基于PLC 模糊控制的小型花卉玻璃温室温度控制
2021-05-20姚文斌
叶 超 姚文斌 万 航
(浙江经济职业技术学院,浙江 杭州 310016)
0 引言
我国是一个有着悠久农业种植历史的国家, 但我国的农业都是传统模式, 国内的温室种植起步时间较晚, 一直到20 世纪60 年代才开始引进和建造了全国第一个塑料大棚温室,且规模很小。 经过这几十年的发展,虽然温室种植的数量已经增加了很多,但是其智能化程度并没有跟上,还处于科技含量比较低的层次。 因此,迫切需要一个具有高效益且成本比较低的温室。
小型花卉玻璃温室对温度的控制是一个非常复杂的问题,且具有很大的变化性、非线性,其中随机性也非常强,因此很难去建立一个完整的数学模型。 传统的控制方式都无法很精准地控制玻璃温室内的温度变化,而模糊控制无须提前建立数学模型,根据实际发生的变化,利用使用人员的经验,就可以对其进行控制。
1 模糊控制器的设计
1.1 模糊控制系统的组成
模糊控制又被称为模糊逻辑控制,它是一种以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术[1]。 模糊控制器是一种非常容易被掌控的非线性控制器,该控制器的鲁棒性和适应性很好,同时该控制器的容错率也很高[2]。 模糊控制器的理论化操作步骤如图1 所示。
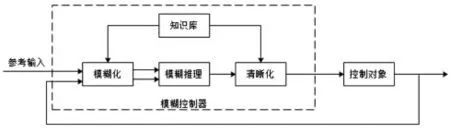
图1 模糊控制器示意图
模糊控制器的控制规律是用计算机的程序来完成,实现一步模糊控制算法的过程是:计算机采样获得被控制量的准确值, 然后将该控制量与给定值对比得到误差信号E; 一般选用误差信号E 作为模糊控制器的一个输入量, 将误差信号E 的精准量进行模糊量化转化成模糊量, 误差信号E 的模糊量可以用对应的模糊语言说明; 然后得到误差E 的模糊语言集合的一个子集e;然后利用合成规则对子集e 和模糊控制规则R进行模糊决策,从而可以获得模糊控制量u,u=Er[3]。
1.2 温室温度模糊控制器设计
模糊控制器是根据人对目标环境的操控来进行模拟的,在玻璃温室的真实环境中,需要使用人员时刻监控着温度的变化, 根据温度变化进行平台的操作,来实现准确的温度控制[4]。 然而,对于小型花卉玻璃温室,对于温度变化的控制需要更快的反应,且稳定性要高,因此,需要建立一个模糊控制平台来实时监视玻璃温室内的温度变化。 本文建立的模糊控制平台根据实时监控获得小型花卉玻璃温室的室内温度参数t,将该参数t 与最优化的温度做一个减法,可以得到参数误差e, 经过模拟控制平台中的多个参数的模糊控制(过程为模糊化—模糊推理—逆模糊化),得到参数u[5]。 作用到被控制的对象上,让该目标可以迅速地调整小型花卉玻璃温室中的温度,如图2 所示。
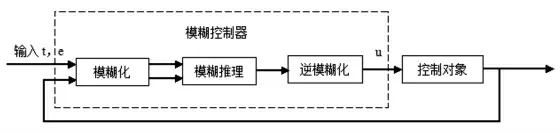
图2 小型花卉玻璃温室模糊控制系统流程图
1.3 输入模糊化
本文使用了Matlab 软件来建立模糊控制系统的模型, 对模糊温度控制做出仿真使用了Matlab 中的simulink 功能。 根据玻璃温室温度控制系统条件的需要,可以得到输入量为玻璃温室内真实温度t,反馈数据真实温度和目的温度的偏差e, 输出量为控制温度u。 接着对,温度区域进行模糊化和逆模糊化处理。
根据试验的真实情况分析,得到了e 与t 的 范围是 [-20,20],[0,40]。 由于温度控制系统的操控精度问题,本文对e 与t 都采用了7 个模糊子集合的划分,获得了7 个模糊子集合输入情况和所属的示意图。

图3 温度偏差的模糊子集合与归属函数
其中,Z 为零,PS 为正小,PM 为正中,PB 为正多,NS 为负小,NM 为负中,NB 为负多。
按照温度偏差的模糊集与隶属度函数示意图,从上面可以获取e 的取值,见表1 所示。
温度偏差的模糊子集与隶属度函数如图4 所示。
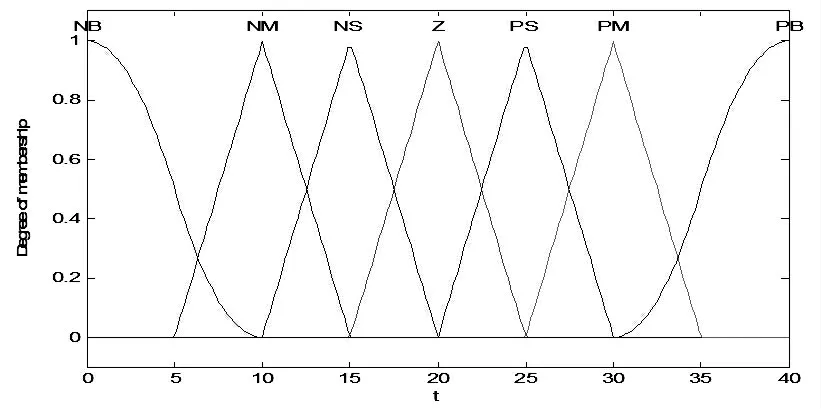
图4 真实温度的模糊集合归属函数
其中,Z 为零,PS 为正小,PM 为正中,PB 为正多,NS 为负小,NM 为负中,NB 为负多。
根据温度偏差的模糊集与隶属度函数示意图,从上面可以获得e 的 取值,如表2 所示。
1.4 输出逆模糊化
输出量为温度控制参数u,定义其范围为[-20,20],与 输入模糊化相同,u 也有7 种模糊子输出情况,输出量u 的归属度函数如图5 所示:
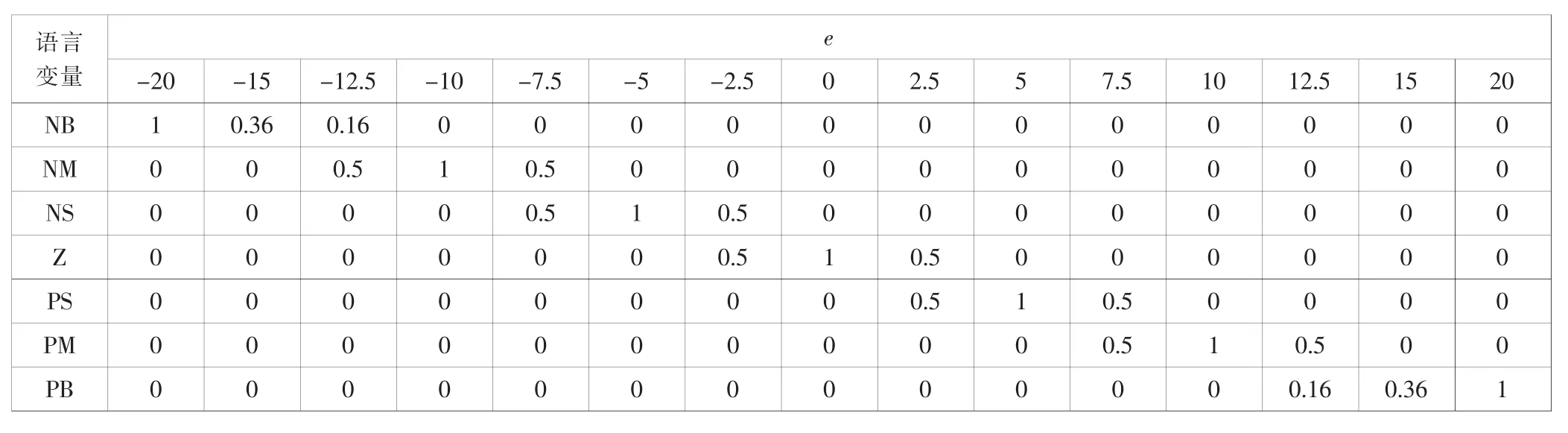
表1 迷糊偏差e 模糊控制的取值表
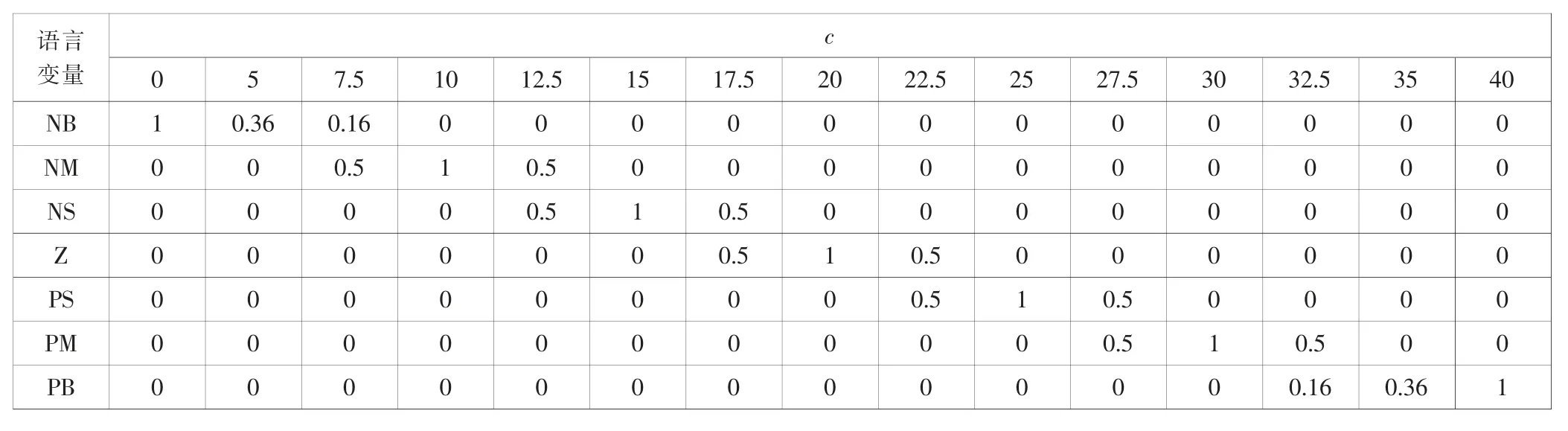
表2 真实温度t 模糊控制的取值表
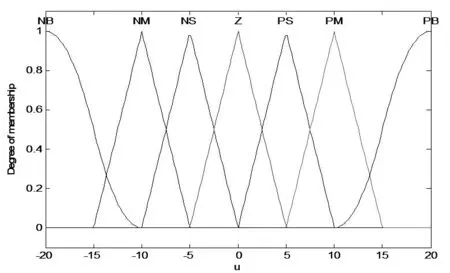
图5 输出u 的归属度函数
其中,Z 为零,PS 为正小,PM 为正中,PB 为正多,NS 为负小,NM 为负中,NB 为负多。
根据真实温度的模糊集与隶属度函数示意图,从这里可以得到真实温度的取值表,如表3 所示。
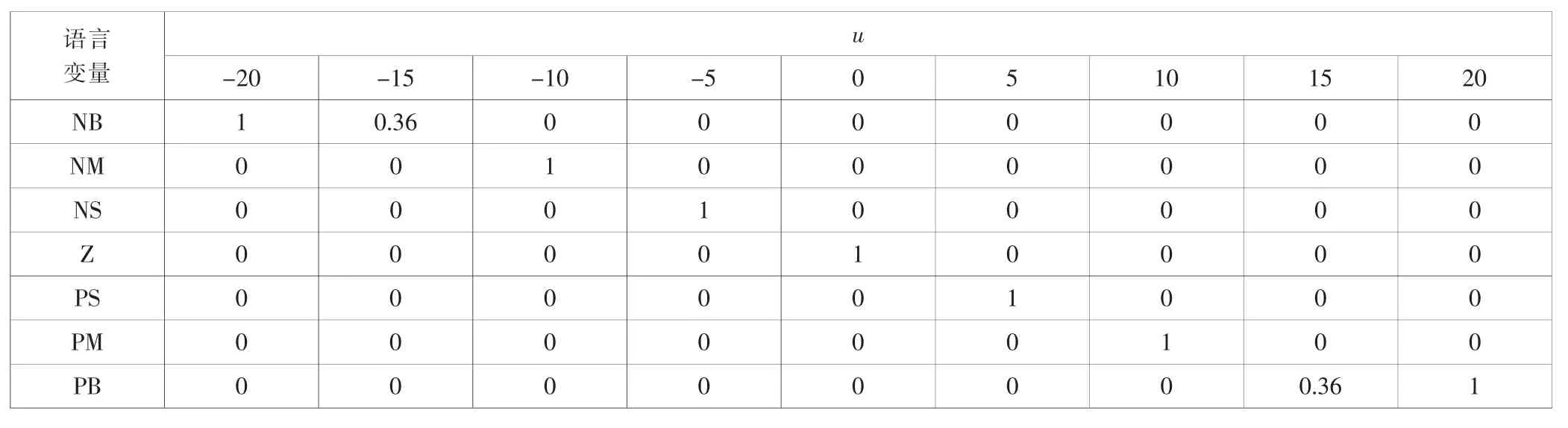
表3 真实温度t 模糊控制的 取值表
1.5 模糊规则
根据人工控制的策略和获得的数据,构建了与实际温度范围相似的模糊规则,通过仿真与调整,最终得到了如下的模糊规则,如表4 所示。

表4 模糊规则
将表1、表2、表3、表4 的数据相结合,采用最大隶属度法,就可以得到控制子集的相应量化,如表5所示。

表5 输出u 的模糊控制规则量化表
2 结语
为验证本文的模糊控制系统的准确性, 采用了Matlab 软件进行仿真,经仿真得出结果,如图6 所示,采用模糊控制的控制系统具有反馈速度最快、控制的准确性高、稳定性强的优点,在达到预期温度的时候可以忽略其中的超调量。 由于模糊控制系统的适用性极强,所以只要修改部分参数,就可以控制其他的对象。 因此,该控制系统能极大的应用到不同种类的花卉玻璃温室当中。
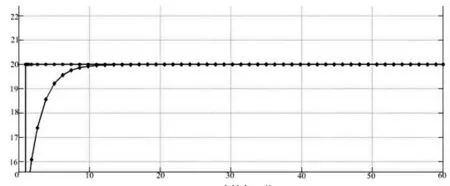
图6 温度控制图像