区域导航系统站间时间同步野值剔除方法研究
2021-05-20黄颖涛
黄颖涛
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
在区域导航系统中,基准站站间时间同步是系统自主运行的基础,时间同步精度也是导航系统实现高精度测量、定位与导航的前提。目前,较为常用的无线电技术是采用双向时间比对方法,即利用基准站间时延测量信号的相互播发与接收,通过同时刻双向时延测量值比对来实现高精度时间同步。但该方法在远距离无线动态下,特别是在高动态条件下,因受站间无线通信手段的限制,不能及时获得同时刻的比对数据,使时差测量值出现突跳,这将会导致时间频率跟踪环路波动,且动态越大,带来的波动越大,严重影响到基准站间的时间同步性能。因此需要在实时获取基准站间时钟基准偏差测量值的基础上,进行时差野值的判断、剔除以及时差滤波处理,从而实现站间的高精度时间同步建立和维持。
1 双向时间比对方法
双向时间比对设备通过无线电交换时间同步信号,如果这个无线电通信链路是对称的或者近似对称的,那么双向信号传输的延迟将得到很好的对消,这就是双向时间比对系统所依据的基本原理。双向时间比对原理如图1所示。
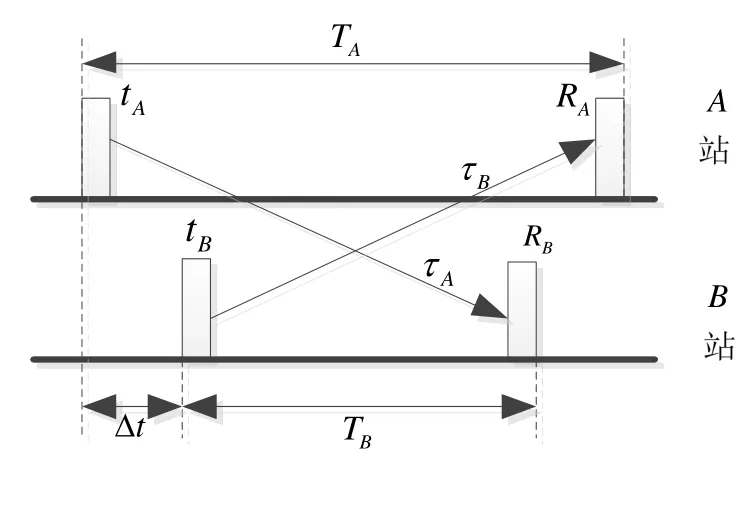
图1 双向时间比对原理示意图
如图1所示,Δt为A、B两站时差,A、B两站发射设备与接收设备的时延分别为(tA,RA)和(tB,RB),A站到B站路径传播时延为τ A,B站到A站路径传播时延为τ B,则两计数器测量值分别为:
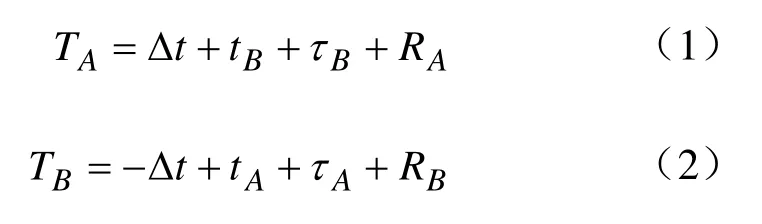
因为A、B两站站间的空间传播路径相同,即τA=τB。联立式(1)和式(2)得:

式中,(tA,RA)和(tB,RB)是设备的硬件时延,可以通过事先标定得到,计数器测量值已知,因此可得到两站的时差值Δt。从基准站即可依据时差Δt调整本地的时间,保持与主基准站的时间同步。
2 区域导航站间时间同步时差计算
基于双向时间比对,系统间导航基准站播发和接收设备硬件时延固定和站间两个收发天线之间距离相同,通过从基准站与主基准站之间区域导航信号传播时延的相互测量,建立双向比对时差测量模型。假设主基准站为A,从基准站为B,则有:
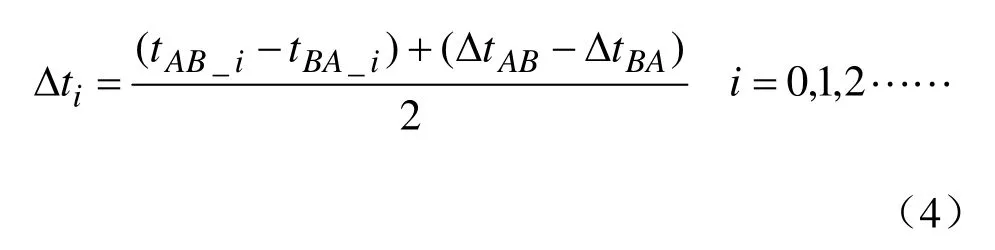
式中,Δti为i时刻从基准站与主基准站的时差值;ΔtAB为主基准站A发射和从基准站B接收之间的硬件时延;ΔtBA为从基准站B发射和主基准站A接收之间的硬件时延;tAB_i和tBA_i分别为在当前i时刻,主基准站A和从基准站B之间导航信号互相收发的传播时延。
在动态实时同步过程中,会因各种突变因素带来由测量数据突跳产生的时差值野值,若不剔除,会严重影响到时间同步性能。
3 时差野值剔除及滤波方法
在静态情况下,站间时间同步相对稳定,而动态情况下,由于站间实时数据的获取会有延迟,所以实时数据野值剔除分为两步,即先需要对观测数据进行外推预测,然后再进行野值的判断及剔除。
对时差值的外推预测方法采用五点线性预测法,即通过当前时刻i及前4 s 的时差值对下一时刻i+1 的时差值进行预测,预测公式为:
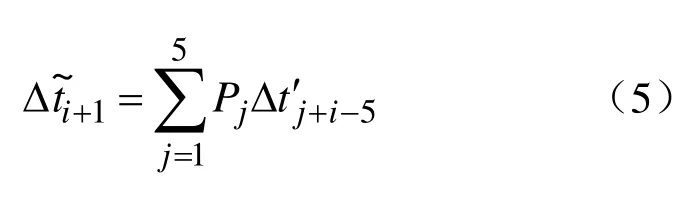
式中,系数权重Pj=(3j-7)/10;为时差值预测值。
在野值剔除过程中,设定其判决门限值M,将i时刻的时差测量计算值Δti与时差预测值作比较,若其差值小于判决门限M,则可判断此时差测量计算值Δti有效可用,将其送入滤波器作后续处理,否则此时刻将采用时差五点线性预测值。具体判决过程如下:

式中,为预测时刻前连续5 s 的时差平均值,判断门限取值选为其均方根σi的3 倍。
在将野值剔除后得到的时差值送时钟频率锁定环路之前,为保障时差值的平稳性,需对时差值进行线性滤波处理,将滤波处理后的时差值送入时钟频率锁定环路,达到时间同步的高精度维持。滤波处理方法如式(8)所示:

式中,Δti_r为i时刻经过野值处理后的时差值;为i时刻经过滤波处理后送入时钟频率锁定环路的时差值,且=0。
4 试验验证
利用区域导航系统设备,进行外场试验,试验场景为主基准站A固定在经度为114.465878°,维度为31.11754°,高度为65.44 m 的位置,从基准站B安放在船艇上,在远离主站约1 km 的湖面上运动,运动轨迹如图2所示。
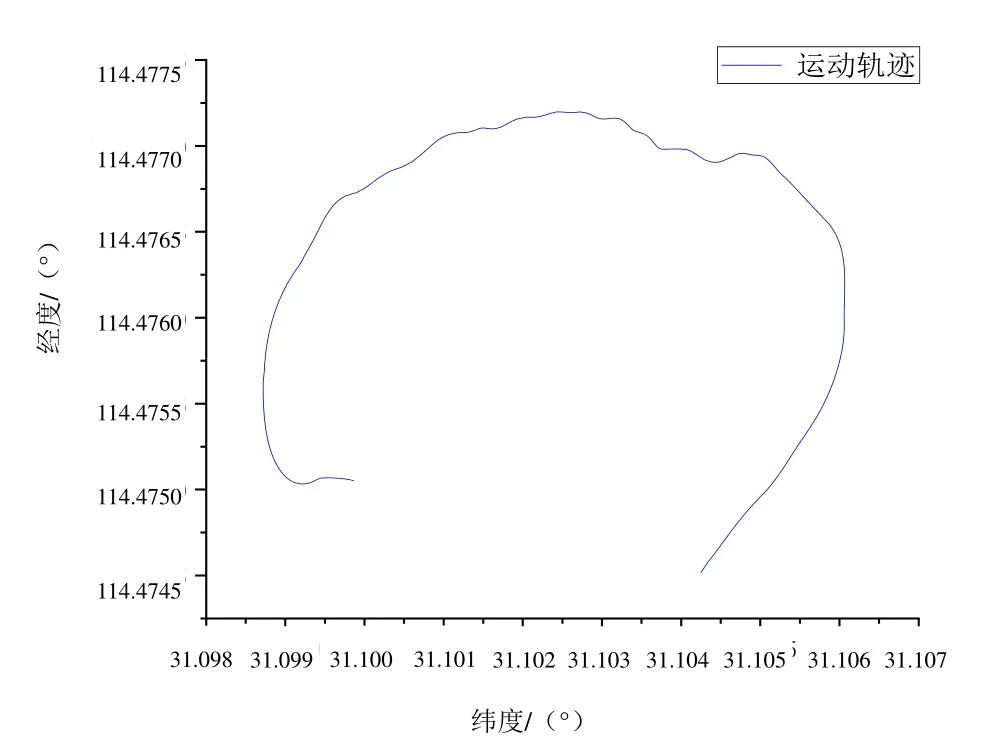
图2 基准站B 运动轨迹
对于试验过程中时差值的采集记录为1 s/次,针对外场试验中采集的时间同步时差值数据作如下分析:在从基准站B动态过程中,与主基准站A作时间同步,时间同步维持过程中未经处理的秒差值记录数据如图3所示。
从图3中可以看出,基准站B在动态状况下,时差值趋势在+5 ns 和-5 ns 之间波动,由于基准站B被放置在汽艇上在湖面运动,在汽艇转弯过程中,由于湖面的波动及接收天线的角度变化,会出现因测距值突跳带来的时差野值,若不剔除,直接送入时钟频率锁定环路,则会影响时间同步的稳定性,进而影响到基准站之间的测距。
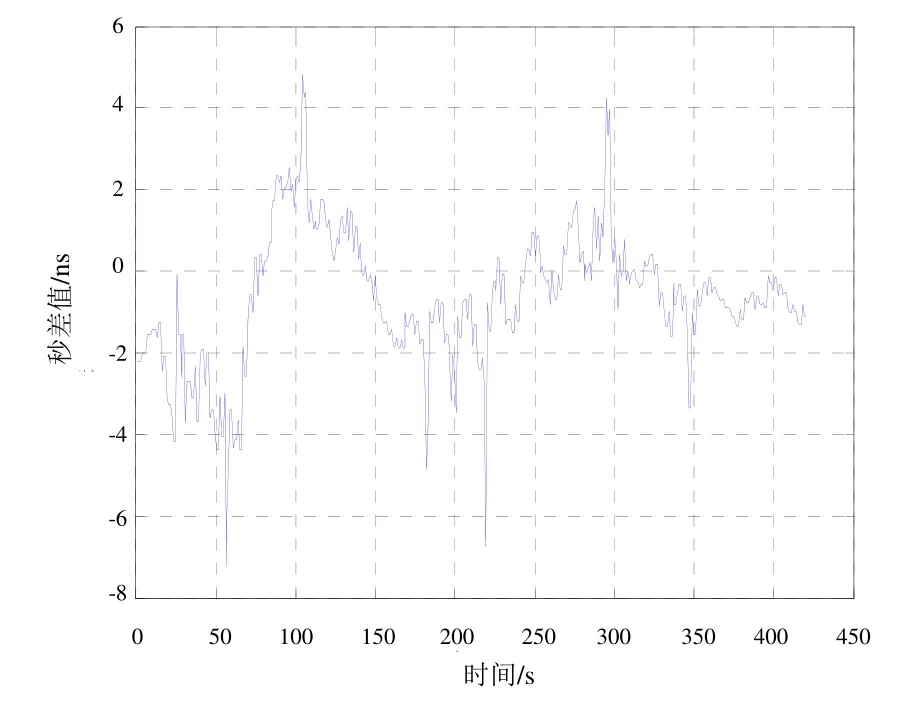
图3 时间同步未经处理的时差值
在时差值数据采集的过程中,通过五点线性预测法对实时的时差值进行预测,可得到时差值的预测值,如图4所示。
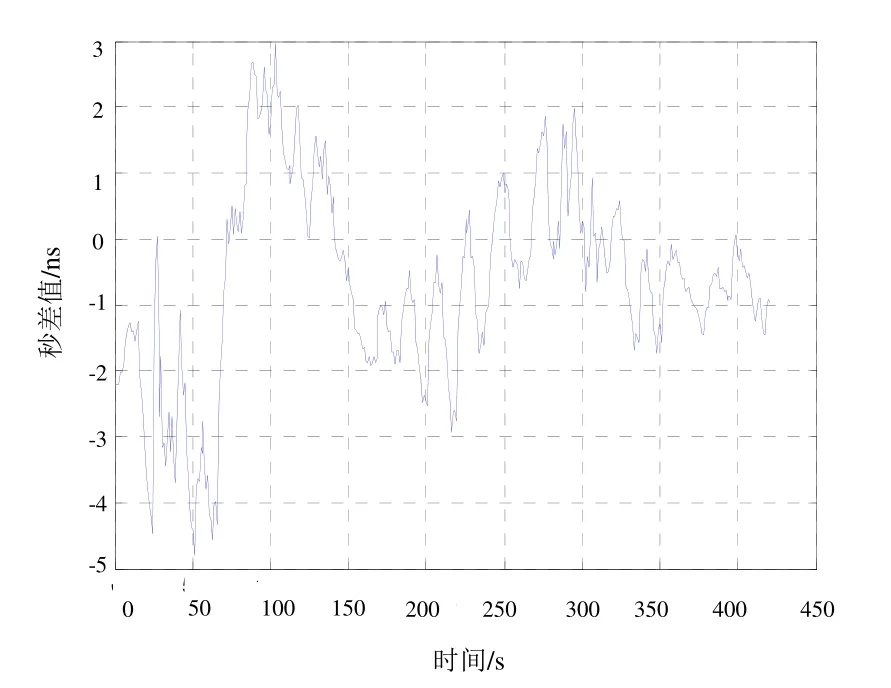
图4 时间同步时差值的预测值
从图4中可以看出,在基准站B动态过程中,时差值的预测值趋势与未经处理的时差值大体相同,在-5 ns 和+3 ns 之间波动,没有出现野值点。将时差值原始数据与预测值作对比分析,如图5所示。
通过时差野值剔除的判决公式,可得到原始时差值与预测值的偏差值与判决门限值的关系,如图5所示,图中虚线为判决门限值,实线为偏差值,从图5中可以看出,有几处的偏差值大幅度超过判决门限值,并从局部图6中可明显看出偏差值与判决门限值的关系。根据判决准则,测量时差值将会被作为野值进行剔除,并将预测值作为当前时刻的时差值输入线性滤波器中作处理,并将处理结果送到时钟锁定频率环路中,最终处理结果如图7所示,最终处理后的时差值维持了时差值原有趋势,并有效剔除了检测出的野值点。
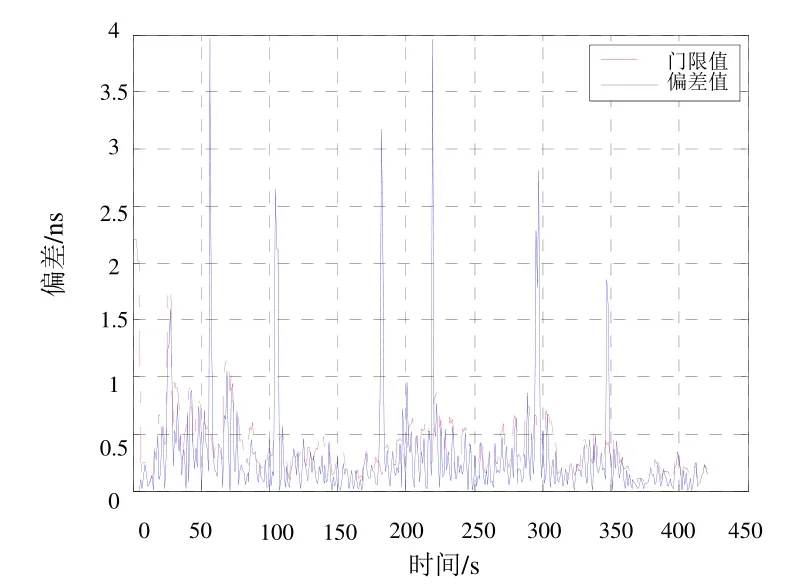
图5 时差值与预测值的偏差及门限值
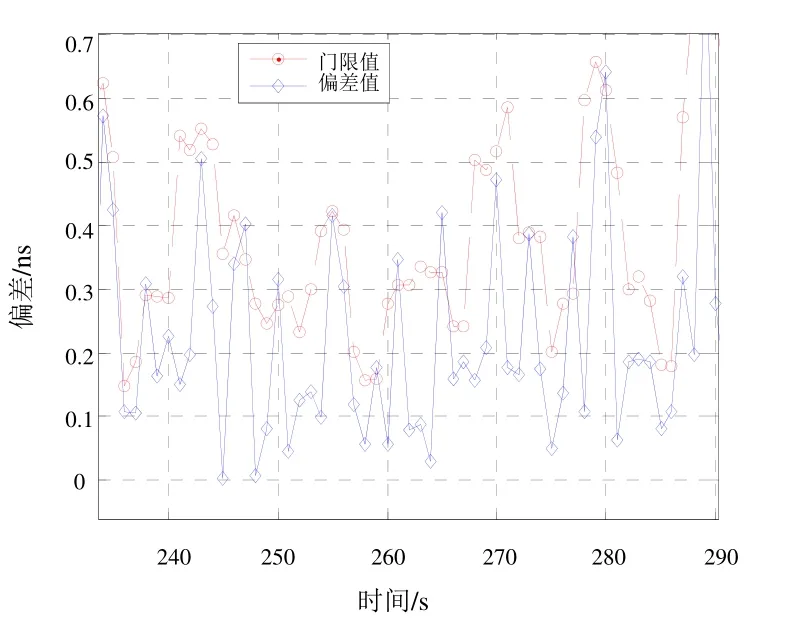
图6 时差值与预测值的偏差及门限值(局部图)
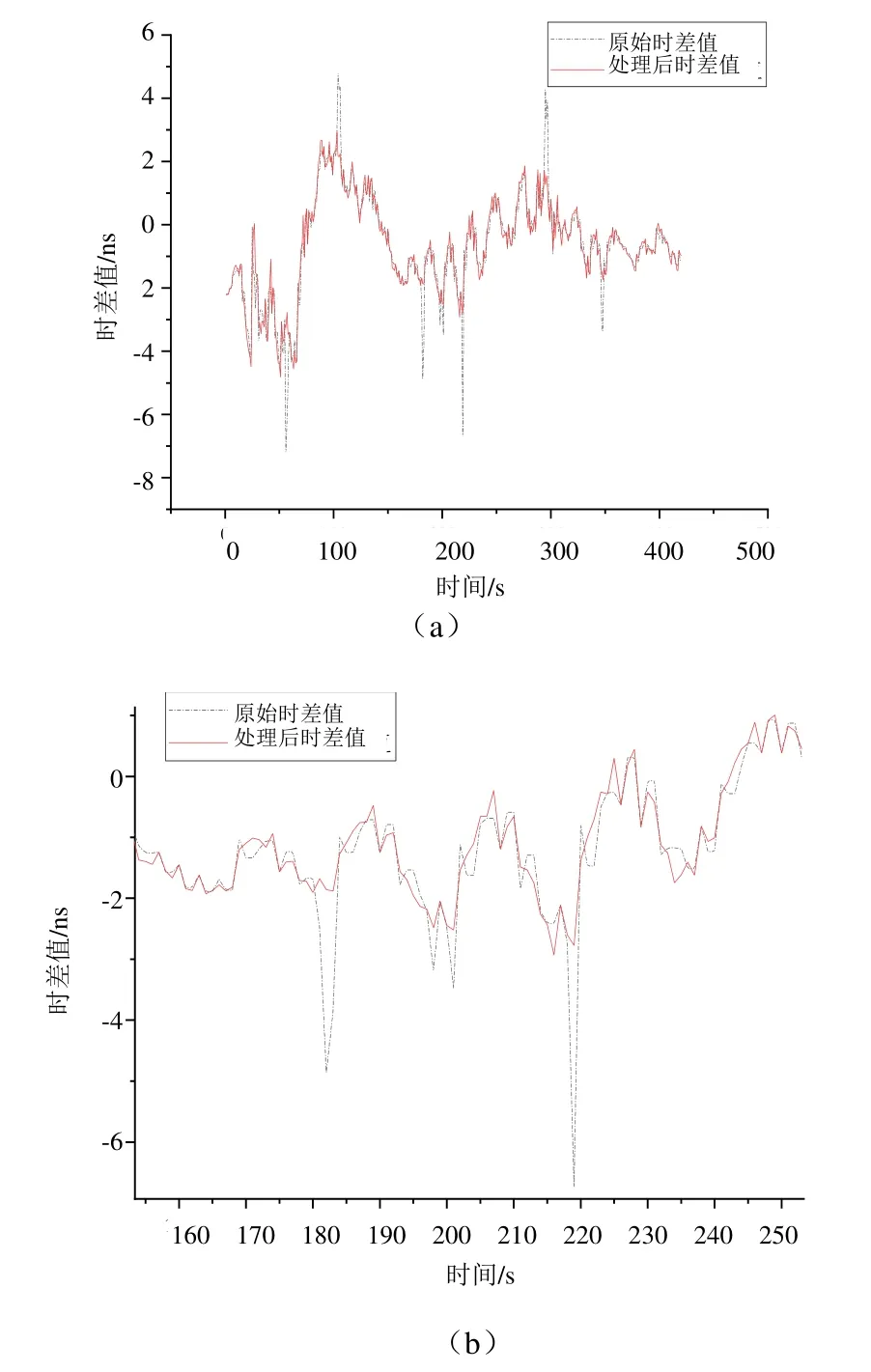
图7 原始时差值与处理后的时差值
5 结语
在区域导航系统的时间同步中,高动态下时差值野值的出现会影响时间同步的精度,进而影响系统运行的稳定性。本文针对这一问题,提出一种时差值野值判断剔除方法,利用实时的时差值数据进行预测和设置自适应判决门限,并对野值进行判断并剔除。通过试验验证,该方法能够有效地对时差野值进行判断并剔除,保障了系统基准站站间时间同步的精度。
