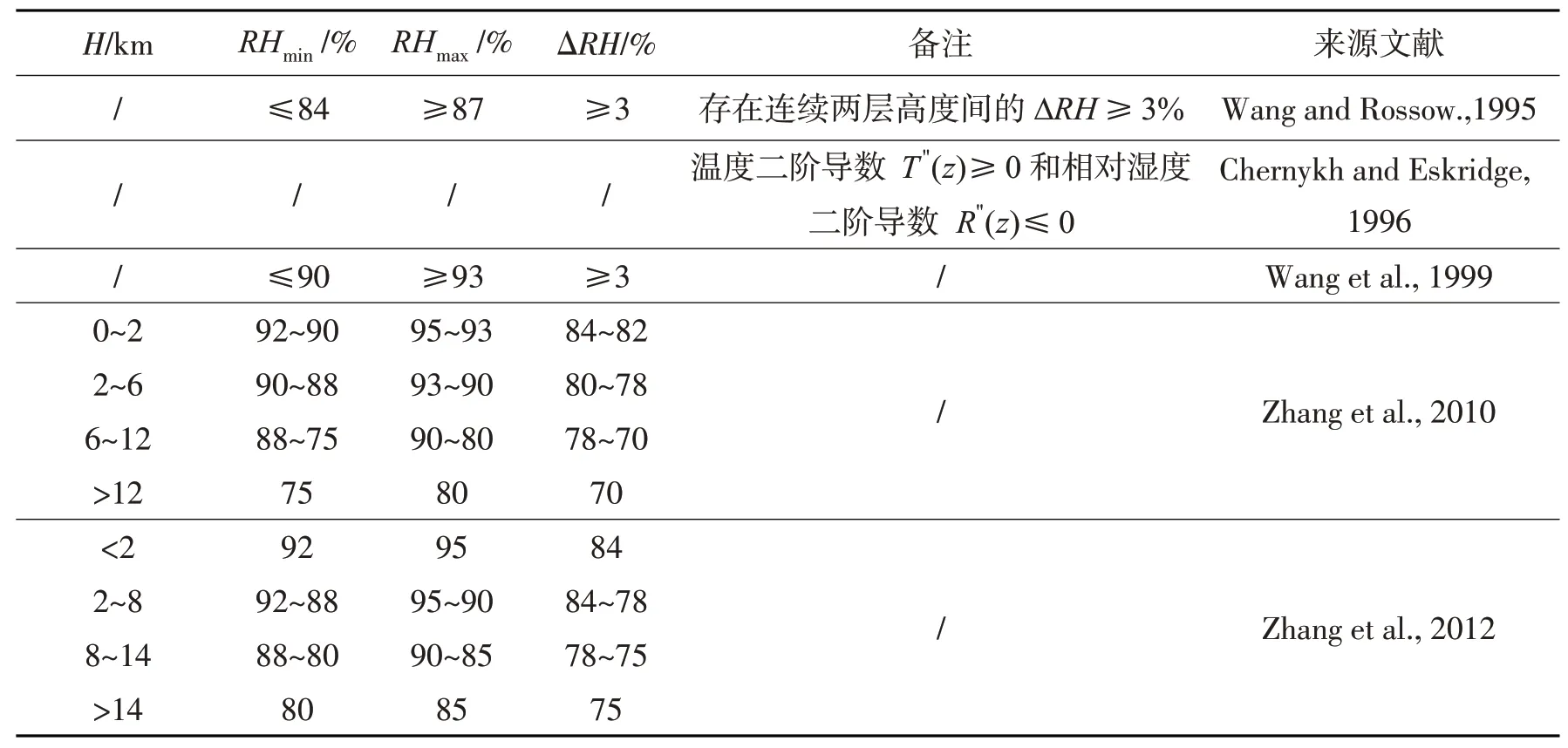
表2 基于探空相对湿度确定云层的若干临界方法或阈值Table 2 Methods or threshold values of relative humidity observed from radiosondes,which are used by part of previous studies for cloud detection.
2.2 云宏观特征反演
云宏观特征与云的识别紧密相关,基于地基遥感的获取方法与云识别的三种方法相对应,这里逐一进行介绍。
2.2.1 被动遥感方法
被动遥感方法由于没有发射光源而难以对云的边界进行判定,一般无法获取云顶、云底、云层等相关特征。被动遥感方法能够获取的云宏观物理特征包括云量、云出现频率、云光学厚度和亮温等信息。对于全天空成像仪(Total Sky Imager,TSI)、相机或者人眼来说,可以判定天空中的云覆盖度,从而获取云量信息;同时基于多个时刻的云量信息可以进一步决定云出现频率信息。然而,被动成像系统无法确定云的亮温和光学厚度。与之相比,辐射波谱信息(如红外高光谱、多光谱旋转遮蔽影带辐射仪)可以用于确定云的亮温,并可以基于波谱信息进一步反演云光学厚度。云亮温(T)定义为假定云为黑体时对应观测辐射能量I(λ,T)的云温度,可以利用普朗克定律进行求解

其中I(λ,T)为波长λ处的辐射亮度(单位:W·m-2·μm-1);λ为波长(单位:μm);c1为第一辐射常数,取值为3.742 7×108W·μm4·m-2;c2为第二辐射常数,取值为14 388μm·K;c、h和k分别为光速、普朗克常数和玻尔兹曼常数。
2.2.2 主动遥感方法
主动遥感可以根据回波信号与发射信号的时间差确定云边界、云层数和云几何厚度,并根据前面介绍的云识别结果判断云出现频率。回波信号频率决定了主动遥感的径向距离分辨率(Radar Range Gate)。当主动遥感垂直探测时(绝大多数地基主动遥感采用的方式),径向距离分辨率即为垂直探测分辨率,云高仪和微脉冲激光雷达垂直探测分辨率为7.5 m,云雷达垂直探测分辨率一般为30 m或者45 m。注意云高仪与微脉冲激光雷达的探测能力相近。垂直分辨率的大小即为云边界识别的最小误差。另一方面,激光雷达信号衰减快,而云雷达信号穿透能力强。因此,云高仪和微脉冲激光雷达在云底高度的探测上具有优势,而云雷达在云顶高度和云层探测上具有优势。由于气溶胶和云层之间的识别采用阈值方法,这也会造成云识别、包括云边界确定的误差(Zhao et al.,2014a)。除了这两个与云识别一样的主要误差来源以外,雷达回波信号的处理方式也可以引入额外误差。Zhao等(2014a)发现雷达原始信号经常需要进行平滑和均值等处理,而所采用的平滑方法不同,会引入不同程度的误差。因为雷达信号在进行平滑处理时,云边界的突变信号经过平滑处理后变为渐变信号,这往往造成云底和云顶高度识别误差。
当降雨发生时,云底高度的识别难度会进一步加大。尽管云高仪和微脉冲激光雷达信号受到降雨的衰减,较弱降水情景时,云高仪和微脉冲激光雷达仍然具有很好的云底探测能力,但在较大降水情景则失去了探测能力。对于云高仪和微脉冲激光雷达,由于波长短而使得回波信号与粒子大小的2次方和数浓度成正比;对于云雷达,由于波长较长而使得回波信号与粒子大小的6次方和数浓度成正比。考虑到云滴数浓度高(101~103cm-3)和粒径小(100~102μm)、而雨滴数浓度低的多(101~104m-3)和粒径较大(102~104μm),云高仪和微脉冲激光雷达碰到云层的回波信号远大于降水层存在时的回波信号从而可以清晰的分辨云层、确定云底高度;与之相比,云雷达碰到云层的回波信号要小于或者近似于碰到降水层的回波信号从而无法清晰的分辨云层和降水层,无法确定降水云的云底高度。正是基于微脉冲激光雷达与云雷达在识别云和降水能力上的差异,Zhao等(2008)区分了北极地区云和降水并开展了降水遥感反演方法的研究。
2.2.3 探空廓线识别方法
正如前面所述,根据探空仪相对湿度的垂直廓线可以通过设定临界值(如表2所示)识别云层。同样,可以根据临界值确定云的边界、云层等信息。在探空仪上升过程中,当相对湿度达到某一临界值(如84%),并继续上升超过临界值时,定义达到临界值的高度为云底高度,超过临界值的高度层为云层;当探空仪继续上升,相对湿度开始减少,达到临界值并继续上升低于临界值时,定义达到临界值的高度为云顶高度。其它云层采用同样的方法进行确定。确定云底和云顶高度后,根据探空仪测得的温度廓线信息,同样可以确定云底和云顶的温度。
值得注意的是,探空观测中探空仪对湿度的响应会造成误差,一般情况当入云相对湿度增加时,探空仪的响应比较及时,因此云底高度的探测较为准确。但是当出云相对湿度骤然减少时,探空仪的响应较为缓慢,有时会造成较大的延迟,使得探空仪测得的云顶高度被高估,造成较大不确定性(Naud et al.,2003;孙丽和赵姝慧,2018)。
2.3 云相态判定
云相态(包括液相、混合相和冰相)的确定是合理选择云微观特征参数反演方法的前提。云相态的确定存在多种方法,这里只介绍地基遥感观测的云相态判定方法。可以根据所用地基遥感观测数据的差异概括为四种方法,分别为基于辐射波谱、温度、雷达退偏比和多仪器综合的方法。
基于辐射波谱信息确定云相态方法的理论基础是冰水复折射指数的差异。这种差异造成云冰和云水在不同波长的吸收系数和辐射系数不同,从而两种不同相态造成的辐射波谱存在差异。根据实际辐射波谱信息与水云、冰云理论上的辐射波谱信息之间的差异,从而设定不同波段之间辐射或者辐射系数之间差异的阈值,确定云的相态(Turner et al.,2003;Shupe et al.,2005;Garrett and Zhao,2013)。图5为基于辐射波谱信息确定云相态的基本原理个例示意图:基于两个波段的辐射差异并结合其中一个波段的辐射信息,通过确定临界值区分冰云、水云和混合云。值得注意的是基于辐射波谱信息确定的云相态是一种等效辐射的云相态信息,不完全等同于热力状态的云相态,两者之间会存在一定差异(Garrett and Zhao,2013)。

图5 基于辐射波谱信息确定云相态的基本原理个例示意图(基于两个波段的辐射差异并结合其中一个波段的辐射信息,通过确定临界值区分冰云、水云和混合云,引自Garrett and Zhao,2013)Fig.5 A case illustration about the principle of cloud phase determination from spectral radiation measurements(Based on the thermal emissivity difference at two wavelengths along with the emissivity at one of the two wavelengths.The cloud phase is identified by setting threshold values.Adopted from Garrett and Zhao,2013).
基于温度确定云相态的方法相对简单,但是使用却较为广泛。一般而言,温度在0℃以上的云层可以确定为水云,然而混合云相态对应的温度范围不容易确定。美国能源部ARM计划官方产品MICROBASE(Zhao et al.,2012b,2014b)设定温度在0~-16℃之间为混合云,温度低于-16℃为冰云。另有部分研究设定温度在0~-20℃之间为混合云,温度低于-20℃为冰云(Cober et al.,2001;Ikeda et al.,2007;Yorks et al.,2011)。但是也有一些研究(Rauber and Tokay,1991;Pinto,1998;Garrett and Zhao,2013;Wang et al.,2020)发现即使在温度低于-20℃时,液态水滴仍然可以存在云内。因此,基于温度确定的云相态存在较大的潜在误差。
尽管本文聚焦地基云遥感观测,而基于地基辐射波谱信息确定的云相态并不是热力学状态的云相态,因此这里还简单介绍了利用飞机原位观测的热力学云相态。当用飞机观测确定热力学云相态时,主要是基于云水和冰水含量或者云滴与冰晶数浓度进行确定。首先介绍云水和冰水含量的确定方法。当云水含量小于0.005 g·m-3,云为冰云。当云水含量不小于0.005 g·m-3,则判定云中含有水滴,云为混合云或水云,可以利用云水含量与总水含量的比值可以进一步区分混合云和水云:当该比值大于0.85时,云为水云,否 则 为 混 合 云(Field et al.,2004;McFarquhar et al.,2007;Dorsi et al.,2015;Zhao et al.,2020b)。另外一种就是基于云滴和冰晶数浓度的热力学云相态识别方法(McFarquhar and Cober,2004;Zhao et al.,2018b;Yang et al.,2019;Zhao et al.,2020b)。当云滴数浓度超过10 cm-3且冰晶数浓度小于0.11 L-1时,云为水云;当云滴数浓度超过10 cm-3且冰晶数浓度大于0.11 L-1时,云为混合云;当云滴数浓度小于10 cm-3且冰晶数浓度大于0.11 L-1时,云为冰云。注意当云滴数浓度小于10 cm-3且冰晶数浓度小于0.11 L-1时,云被判定为不存在。
在地基遥感当中,激光雷达退偏比也可以判断云的热力学相态,其方法主要是基于云中冰和水粒子形状的差异。云滴的形状为球形,退偏比趋近于0;冰晶形状复杂多变,包括柱状、盘状、针状等,其退偏比比云滴大的多。基于此可以利用激光雷达的退偏比信息设定阈值判断云中是否存在冰晶和云滴,从而确定云的相态(Wang and Sassen,2002;Mace and Protat,2018)。这里以Mace and Protat(2018)所用临界值为例:当雷达退偏比小于0.02时,云为水云;当雷达退偏比大于0.03时,云为冰云;当雷达退偏比介于0.02和0.03之间时,云为混合云。
随着对云观测仪器的发展和完善,现在很多综合观测站点同时拥有多个云观测仪器,基于多仪器结合判别云相态的方法也逐渐获得发展。Shupe等(2005)提出基于激光雷达回波信号、云雷达反射率、温度、退偏比等多项观测信息确定云相态的方法。第一步是基于激光雷达确定区分气溶胶和云层,从而判断获得云层信息,这与
2.1.2 节介绍的主动遥感云识别方法相一致。第二步结合激光雷达和云雷达识别所有水凝物结合体,利用激光雷达退偏比识别冰晶是否存在,基于临界值方法判断云相态(见上文)。第三步是利用云雷达反射率(Ze)、多普勒速度(VD)和温度(T)识别确定降水层结:当Ze>5 dBz且T<0℃,雪层存在;当Ze>5 dBz且T>0℃,雨层存在;当VD>2.5 m·s-1且T>0℃,雨层存在;其它情景为云层。第四步是基于温度的绝对相态规则判断:T<-40℃,云为冰云;T>0℃,云为水云。第五步是基于微波辐射计所测云水柱含量(Liquid Water Path,LWP)对温度介于-40℃与0℃之间云层的相态识别:如果LWP≤0 g·m-2,云层为冰云,如果LWP>25 g·m-2,云层含水,可能为水云或混合相态;如果LWP介于0与25 g·m-2之间,则相态不确定。第六步是根据前后多个时间观测或者周边多个点位观测进行比对进一步确定未识别云相态:采纳所用多个时间段(如1 h内的多个观测)或多个点位(小范围空间内的多个点位)的主导云相态为云的整体相态。整个相态确定流程执行下来,绝大多数云层的相态都可以给予识别确定。
2.4 云微观特征地基遥感反演
不同于飞机原位观测,云微观特征的地基遥感反演主要是利用遥感观测量与云微观特征的内在联系来进行反推。基于遥感方式的不同,云微观特征地基遥感可以分为被动遥感和主动遥感。然而基于遥感反演方式的不同,绝大多数的地基云微观特征遥感反演方法大致可以分为两类,一类为经验公式法(Empirical Regression Algorithm,ERA),一类为观测与理论或者模式计算相比较的最优解方法(Optimal Re⁃trieval Algorithm,ORA)。下面分别对两种方法进行论述。
2.4.1 ERA方法
经验公式ERA方法是发展最早也是最为简单的云微观特征遥感反演方法,其基本思想是利用直接观测数据构建云微观特征与观测变量之间的拟合关系,并将该关系应用到某一类型或者所有类型的云特征遥感反演之中。目前使用较多的拟合关系大体可以分为三类:云微观特征与雷达反照率之间的拟合关系,云微观特征与温度之间的拟合关系,云微观特征与雷达多普勒速度、雷达反照率、温度、激光雷达消光系数或后向散射系数等多个观测量之间的拟合关系。下面对这些ERA方法逐一介绍。
最为简单的ERA方法是云微观特征与温度之间的拟合关系。国际上现有方法中主要包括美国能源部ARM计划基准产品MICROBASE(Zhao et al.,2012b)中对于冰晶有效半径的经验反演方法和欧洲Cloudnet观测所用绝热假设情景下基于绝热假设利用温度和湿度廓线结合微波辐射计LWP校正对云水含量的反演方法。MICROBASE是利用Ivanova等(2001)基于短暂飞机观测所构建的经验拟合公式

其中re_ice是冰晶有效半径,T是云中温度(单位:℃)。该拟合公式被MICROBASE产品应用到了高、中、低纬度的地面站点观测冰云有效半径特征遥感反演之中。考虑到该关系式是基于有限的飞机观测获得,可以预期该ERA方法必然会导致反演结果具有较大的不确定性。事实上,考虑到冰晶存在的最大温度为0℃,基于该经验公式反演获得的冰晶有效半径最大值为37.7μm,显著小于实际飞机观测中所确定的云冰晶有效半径范围。Cloudnet产品是基于温度廓线(来自再分析气象场、探空廓线等)利用绝热假设推导求导云中云水含量,是一种基于温度廓线和绝热假设的另一类ERA反演方法。其具体思想是假定云底处水汽处于饱和状态,云水含量为0 g·m-3,从云底到云顶随着温度的降低,绝热冷却过程将水汽转化为云水,利用绝热过程就可以基于温度变化计算得出云水含量(Hogan et al.,2006)。
使用较为广泛的ERA方法是云微观特征与云雷达反照率之间的拟合关系,通常构建的关系如下

其中,IWC和re_ice为冰云的冰水含量(单位:g·m-3)和有效半径(单位:μm),LWC和re_liq分别为水云的液态水含量(单位:g·m-3)和有效半径(单位:μm),Ze为雷达反照率(单位:mm6·m-3),a和b分别为经验参数。表3给出了现有的地基遥感ERA方法及其所使用的经验参数数值。

表3 现有地基遥感ERA方法云微物理反演经验参数Table 3 The empirical parameters used in the ground-based cloud retrieval ERA algorithms.
相对于单一观测变量的ERA云遥感反演方法,基于多个观测变量的ERA云遥感反演方法具有更高的反演精度,逐渐被更多的地基遥感反演方法所使用。表4给出了现有使用多个观测变量的地基遥感ERA方法及其所用经验公式。这些ERA反演方法用到更多的反演参量(或统计信息),其结果也往往更为准确一些。

表4 多观测变量地基遥感ERA方法经验公式Table 4 Ground-based ERA retrieval algorithms that are based on multiple variables.
2.4.2 ORA方法
最优解ORA方法是比对辐射传输模式计算或者雷达前向模型模拟与遥感观测达到最优时对应的云微观特征遥感反演方法。该方法主要是应用于基于辐射波谱观测的云遥感反演方法。这里以Garrett和Zhao(2013)提出的ORA云遥感反演方法为例,来说明ORA云遥感反演方法的基本思想。图6给出了Garrett和Zhao(2013)所用ORA云遥感反演的基本思路。该类方法一般是先基于辐射传输模式(如DISORT辐射传输模式)或者前向模型(如雷达反照率计算模型)计算不同云特征组合(如云滴有效半径与光学厚度的不同组合)情景下的云辐射系数、反射系数、传输系数或者雷达反照率等,从而构建基于这些模式或模型计算的对照表。第二步一般是基于地基遥感观测计算与对照表波段相对应的云辐射系数、反射系数、传输系数或者雷达反照率等。第三步是将观测值与模式或模型计算的对照表进行比对,利用数学统计方法获得最优解,该最优解为所观测云的微观特征组合(如云滴有效半径和光学厚度)。最后,基于云物理特征的理论知识和反演所得云微观特征组合,进一步计算得出其它相关云微物理量,如云水含量和云滴数浓度等。

图6 最优解ORA地基云遥感反演方法流程示意例图(引自Garrett and Zhao,2013)Fig.6 A case illustration about the flow chart of ground-based optimal retrieval algorithm ORA(Adopted from Garrett and Zhao,2013).
2.4.3 遥感反演方法结果差异

图7 美国能源部大气辐射观测计划9种云遥感反演产品之间的显著差异(注意共有5个站点,每个站点分别有3~6个云反演产品,引自Zhao et al.,2012b)Fig.7 The Taylor diagrams for differences of cloud retrievals among 9 products from U.S.DOE ARM program(Note that there are 5 ground stations,with 3-6 cloud retrieval products at each ground station.Adopted from Zhao et al.,2012b).
尽管到目前为止,国际上已经出现了数十种云遥感反演方法,然而各个云遥感反演方法所获得的云特征参数之间存在巨大差异(Huang et al.,2012;Zhao et al.,2012b)。Zhao等(2012b)比对了美国能源部ARM计划的九种云遥感反演产品,发现云遥感反演产品之间存在显著的差别,这种差别甚至远远超过了云遥感反演方法本身的反演误差。图7给出了Zhao等(2012b)多种云遥感反演产品比对的结果,从中可以看出各个云遥感反演产品之间的差距可以超过100%,且几乎是对于所有不同云遥感观测物理量都存在严重差异。值得一提的是各个产品在冰水含量与冰晶有半径上的相关性要大于在云水含量和云滴有效半径之间的相关性,然而这并不意味着冰晶特征的反演更为准确;造成这一现象的主要原因是几乎所有冰晶微物理特征的遥感反演采用的都是基于云雷达反照率的经验参数ERA遥感反演方法,这使得各个产品间存在相对较好的相关性。与之不同的是,云水含量与云滴有效半径的遥感反演方法既包括ERA也包括ORA云遥感反演方法,它们反演结果间的相关性较弱。实际上,经过系统性分析,Huang等(2012)和Zhao等(2012b)都揭示了造成云遥感反演产品之间显著差异的原因,即云遥感反演方法所用的理论差异、所用假设的不同、所用参数的差异及所用观测数据的不同。即使用基于云雷达反照率的ERA云遥感反演方法,所用参数的不同可以导致反演结果差异达到近100%。图8给出了另一个典型例子,同样来自Zhao等(2012b),从中可以看到地基云遥感反演方法的不同甚至可以导致截然相反的发现。图8中显示了2004年5—11月美国SGP站点三种云遥感反演产品中云水含量的平均廓线分布:美国能源部ARM计划基准产品MICROBASE显示云水含量随高度变化缓慢,略有减少趋势;美国犹他大学Gerald Mace产品显示云水含量在1 100 m以下随高度增加,1 100 m以上呈现随高度减小趋势;而欧洲Cloudnet产品显示云水含量随高度总体呈现增加趋势。这种不同的发现与云反演方法所用的理论基础有着直接的关系:MICROBASE和MACE中LWC均是采用基于云雷达反射率的ERA经验参数法,其垂直变化变化规律与云雷达反射率的垂直变化规律相一致;Cloudnet采用的是基于温度廓线的绝热假设计算,其垂直变化规律与温度垂直变化成反比关系。这些云产品之间的显著差异说明在使用地基云遥感反演产品时,一定要理解所用云产品遥感反演方法的理论基础是什么,基于什么样的假设,采用了什么样的经验参数,适用于什么类型的云和什么样的气象条件,对云变量的遥感反演会有哪些可能的偏差等。只有充分理解所用云遥感反演方法,才能合理有效的在科学研究中使用这些云遥感反演产品。

图8 美国南部大平原站点3种水云云遥感反演产品云水含量(LWC)在2004年5—11月平均廓线分布(引自Zhao et al.,2012b)Fig.8 The profiles of liquid water content(LWC)averaged for the period from May to November in 2004 at the Southern Great Plain site in US(The red,orange and blue lines are for LWCs from three different retrieval products,which are described in detail in Zhao et al.,2012b).
3 结论
(1)云的地基遥感观测和反演方法在20世纪80—90年代之后得到快速发展,出现了一系列的主动遥感和被动遥感观测仪器,各国开展了长时间序列的地基云观测计划,较为著名的包括美国能源部的大气辐射观测计划(观测时间已经持续约30 a)以及欧洲的Cloudnet观测网络。我国也在2000年以后陆续在河北香河、甘肃兰州、安徽合肥等地构建了多个大气观测站点,开始了长期连续云观测,研究云的宏微观和时空变化特征。
(2)根据遥感仪器获取信息的方式,云地基遥感观测仪器包括主动遥感(如云雷达和微脉冲激光雷达等)以及被动遥感仪器(如大气辐射干涉仪、微波辐射计和全天空成像仪等)。云的宏观特征包括云量、云边界和云相态等。云量与云的识别方法相对应。云的识别方法包括被动遥感方法、主动遥感方法和探空廓线识别方法。相对而言,被动遥感方法和主动遥感方法持续时间远大于探空廓线识别方法,而主动遥感方法探测精度又远大于被动遥感方法。云边界的确定主要依靠主动遥感方法,尽管探空廓线也可以给出边界信息。对于主动遥感探测云边界而言,激光雷达探测云底高度具有高分辨率优势但由于信号衰减迅速在云顶探测上误差很大,云雷达具有很强的穿透能力从而在云顶高度和云层数的探测上具有较大优势,但由于垂直分辨率较大以及无法区分云和降水而在云底探测上具有较大误差。云相态的确定主要基于云水和云冰的复折射因子差异、形成温度差异、粒子形状差异等,可以简单根据所用地基遥感观测数据的差异概括为四种方法,分别为基于辐射波谱、温度、雷达退偏比和多仪器综合的方法。基于辐射波谱确定云相态方法的理论基础是冰水复折射指数的差异,所形成的相态信息为辐射相态信息;基于温度和雷达退偏比(粒子形状)确定的云相态多热力学相态。目前更为准确的云相态判别方法多是综合利用多源观测数据信息构建。
(3)云微观特征包括云粒径谱、云滴有效半径、云冰晶有效半径、云水含量和冰水含量等。地基云微观特征遥感反演方法主要包括经验参数方法和最优解方法。经验参数方法主要是基于理论认知和有限的飞机或地面观测数据构建形成,反演方法简单快速,但不同类型的云和不同动力条件下形成的云利用经验参数进行云微物理特征反演往往误差较大,需要细致的聚类。最优解方法多是通将遥感观测与辐射传输模式计算或者雷达前向模型模拟结果相匹配使之达到最优时对应的云微观特征遥感反演方法,其运算量相对较大、反演结果相对准确。
(4)基于这些云遥感观测技术和云遥感反演方法,全球很多站点均获取了云物理变量的地基遥感反演产品,其中以美国ARM和欧洲Cloudnet比较著名。这些地基遥感反演产品也获得了广泛的应用,包括对卫星云遥感反演产品和模式中云模拟结果的评估和诊断,对局地云日变化、季节变化、年际变化甚至年代际变化特征的揭示,对云发生、发展和消散过程的理解,以及对气溶胶-云降水-辐射相互作用规律的探讨等。然而,云遥感反演产品精度受云遥感反演方法本身的影响较为显著,不同云遥感反演方法给出的云宏微观特性间还存在着很大的差异,这为合理有效的使用云遥感反演产品造成了困扰和阻碍。由于云遥感反演产品的结果严重依赖遥感反演方法的理论基础、假设条件、参数选取和输入数据,可靠的应用云遥感反演产品就需要用户理解所用云反演产品的相关背景、适用条件和潜在偏差。
4 地基云遥感面临的问题和挑战
相比于卫星云遥感观测,地基云遥感不受下垫面的影响,具有较高的观测和反演精度常作为参考值对卫星云遥感反演和模式模拟结果进行质量评价和评估;伴随着云物理学和地球系统模式的发展对地基云遥感产品精度的要求不断提高,地基云遥感面临着许多问题和挑战。概括说来,可以分为两大部分:一是新型遥感仪器的研发和构建;二是云遥感反演技术的进一步完善和改进。
(1)对于新型遥感观测仪器,最近10多年发展相对比较缓慢,但也出现了一些突破。目前出现的多频云和降水雷达、扫描云雷达等,为观测云提供了新的观测手段,也能进一步促进云特征遥感反演技术的提升。比如说,扫描云雷达的使用可以获取云的冰晶形状信息和云的多维结构,从而提高对云粒径谱分布、下落速度以及目前用于云反演的一些假设的认识。同样,更高精度的波谱信息和拉曼激光雷达回波信息也提高了对云观测的敏感度。其它仪器,诸如微波辐射计获取更高分辨率、更高精度的辐射波谱信息同样会促进云地基遥感的进一步发展。当然,相对于国际地基云遥感观测仪器,我国要相对比较落后。事实上,直到2000年以后我国才研发了毫米波云雷达。然而,随着我国在硬件技术上逐渐达到国际先进水平,我国在地基和卫星云遥感反演技术上也逐渐达到国际水平。未来的地基云遥感领域要取得进一步发展,很大程度上取决于更强大、准确、可靠新型仪器的研发。总结而言,国际上在地基云遥感观测仪器上的发展方向主要体现在三个层面:多频,多角度,高时间分辨率、空间分辨率和信号分辨率,比如双频云雷达、三位扫描云雷达等的研制。综合利用多传感器观测、融合同化多源观测数据、同步获得云特征的多个参数,也是目前国际在地基云遥感领域的重要发展方向。另外,与新型仪器相对应,对仪器所测图像的更为强大的处理过程、处理方法和处理软件同样是未来发展的一个方向和挑战。
(2)与新型观测仪器相对应,云遥感反演方法的改进和提升同样是未来一大挑战。首先,对于最优解方法而言,需要提高和发展合适的前向模型来模拟和诊断新型观测仪器的探测精度,从而基于前向模型和仪器观测获取更为准确的云宏微观特征。例如,云在微波波段的吸收与温度密切相关,而现有的云雷达所对应的前向模式和辐射波谱对应的辐射传输模式(相当于前向模式)在计算中还未充分考虑这一点,需要在未来构建前向模型中给予更好的处理。其次,对于经验参数方法来说,需要采集更多、更准、更具有不同情景代表性的观测数据,通过分型处理构建更为合理、更为准确、更为细致的经验参数,从而提高云遥感反演产品精度。最后,高精度的仪器观测和反演方法是获取高质量云宏微观特征的前提,需要提升对各种现有地基遥感仪器和反演方法原理和误差来源的认知;开展不确定性量化方法研究,包括与飞机观测的比对、在观测误差范围随机扰动遥感反演关键因子的扰动集成、辐射闭合实验、观测系统模拟实验等,为遥感观测仪器的研发和反演方法的改进明确方向。
无论是新型观测仪器的研发,还是遥感反演方法的进一步发展,都需要进一步理解云的发展机理和现有云遥感观测和反演方法的局限性,也都将促进云观测质量的进一步提升,为未来理解云发生发展过程、改进云模式模拟,从而提高天气和气候预测提供最为重要的观测数据支撑。
