惯导RTK倾斜测量精度评定
2021-05-20韦洪昌王德丰
韦洪昌,王德丰
(湖南省有色地质勘查局二四五队,湖南 吉首 416000)
惯导RTK倾斜改正系统称IMU惯性导航传感系统,其主要利用陀螺仪和加速度计测量倾斜方向和角度,从而能自动进行倾斜角与方位角的倾斜补偿[1]。惯导RTK移动站在测量过程中,对中杆无需扶直,IMU系统能够快速测量出对中杆倾斜的角度与方向,并实时进行补偿校正,获取对中杆扶直状态下的地面点坐标,可提高流动站测量作业效率[2]。
IMU倾斜测量精度有限,其精度的高低直接影响测量结果的精度。为评定其测量精度,下面对同一个点在不同倾斜角度和方向下进行测量,对比分析其测量精度。
1 实验方案
1.1 惯导RTK倾斜改正的基本原理
RTK第一代倾斜测量是基于电子罗盘或磁力计地磁解算,而引起磁场变化的因素很多,如高压线,变压器,发射站及多金属的地方这些会对倾斜校正值有影响导致测量结果不可控,可信度降低。现期在惯导RTK中出现了新的倾斜改正技术,属于二代倾斜测量[3]。倾斜角度的测量主要是利用陀螺仪和加速度计两种传感器。陀螺仪对角速度积分的方法计算出方向上倾斜角度,加速度计是利用重力加速度和其轴线上的矢量分量之间的三角函数关系计算出倾斜的角度。融合两者生成的新的惯性导航传感系统IMU[4]。通过IMU惯性导航传感器能自动进行倾斜角与方位角的倾斜补偿,在测量过程中,移动站对中杆无需绝对扶直,惯性导航传感器能够快速计算出对中杆倾斜的角度与方向,并及时进行补偿校正获取地面点水平方向的坐标值,故基于惯导技术的倾斜改正方法克服了通过地磁解算进行倾斜改正的受地磁及附近金属构筑物影响的缺陷,且无需每次测量校正,可提高流动站测量作业效率。
如图1,惯导RTK在测量时,其对中杆在任意方向上倾斜,对中杆倾斜角为θ,对中杆的方位角为α,对中杆长度为L,GNSS接收机相位中心的坐标为(x′、y′、h′),则对中杆底部坐标(x、y、h)为:
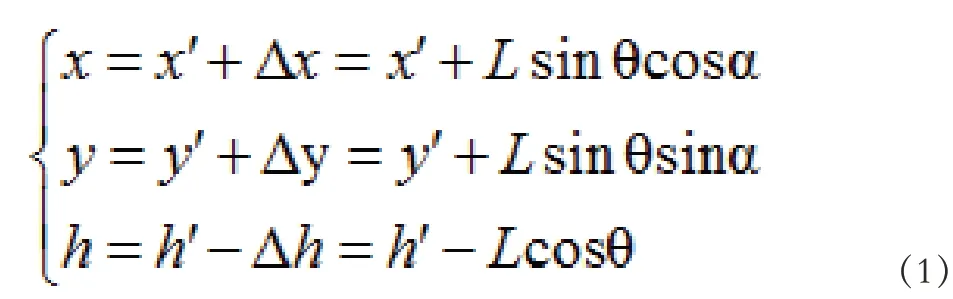
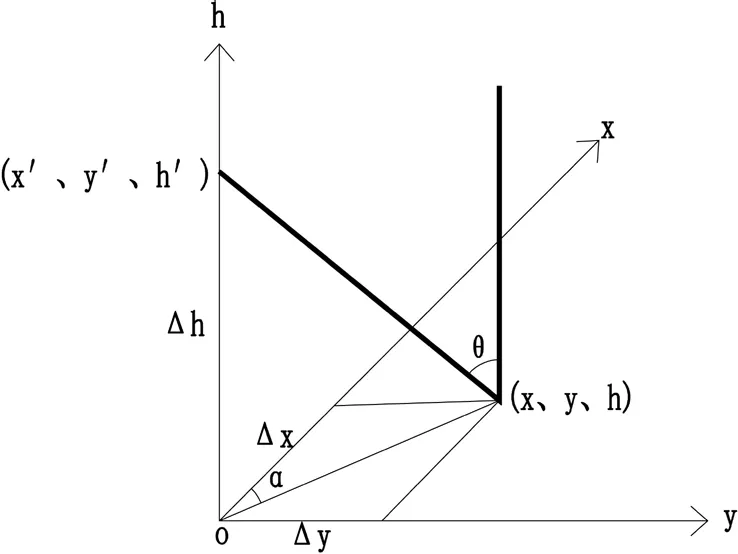
图1 惯导RTK倾斜改正的基本原理
从式(1)可知,倾斜改正的平面精度受对中杆的倾斜角θ及对中杆的方位角α影响,高程精度受对中杆的倾斜角θ影响。
1.2 实验方法
本次实验使用的惯导RTK允许的最大倾斜角度为45°,建议倾斜角度小于30°。
选择视野开阔、地势平坦的区域作为实验场地,以场地经度109°40′50.42″为中央子午线,在场地内不同的两个位置打入带十字丝的钢钉作为测量标志,设该2点点号分别为A1、A2。将对中杆立于十字丝中心上,对中杆分别向方位角为 0°、90°、180°、270°的方向进行倾斜,每个方向均在倾斜角度分别为0°、10°、20°、30°、40°时进行测量,测量采样时间为10s,采样间隔为1s。以倾斜角为0°时测量的坐标为基准,在不同倾斜角度下测量的坐标的偏差进行精度评定。
2 倾斜测量
架设基准站及移动站,对A1、A2进行测量,对中杆分别向方位角为 0°、90°、180°、270°的方向进行倾斜,每个方向均在倾斜角度分别为0°、 10°、20°、30°、40°时进行测量。测量采样时间为10s,采样间隔为1s。A1、A2各状态下测量的坐标值及与对中杆倾斜 0°作为基准坐标偏差见表 1及表2。
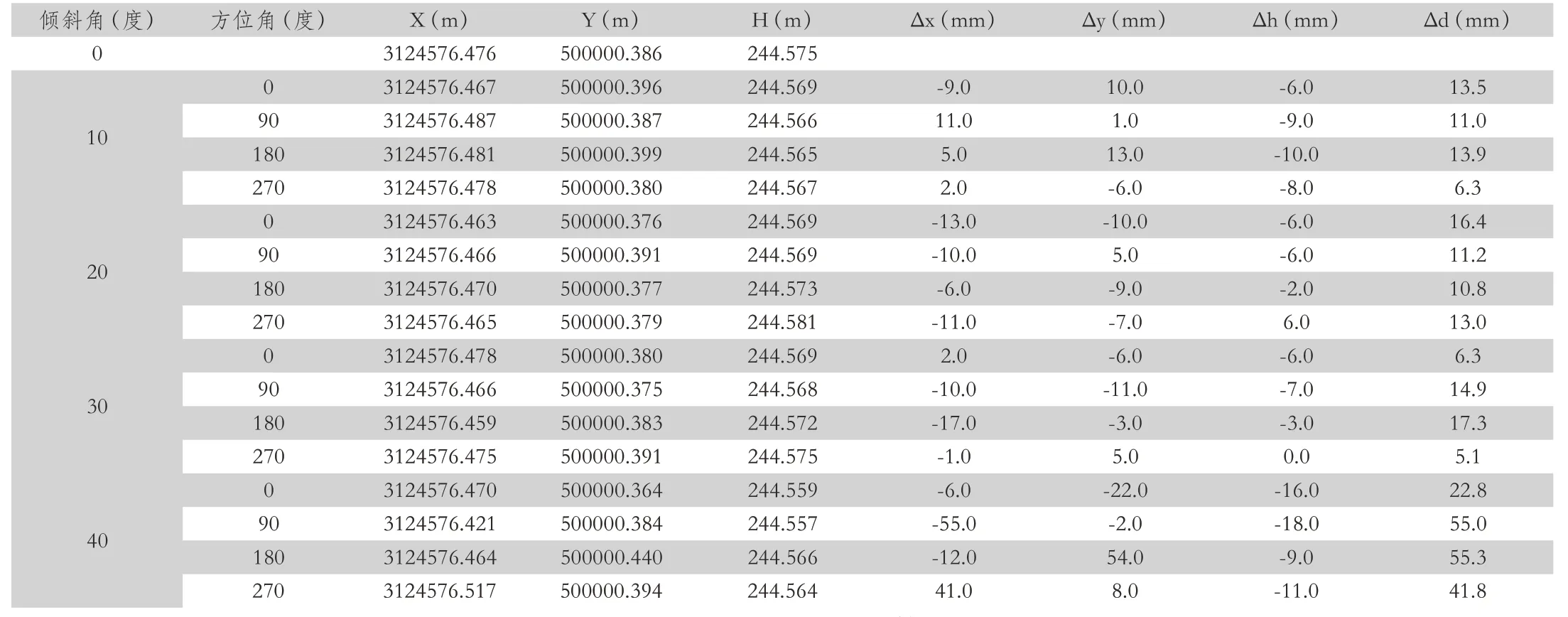
表1 A1号点测量值及计算值
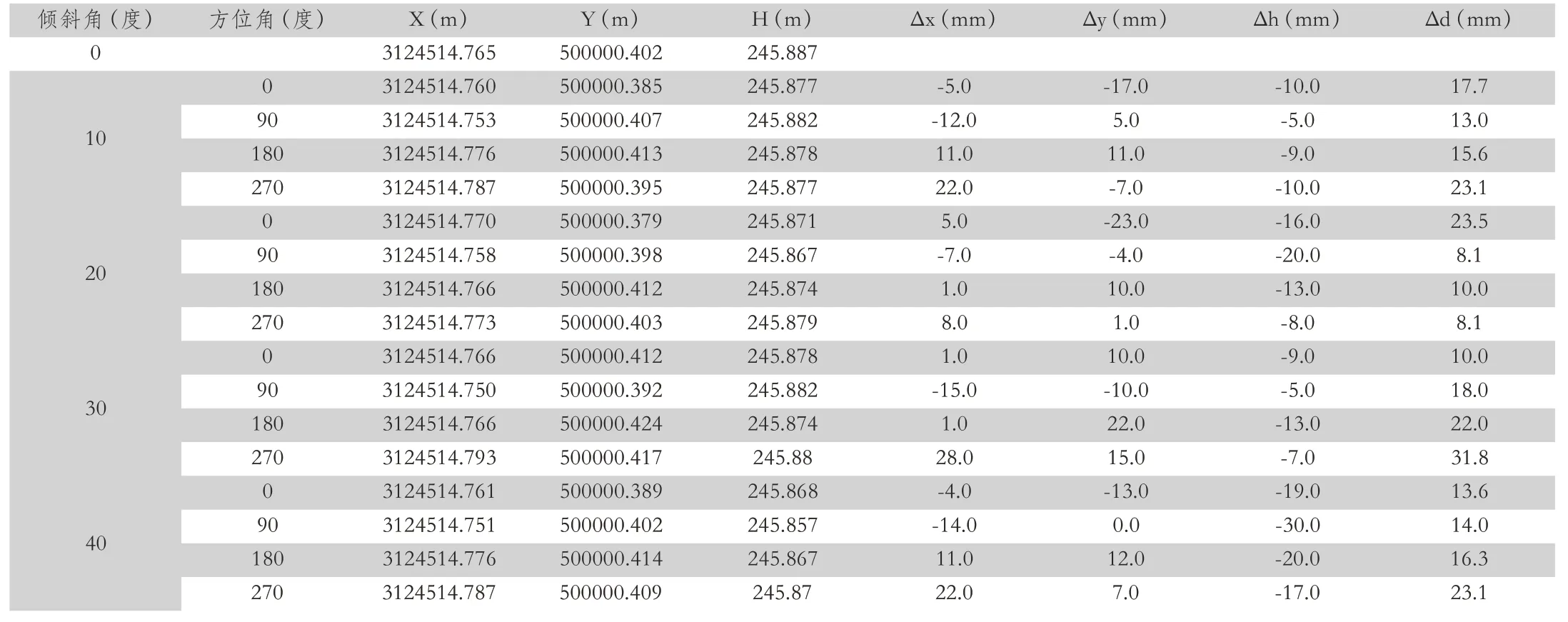
表2 A2号点测量值及计算值
3 精度评定
3.1 平面精度
分析表1及表2可知:
(1)在不同方位角上倾斜角度小于30°时,测量的点位偏差最大的为31.8mm,满足RTK规范要求的≤±50mm。同时,在倾斜角小于30°情况下,A1、A2的平均点位偏差分别为11.6mm和16.7㎜。说明在倾斜角度为0°~30°时,惯导RTK的倾斜补偿精度可靠,与RTK固有误差接近[5]。同时,对中杆向不同方位角倾斜同一角度下的测量精度较均匀。
(2)在倾斜角度为40°时,个别点位偏差超过了RTK规范要求的≤±50mm,达到55.3mm。说明在倾斜角度大于30°时,随着倾斜角度的增大,惯导RTK的倾斜补偿精度有所降低,个别点不满足规范要求。
3.2 高程精度
通过表1及表2可知,在0°~40°的倾斜角度下,最大高程偏差≤30mm,平均高程偏差10.4mm。说明在倾斜角小于40°时,惯导RTK的倾斜补偿精度对高程影响较小。
4 小结
通过对惯导RTK的精度评定可知:在仪器建议的最大倾斜角30°内,平面误差及高程误差与RTK固有误差接近,满足规范要求的≤±50mm;在倾斜角大于30°时,个别点的平面误差达到了55.3mm,不满足规范要求的≤±50mm。
